CdTe基能量分辨X射线光子计数探测器性能分析
需积分: 5 102 浏览量
更新于2024-07-09
收藏 3.99MB PDF 举报
"CdTe基能量分辨X射线光子计数探测器的性能评估:电荷共享校正算法选择的影响"
本文关注的是基于CdTe(碲化镉)的能源分辨X射线光子计数探测器,这类探测器在医学成像、物质分析和安全检查等领域具有广泛应用。光子计数技术能够提供更精确的能量信息,从而提高图像质量和诊断能力。然而,由于像素尺寸小(通常小于1mm),这些探测器容易受到电荷共享效应(Charge Sharing Effects, CSEs)的影响,这会导致能量分辨率降低和成像质量下降。
电荷共享是指当一个高能X射线光子击中像素阵列时,产生的电荷可能被相邻的两个或更多像素同时检测到,导致能量测量的不准确。为了解决这个问题,已经提出并验证了一系列电荷共享校正算法(Charge Sharing Correction Algorithms, CSCAs)。这些算法的目标是恢复原始光子能量的准确度,从而改善探测器的性能。
文章通过蒙特卡洛模拟和有限元分析,对比了不同电荷共享校正算法的效果。作者Oliver L.P. Pickford、Jeffrey C. Bamber和Dimitra G. Darambara来自英国皇家马斯登NHS基金会信托和癌症研究所联合物理系,他们评估了各种CSCAs在消除CSEs方面的效果,并将这些算法的性能与未进行校正的情况进行了对比。
研究表明,正确选择和应用电荷共享校正算法对于提升探测器的能源分辨率和空间分辨率至关重要。不同的算法可能会对系统的整体性能产生显著影响,包括信噪比、能量分辨率以及成像的细节表现。因此,在实际应用中,根据具体需求和系统特性选择合适的CSCA是优化探测器性能的关键步骤。
总结起来,该研究强调了电荷共享效应在小型像素X射线光子计数探测器中的问题,以及电荷共享校正算法的重要性。通过深入理解这些效应和算法,可以更好地设计和优化探测器,提高医疗成像和其他应用中的光子计数技术性能。
Sensors 2020, 20, 6093 5 of 24
trilinear interpolation of the relevant CIE maps from the finite element method, resulting in a list
of pre-thresholded signals. SGS then used the rules of a given CSCA (or the no CSCA rules) to run
through the list and identify groups of events that need to be summed into a single readout event.
The total signal produced by these events is then compared to the preset energy thresholds so that the
event can be assigned to the correct energy bin. In a physical system all counters that the event passes
would be incremented by one and then the number of events in each bin determined by subtraction,
however due to the large amount of data being processed in this work the more computationally
expedient approach of assigning signals directly to their correct energy bin was adopted. The resulting
data set contains for each pixel a list of output signal intensities and times, which can be used to
construct an image or aggregated to assess the performance of the detector as a whole. Due to the flat
field irradiation used, the aggregated readout scheme was used in this work.
2.4. Charge Sharing Correction Algorithms Considered
All CSCAs considered in this work function in a similar way, by identifying events that occur in
nearby pixels within some time window and summing them together to form a single event. The theory
behind this approach is that events that are spatially and temporally close together are more likely to
result from a single photon generating charge across multiple pixels than to originate from multiple
independent photons. By summing these events together then it is hoped that the original energy of
the incident photon can be reconstructed. The CSCAs considered in this work were classified with
respect to two terms: neighbourhood size and neighbourhood locality.
Neighbourhood size (NS) refers to the size of the search area, in pixels, over which events were
identified for summing. 2
×
2 CSCAs consisted of a 2-pixel by 2-pixel search area, whilst 3
×
3 CSCAs
utilized a 3-pixel by 3-pixel search area.
Neighbourhood locality (NL) refers to the way in which the search area (neighbourhood) is defined,
as shown in Figure 1. Static CSCAs use a predefined scheme to link all pixels to a unique NxN
neighbourhood of pixels that does not change throughout the irradiation. In contrast, dynamic CSCAs
define the NxN neighbourhood relevant to each event only when that event is detected, using a predefined
rule. For the dynamic 2
×
2 CSCA in this work that rule is that the event is placed in the bottom left pixel
of a 2
×
2 search area. For the dynamic 3
×
3 CSCA in this work the rule is that the event is placed in the
middle pixel of a 3
×
3 search area. Due to this on-the-fly neighbourhood construction, dynamic CSCAs
may lead to a case where proposed neighbourhoods would overlap. Pixels called multiple times in quick
succession like this report their full charge to the first neighbourhood they are assigned to, but a charge
of zero to all subsequent calls, until they have reset and are ready to detect another event.
Sensors 2020, 20, x FOR PEER REVIEW 5 of 24
The total signal produced by these events is then compared to the preset energy thresholds so that
the event can be assigned to the correct energy bin. In a physical system all counters that the event
passes would be incremented by one and then the number of events in each bin determined by
subtraction, however due to the large amount of data being processed in this work the more
computationally expedient approach of assigning signals directly to their correct energy bin was
adopted. The resulting data set contains for each pixel a list of output signal intensities and times,
which can be used to construct an image or aggregated to assess the performance of the detector as a
whole. Due to the flat field irradiation used, the aggregated readout scheme was used in this work.
2.4. Charge Sharing Correction Algorithms Considered
All CSCAs considered in this work function in a similar way, by identifying events that occur in
nearby pixels within some time window and summing them together to form a single event. The
theory behind this approach is that events that are spatially and temporally close together are more
likely to result from a single photon generating charge across multiple pixels than to originate from
multiple independent photons. By summing these events together then it is hoped that the original
energy of the incident photon can be reconstructed. The CSCAs considered in this work were
classified with respect to two terms: neighbourhood size and neighbourhood locality.
Neighbourhood size (NS) refers to the size of the search area, in pixels, over which events were
identified for summing. 2 × 2 CSCAs consisted of a 2-pixel by 2-pixel search area, whilst 3 × 3 CSCAs
utilized a 3-pixel by 3-pixel search area.
Neighbourhood locality (NL) refers to the way in which the search area (neighbourhood) is
defined, as shown in Figure 1. Static CSCAs use a predefined scheme to link all pixels to a unique
NxN neighbourhood of pixels that does not change throughout the irradiation. In contrast, dynamic
CSCAs define the NxN neighbourhood relevant to each event only when that event is detected, using
a predefined rule. For the dynamic 2 × 2 CSCA in this work that rule is that the event is placed in the
bottom left pixel of a 2 × 2 search area. For the dynamic 3 × 3 CSCA in this work the rule is that the
event is placed in the middle pixel of a 3 × 3 search area. Due to this on-the-fly neighbourhood
construction, dynamic CSCAs may lead to a case where proposed neighbourhoods would overlap.
Pixels called multiple times in quick succession like this report their full charge to the first
neighbourhood they are assigned to, but a charge of zero to all subsequent calls, until they have reset
and are ready to detect another event.
(a) (b)
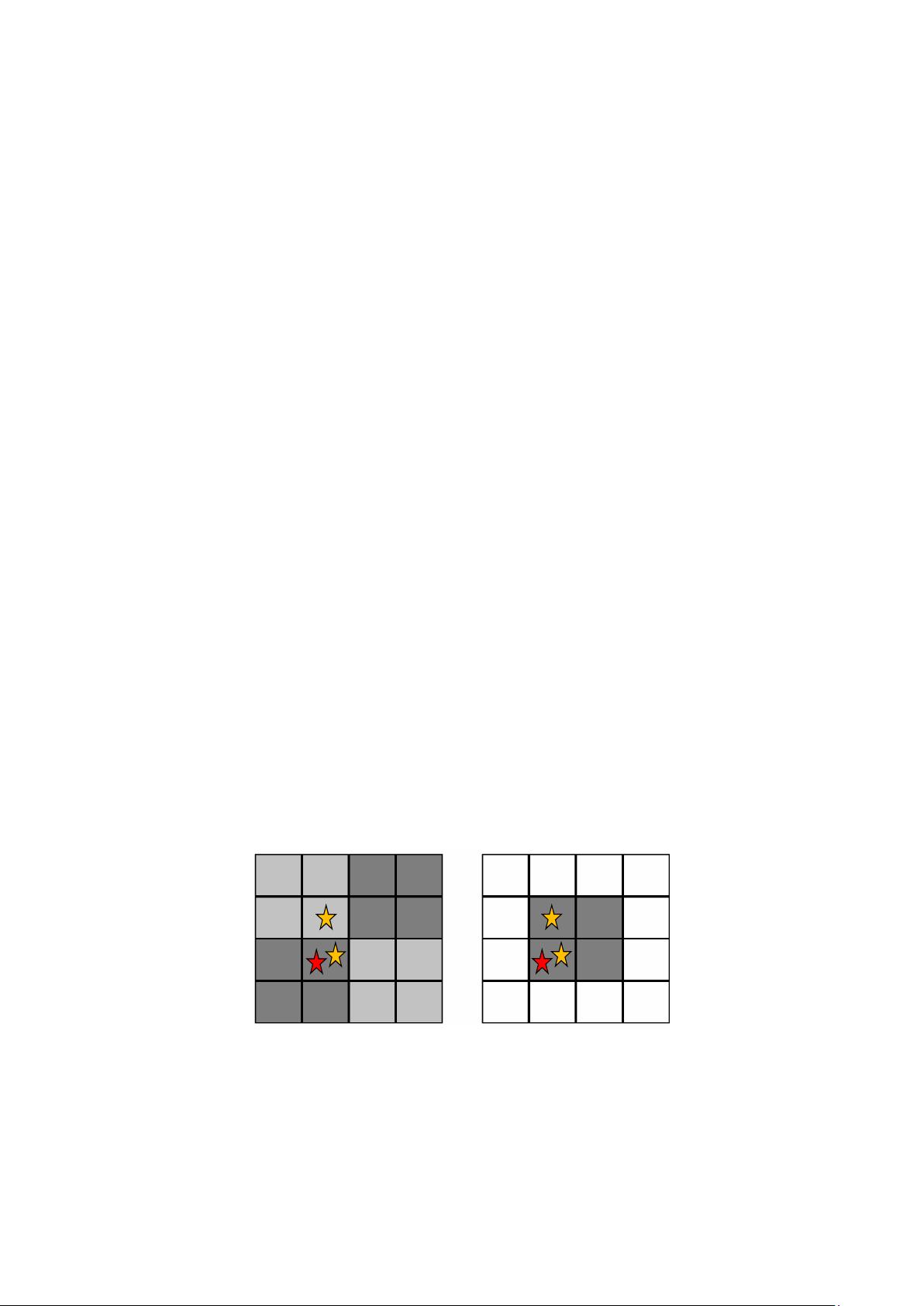
Figure 1. A 16 pixel array containing 3 detected events, with the red star representing the first of these
events to be detected. (a) Static charge sharing correction algorithms (CSCAs) predefine the various
search areas (shades of grey) before any events are detected. (b) In contrast, dynamic CSCAs define
search areas after an event is detected based on a predetermined rule. In this case, the dynamic 2 × 2
CSCA is being applied, so the 2 × 2 search area is defined such that the first detected event is in the
bottom left pixel of the search area.
Figure 1.
A 16 pixel array containing 3 detected events, with the red star representing the first of these
events to be detected. (
a
) Static charge sharing correction algorithms (CSCAs) predefine the various
search areas (shades of grey) before any events are detected. (
b
) In contrast, dynamic CSCAs define
search areas after an event is detected based on a predetermined rule. In this case, the dynamic 2
×
2
CSCA is being applied, so the 2
×
2 search area is defined such that the first detected event is in the
bottom left pixel of the search area.
剩余23页未读,继续阅读
2020-03-14 上传
Study of half-metallic ferromagnetism in V-doped CdTe alloys by using First-Principles calculations.
2021-02-09 上传
2021-02-07 上传
2021-02-07 上传
101 浏览量
2021-04-05 上传
114 浏览量
2012-06-25 上传
2021-02-10 上传

Abelardo
- 粉丝: 440
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- 国王脚本
- BaseDesktopApp:电子+ Vue +元素=酷炫的桌面应用
- my_i2c.zip
- 媒体相关图标 .ai .svg .eps .png .psd素材下载
- modeshape-sequencer-xsd-3.6.1.Final.zip
- portfolio:网站充当投资组合
- react-native-translate:满足简单需求的简单包装
- hw1-lee2021
- yolov7训练自己的数据集+教程+二维码检测
- 响应式生活博客设计网站HTML5模板.zip
- .moc
- wordscrambler:另一个单词打乱游戏
- swagger-ui 压缩包
- 105℃长寿命小形品(5000小时)-铝电解电容器.zip
- StarCitizen-Helper:StarCitizen-Helper:Включениелокализации
- 与异常检测相关的书籍,论文,视频和工具箱-Python开发
