Global Transformer Tracking解析:多目标追踪新方法
需积分: 44 72 浏览量
更新于2024-08-04
收藏 11.38MB PDF 举报
"本文主要解析2022年CVPR会议上发表的‘Global Transformer Tracking’论文中的公式,探讨多目标追踪技术,特别是如何利用全局变换器进行目标检测和跟踪。"
在多目标追踪(Multi-Object Tracking, MOT)领域,Global Transformer Tracking论文提出了一种新的方法,它结合了目标检测和追踪,打破了传统的Tracking-by-Detection范式。该方法通过全局变换器(Global Transformer)来处理图像序列,以实现更高效且准确的目标关联。
1. **目标检测与追踪的分解**:
在传统的Tracking-by-Detection框架中,追踪任务分为两步:首先进行目标检测,生成一系列候选目标,然后进行数据关联,将这些候选目标与历史轨迹相匹配。Global Transformer Tracking则尝试同时处理这两个步骤,通过全局上下文信息增强目标检测和追踪的关联性。
2. **公式解析**:
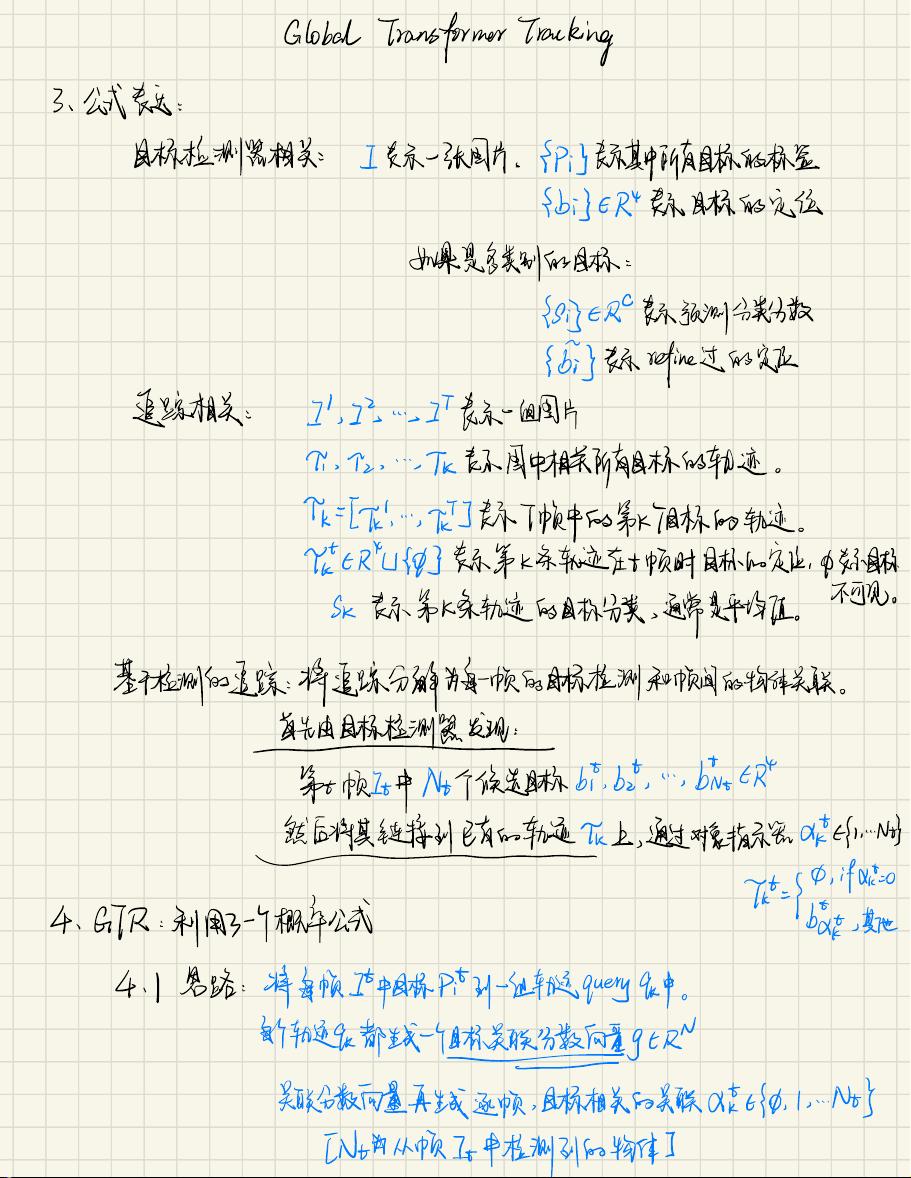
- **目标检测相关**:用{bi}表示图像中的目标标签,它们属于类别集合{Ci},并且每个目标都有一个边界框定义bi ε R^4。对于多类别目标,Si ε RC表示预测的分类分数。
- **追踪相关**:Ii表示图像序列,πk表示轨迹,其中k表示轨迹编号,t表示时间帧,Lu表示第k条轨迹在时间t的目标定位,SK表示轨迹的分类。
3. **全局变换器的运作**:
- **基于检测的追踪**:每帧图像通过目标检测器产生N0个候选目标,然后利用对象指示器αk将这些候选目标与已有轨迹进行匹配。关联分数向量^γgt用于表示这种关联性。
- **轨迹生成与关联**:对于每帧图像I,目标Pi与轨迹query q生成关联分数向量g(qk, F),其中F包含目标特征。softmax操作将这些分数转换为概率分布,用于确定目标与轨迹的匹配。
4. **训练过程**:
- **两阶段训练**:Global Transformer Tracking的训练分为两个阶段,首先进行目标检测器的训练,然后对全局变换器进行联合训练,优化目标检测和追踪的联合概率。
- **非极大值抑制(NMS)**:在目标检测中,NMS用于去除重复的检测结果,确保每个目标只有一个边界框。在Global Transformer Tracking中,这个机制被考虑进来,以确保在轨迹上的分布与目标框的分布一致。
5. **最终目标关联**:
- **Softmax映射**:最终的关联分数通过softmax操作转化为概率,表示为PA(α0|i|qk,F),其中i对应于每个目标,j对应于所有可能的关联。这个概率分布用于决定每个目标应该关联到哪个轨迹。
- **目标分配**:通过将框上的分布转化为轨迹上的分布,如PT(π|qk,F),可以计算出每个轨迹的可能性,从而进行目标分配。
Global Transformer Tracking通过全局信息的处理,改进了多目标追踪的效率和准确性,尤其是在复杂的场景中,能够更好地维持目标的连续性和一致性。其创新之处在于将目标检测与追踪融合,通过全局变换器进行端到端的学习,提升了整个系统的性能。
Global
Transformer
Yrocking
3
.
公式表达
:
⽬标拉测器相关
:
表示⼀张国⽚⼯
,
{
部
i
}
示其中所有⽬标的标签
{
bi
}
ε
R
4
示⽬标的定意
如果是多类别的⽬标
:
Si
{
}
ε
RC
表示预测分类分数
{
bi
}
表示
nefie
过的定项
追踪相关
:
Ii
,
I
=
,
…
,
IT
表示⼀组图⽚
π
⼝
,
…
,
在表及图中相关所有⽬标的轨
。
迹
k
=
[
灭
!
…
,
了表示
T
帧中的轨迹第
K
个⽬标的
农
ERU
{
l
}
表示第
K
条轨迹在
t
顺时⽬标的定位
,
④
表⽬标
SK
表示第
K
条轨迹的⽬标分类
,
通常是平均值
。
不可⻅
。
基检测的追踪
:
将追踪分解为每顿的⽬标检测和顺间的物体系由⽬标检测器发现
—
N
0
个候选⽬标
bt
,
bt
,
…
,
bv
以第
1
中
然后将其链接到已有的轨迹农上
,
通过对象指示器
α
k
ε
{
…
—
4
.
G
项
:
⽤了⼀个概率公式利
π=
先时东
思路
:
将每帧
I
中⽬标
Pit
到⼀组轨还
query
中
敏轨迹
q
和都⽣成⼀个⽬标关联分数向量
^Ʃ
g
关联分数⽽量再⽣成逐帧
,
⽬标相关的关联
α
kt
ε
{
l
,
1
,
…
No
}
[
N
②
从顺
。
中检测到的物体了
下载后可阅读完整内容,剩余3页未读,立即下载
2022-09-24 上传
2016-01-08 上传
2010-12-03 上传
2024-04-18 上传
点击了解资源详情
2023-05-31 上传
2023-06-28 上传
2023-07-27 上传

zz的大穗禾
- 粉丝: 247
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- 讨论论坛:学习React-Redux
- INAI Host-crx插件
- ink-enhancement
- GoodNewsExtends:10月CMS插件扩展了GoodNews插件
- spacebox
- operating-system-x86-64bit:具有TARFS文件系统的x86体系结构(64位)的基本操作系统。 使用INT $ 80支持fork(),cow(),分页,虚拟memoryring3用户进程和syscall。 能够运行shell和二进制文件:ls,cat,echo,kill,ps,sleep
- jQuery网页瀑布流插件masonry
- MATLAB-Application-in-Mathematical-Modeling
- dashboard:带有laravel和Chart.js的仪表板项目
- 社交锻炼应用:社交健身者
- NoteCatcher:NoteCatcher 是一个用于笔记的 Web 应用程序。 :file_cabinet:Firebase :man_technologist:Python :link:Microsoft Azure
- exprz:表达式库
- Maise data gathering tool-crx插件
- capstone-project:体式的克隆
- linux-device-driver-tutorial:本教程讨论了开发自己的linux设备驱动程序的技术问题。 本教程的目的是提供简单实用的示例,以便每个人都能以简单的方式理解概念
- reddit-spyglass:允许您查看 reddit 帖子分数,即使它们被隐藏
