摄像机标定:透视投影与针孔模型解析
需积分: 40 41 浏览量
更新于2024-09-13
1
收藏 1.19MB DOCX 举报
"摄像机标定详解版"
摄像机标定是计算机视觉和机器视觉领域中的关键步骤,它涉及到确定摄像机内部和外部参数的过程,目的是校正镜头畸变并建立摄像机像素坐标与真实世界物理坐标之间的联系。摄像机标定的重要性在于,它可以将图像数据转换为具有实际物理意义的测量值,这对于精准的三维重建和物体定位至关重要。
1. 摄像机标定的概念与作用
摄像机标定的主要目标是消除镜头畸变,使得图像中的点能对应到真实世界中的精确位置。它包括计算内参(如光学中心、焦距、畸变系数)和外参(摄像机在世界坐标系中的位置和姿态)。通过标定,我们可以得到以米或毫米为单位的目标物体在世界坐标系中的坐标,从而实现与物理世界的对接。
2. 摄像机模型与透视投影
摄像机模型通常采用针孔模型,由摄像机、镜头和图像采集卡(如果存在)构成。在透视投影下,三维空间中的点通过中心投影法映射到二维图像平面上。透视投影的特征是所有投影线都汇聚于一点,即投影中心。摄像机的参数可以用一个固定的数学公式表示,其中包含三维空间点和二维图像坐标的映射关系。
3. 针孔摄像机模型
针孔摄像机模型是一种理想化的简化模型,它假设光线经过一个微小的孔径进入相机,形成图像。虽然实际摄像机使用透镜来收集更多的光线,但这也引入了畸变。摄像机的焦距f是模型中的重要参数,它定义了从透镜到传感器平面的距离,影响着成像的清晰度和缩放比例。
4. 坐标系与坐标转换
在摄像机标定中,涉及多种坐标系,如世界坐标系、摄像机坐标系和图像坐标系。世界坐标系是全局参考系,摄像机坐标系以摄像机为中心,图像坐标系则基于像素位置。坐标系之间的转换涉及到旋转和平移矩阵,这些矩阵是外参的一部分,用于将世界坐标系中的点转换到摄像机坐标系,再进一步转换到图像坐标系。
5. 标定过程与算法
摄像机标定通常使用已知特征点的图案(如棋盘格)作为输入,通过检测这些特征点在图像上的位置,计算内参和外参。OpenCV库提供了标准的摄像机标定算法,如 Zhang 的方法和 Hartley-Zisserman 的方法,它们通过最小化重投影误差来优化参数。
摄像机标定是计算机视觉中不可或缺的一环,它允许我们从图像数据中提取具有物理意义的信息,为各种应用,如自动驾驶、机器人导航、三维重建等提供基础。理解并掌握摄像机标定的原理和实践方法,对于提升计算机视觉系统的表现至关重要。
型开始,处理基本几何中的投影射线。遗憾的是,真实的针孔由于不能快速曝
光收集足够的光线,因此他不是一个得到图像的好方法。这也是为什么眼睛和
摄像机都要使用透镜而不是仅仅只用一个点来收集更多光线的原因。然而,这
种利用透镜得到更多光线的缺点是,不仅使我们背离了所使用的简单针孔几何
模型,而且引入来自透镜的畸变。
2.1 针孔摄像机模型
摄像机中最简单的针孔模型。f 是摄像机的焦距,Z 是摄像机到物体的距离,
X 是物体的长度,x 是图像平面上的物体图像,可以得到-x/f=X/Z.下面是针孔
模型图:
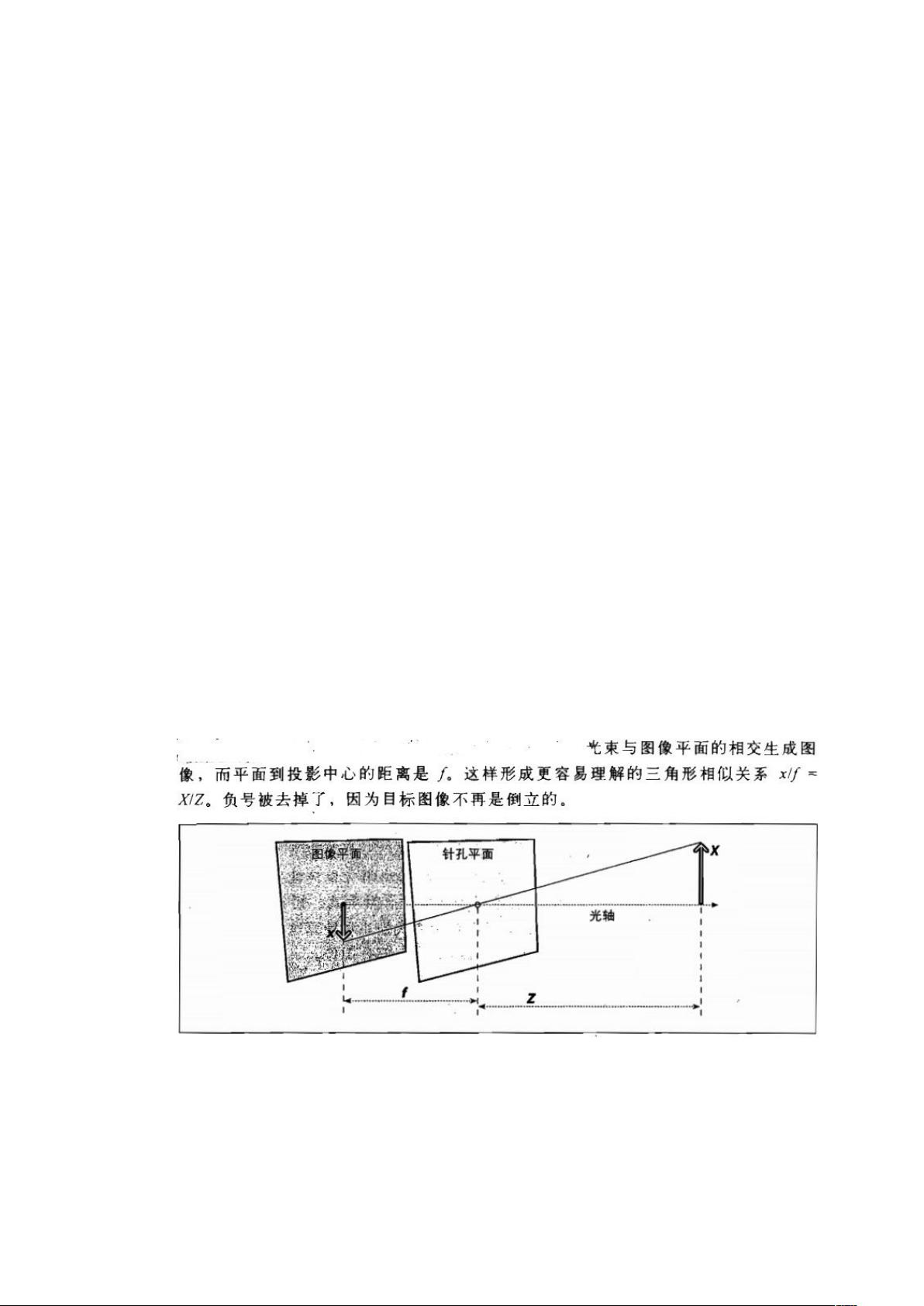
重新把针孔摄像机模型整理为另外一种等价形式,目的是为了使得其数学
形式更简单一些。我们交换上图中的针孔和图像平面。此时,针孔中的点被理
剩余12页未读,继续阅读
797 浏览量
1535 浏览量
2008-06-21 上传
2024-11-10 上传
2024-11-10 上传
2024-11-08 上传
2024-11-10 上传
2024-10-31 上传
2024-11-09 上传

小勺挖泰山
- 粉丝: 89
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决Android应用混淆错误:Can't process class的方法
- 零基础入门AppInventor开发Android应用
- 掌握简易正则表达式,轻松编程 — SimpleRegex介绍
- C语言字符串行查找方法解析
- 键盘模拟与自动化控制技术 - KeyCode应用
- Get Arrays Udemy课程支持门户网站:Angular、Spring和JWT实战
- 《愤怒的小鸟》第二阶段:类继承与图像处理深度解析
- OpenGL下模拟泡泡物理动态的实现方法
- 解决VC++编译错误:如何正确包含bios头文件
- 打造高效jQuery插件:jQuery.nice助您一臂之力
- R语言自定义组学分析函数库的介绍
- 实现高效无刷新聊天室的ASP.NET+AJAX源码解析
- H5游戏开发实例:Web2.0打地鼠与迷宫游戏
- MFC C++ 数字图像处理编程技术详解
- 纯OC与纯Swift实现的手势滑动返回教程
- GwasQcPipeline测试数据集:伪造样本与Illumina测试案例
