自动驾驶车辆未知环境路径规划算法
需积分: 0 163 浏览量
更新于2024-06-30
收藏 2.67MB PDF 举报
"Dmitri Dolgov等人在2010年发表的文章‘Path Planning for Autonomous Vehicles in Unknown Semi-structured Environments’,详细介绍了在未知或半结构化环境中,自动驾驶车辆的路径规划算法。该研究由Toyota Research Institute的AI&Robotics Group以及Stanford University的Stanford Artificial Intelligence Laboratory共同完成,并在2007年的DARPA Urban Challenge实验中得到了验证。"
文章的核心是针对自动驾驶车辆在未知或半结构化环境中的路径规划问题,提出了一个实用的算法。这种环境的特点是障碍物由机器人传感器在线检测。作者们设计的算法分为两个主要阶段:
第一阶段,他们采用了一种A*搜索算法的变体,但将其应用到车辆的3D动力学状态空间中,目的是生成一条动力学上可行的轨迹。A*搜索是一种经典的路径规划算法,通过评估每个节点的代价和估计到达目标的总代价,找到最优路径。在3D动力学状态下,算法需要考虑到车辆的速度、加速度、位置等多维度参数,确保生成的轨迹不仅避免碰撞,而且符合车辆的动力学限制。
第二阶段,为了进一步优化解决方案的质量,算法通过数值非线性优化技术进行改进。这一步骤旨在寻找局部(甚至全局)最优解,通过微调路径参数,如曲线平滑度、行驶时间、能耗等,以达到最佳性能。这一过程可能涉及到多次迭代,直到路径达到最优状态。
此外,文章还扩展了这个算法,可能包含了适应环境变化和不确定性处理的策略,以应对实时传感器数据的变化。这可能包括概率建模、动态障碍物预测以及鲁棒控制理论的应用,确保自动驾驶车辆能在复杂环境中安全、高效地行驶。
Dolgov等人提出的算法结合了搜索和优化方法,提供了一种适用于现实世界自动驾驶系统的高效路径规划方案。其在实际挑战中的成功验证表明,该算法能够在未知环境中有效应对复杂导航任务,对于推动自动驾驶技术的发展具有重要意义。
488 THE INTER NATIONAL JOURNAL OF ROBOTICS RESEARCH / April 2010
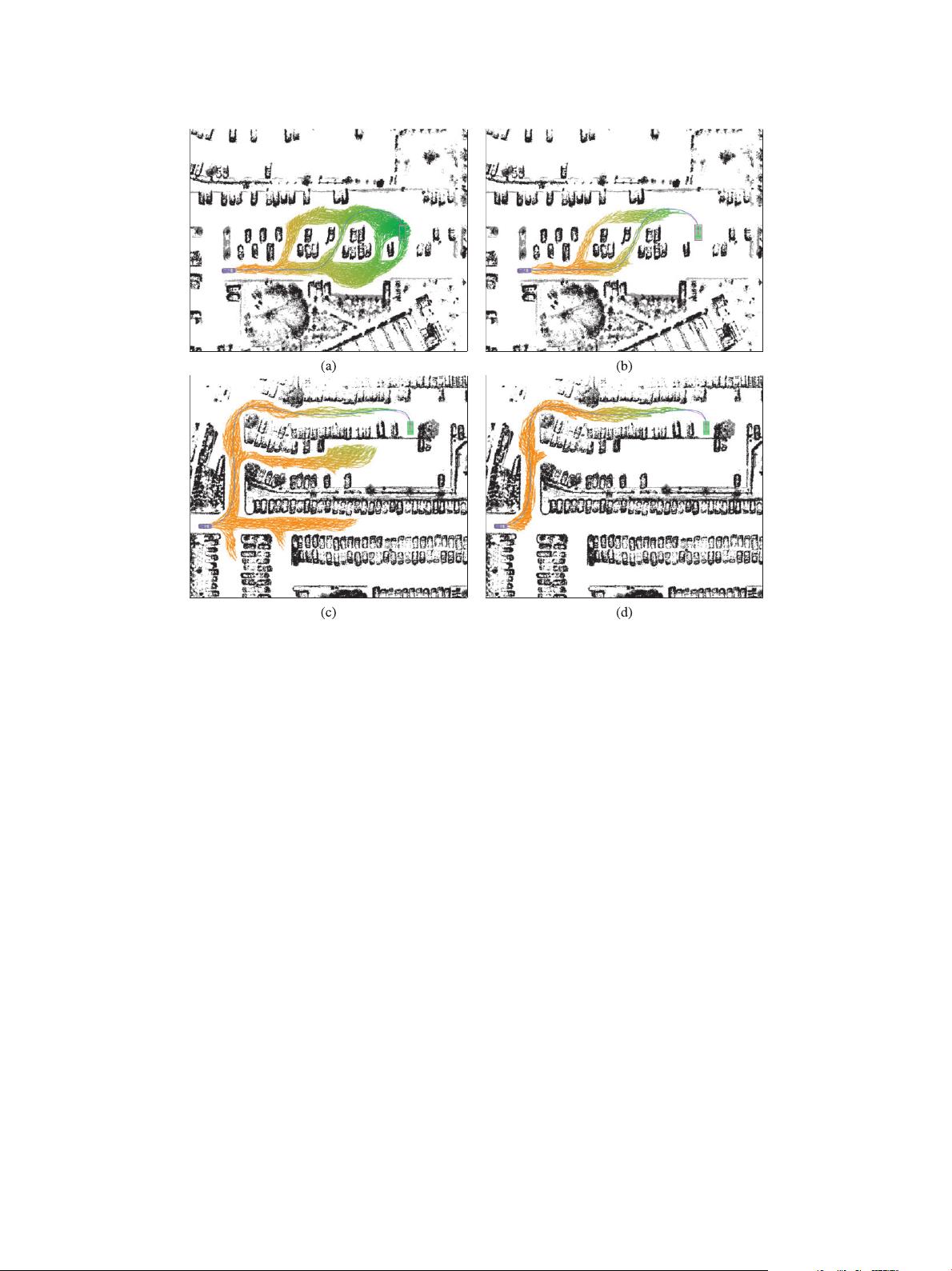
Fig. 3. Search heuristics. Euclidean 2D distance e xpands 20,790 nodes (a). The non-holonomic-without-obstacles heuristic is
better: it expands 12,196 nodes (b), but can lead to wasteful exploration of dead-ends in more complex settings (c), where it
expands 37,181 nodes. Combining the latter with the holonomic-with-obstacles heuristic leads to a search tree with 11,302 nodes
(d).
essence, given some path-cost function (e.g. collision avoid-
ance) imposed on the configuration space f
3
6x1 y127,wecre-
atea2Dversion f
2
6x 1 y7 2 min
2
f
3
6x1 y127. For example, a
2D state is assumed to be safe (collision cost is 0) if there ex-
ists at least one safe 3D state with the same 2D projection. This
heuristic is clearly admissible. It captures the 2D geometry of
the obstacle map1 for example, it discovers all U-shaped obsta-
cles and dead-ends in 2D and then guides the more expensive
4D search away from these areas.
Since both heuristics are mathematically admissible in the
A* sense, the maximum of the two can be used. In the sce-
nario shown in the bottom row of Figure 3, a search using only
the first (non-holonomic-without-obstacles) heuristic expands
37,181 nodes, while a search that uses both heuristics expands
11,302 nodes.
Heuristics that are essentially equivalent to the ones de-
scribed above were also independently developed (for a
slightly different search method) by the CMU team for the
DUC (Likhachev and Ferguson 20081 Urmson et al. 2008).
Our non-holonomic-without-obstacles heuristic also parallels
the notion of a non-holonomic metric (Laumond et al. 19981
LaValle 2006).
2.2. Analytic Expansions
The forward search described above uses a discretized space
of control actions (steering). This means that the search will
never reach the exact continuous-coordinate goal state (the ac-
curacy depends on the resolution of the grid in A*). To ad-
dress this precision issue, and to further improve search speed,
we augment the search with analytic expansions based on the
Reed–Shepp model (Reeds and Shepp 1990). In the search de-
scribed above, a node in the tree is expanded by simulating a
kinematic model of the car (using a particular control action)
for a small period of time (corresponding to the resolution of
the grid).
In addition to children generated in such a way, for some
nodes an additional child is generated by computing an optimal
Reed–Shepp path from the current state to the goal (assuming
剩余16页未读,继续阅读
2020-02-26 上传
2019-03-14 上传
2022-08-04 上传
2023-07-31 上传
2021-05-10 上传
2021-04-10 上传
2021-04-05 上传
2024-11-27 上传
2024-11-27 上传
2024-11-27 上传

独角兽邹教授
- 粉丝: 39
- 资源: 320
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
