增强自动驾驶车辆性能:人车建议与深度神经网络
PDF格式 | 3.03MB |
更新于2025-01-16
| 133 浏览量 | 举报
自动驾驶车辆的人对车建议与深度神经控制网络研究着重于解决深度神经网络在自动驾驶汽车中的局限性。虽然深度学习模型如深度神经控制器在模仿人类驾驶行为方面表现出色,但它们在处理未见过的场景或与训练数据不一致的情况时可能会显得脆弱,因为这些网络缺乏对图像内容的深度理解。
本文的核心创新在于提出了一种融合人对车建议的解决方案。最终用户可以通过自然语言提供诸如“pedestrians are in the crosswalk”这样的指导,这些建议被编码为车辆控制器的输入。这个端到端的车辆控制器利用了注意力机制,能够根据建议中的关键信息调整其对环境的关注点,比如行人位置,从而指导车辆的转向和速度控制。注意力机制确保了控制器的行为与建议中的对象紧密关联,提高了自动驾驶系统的决策能力。
作者们开发了一个新的建议驾驶数据集,名为本田研究所建议数据集(HAD),其中包含了大量人工注释的人对车建议,旨在供模型进行训练和评估。通过这个数据集,研究人员发现,接受人建议的端到端网络能够显著提升性能,而且相比于仅依赖视觉功能,融入人类智慧的策略更加有效。
值得注意的是,这项工作不仅增强了自动驾驶系统的智能和可靠性,还促进了人车交互的透明度,使人们能够理解车辆的决策过程,并参与到自动驾驶的决策链中。这种结合人类智慧和机器学习的模型对于构建未来安全、可靠的自动驾驶系统具有重要意义。
本研究通过将自然语言的人车建议与深度神经控制网络相结合,解决了自动驾驶车辆在面对复杂环境时的鲁棒性和可解释性问题,推动了该领域的技术进步,为实现更智能、更人性化的自动驾驶汽车奠定了基础。
10591
最终用户
输入图像
人对车建议
例如,在一个实施例中,
“pedestrians are in
控制
命令
可视化
车辆控
制器
文本编
码器
自动驾驶车辆的接地人车建议
Jinkyu Kim
1
,Teruhisa Misu
2
,Yi-Ting Chen
2
,Ashish Tawari
2
,和John
Canny
1
1
EECS,UC Berkeley,
2
Honda Research Institute USA,Inc.
1
{jinkyu.kim,canny}@ berkeley.edu,
2
{tmisu,ychen,atawari}@ honda-ri.com
摘要
最近的成功表明,深层神经控制网络可能是自动驾
驶汽车的关键组成部分。这些网络是在大型数据集上
训练的,以模仿人类的动作,但它们缺乏对图像内容
的语义理解这使得它们在与训练数据不匹配的情况下
变得脆弱和潜在的在这里,我们建议通过使用来自人
类的自然语言建议来增强训练数据来解决这个问题。
建议包括关于做什么和去哪里参加的指导。我们提出
了提供建议的第一步,在那里我们训练一个接受建议
的端到端车辆控制器。控制器调整它关注场景的方式
(视觉
没有建议有建议
模特
注意)和控制(转向和速度)。注意力机制将控制者
的行为与建议中的突出对象联系起来。我们在一个新
的建议驾驶数据集上评估我们的模型,该数据集具有
手动注释的人对车辆的建议,称为本田研究所建议数
据集(
HAD
)。我们表明,采取的意见,提高了性能
的端到端的网络,而网络线索的各种视觉功能所提供
的意见。该数据集可在
https://usa.honda-ri.com/HAD
上
获得。
1.
介绍
在过去的几年里,自动驾驶汽车控制取得了巨大的
进展。最近的成就[3,27]表明,深度神经模型可以通
过有效地从数据中学习潜在表示,以端到端的方式应
用于车辆控制。这些深层控制器的可解释性越来越多
地通过视觉注意力机制[8],解卷积风格的方法[2]和自
然语言模型[9]进行探索。这种可解释的模型将是人车
交互的重要元素,因为它们允许人和车辆理解和预测
彼此
然而,网络
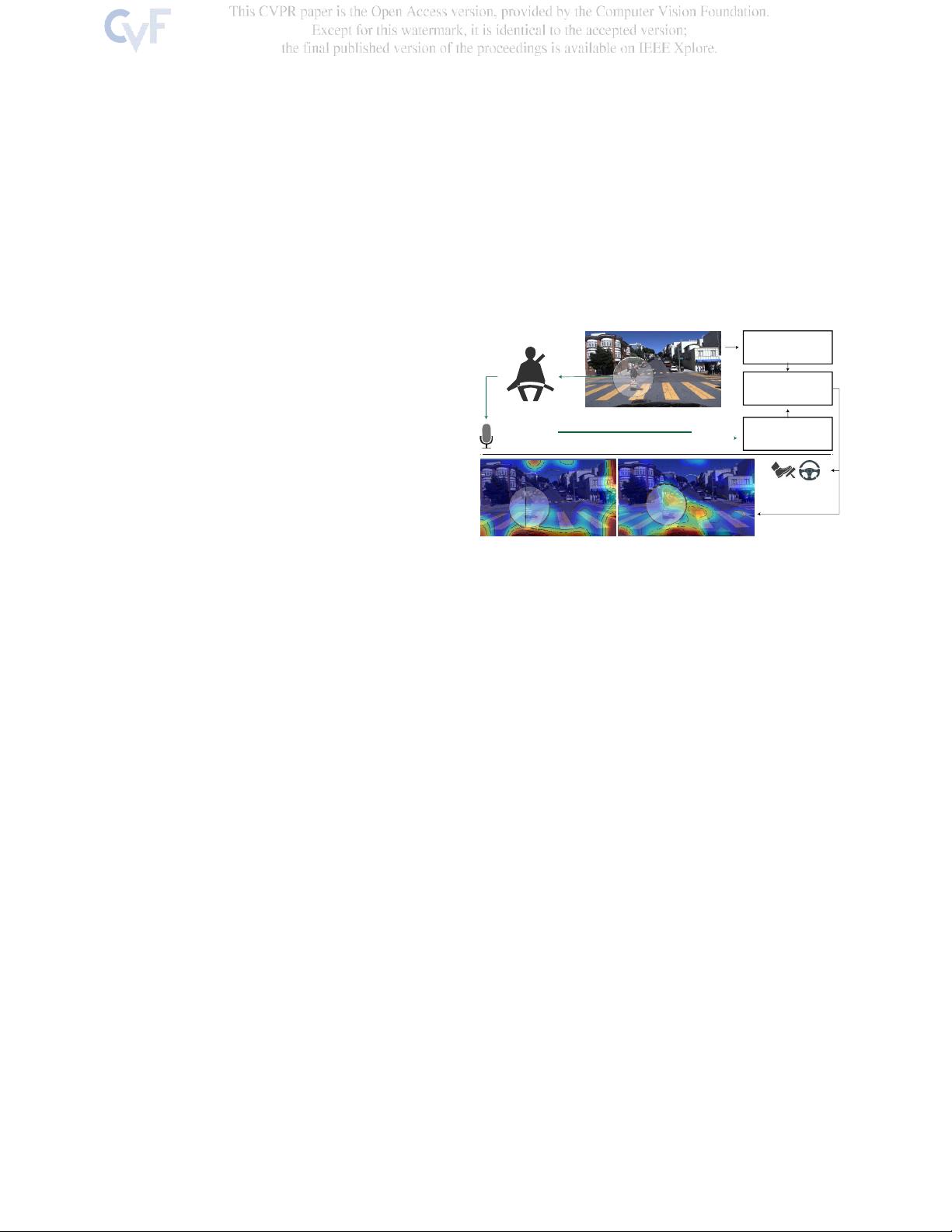
图1:我们的模型将人对车辆的建议作为
输入,即,“行人在人行横道上”,并将其输入车辆控
制器,然后车辆控制器预测一系列控制命令,即,方
向盘角度和车速。我们的驱动模型还提供了一个视觉
解释的形式,注意突出的地区有一个直接的影响功能
估计。视觉化的注意力地图有助于最终用户承认他们
的建议被接受。
我们已经发现,这导致了语义浅的模型,这些模型对
重要的线索(如行人)关注不足,无法预测车辆行为
以及其他线索,如停车灯或十字路口的存在。我们还
认为,驾驶模型能够根据用户输入(快速,温和,风
景优美的路线,避免高速公路等)来适应旅程的“风
格”是很重要的。我们使用术语我们将建议与对车辆的
明确命令区分开来:如果乘客没有完全注意到车辆的
环境,这可能是有问题的。
这项工作的目标是用人类的长期建议来增强模仿学
习数据集(例如,驾驶教练),以及在较短的时间
内,从乘客的车辆。一般来说,建议可能采取条件-动
作规则的形式在本文中,我们研究了模拟-
视觉编
码器
下载后可阅读完整内容,剩余8页未读,立即下载
相关推荐

452 浏览量



cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebDrive v16.00.4368: 简易易用的Windows风格FTP工具
- FirexKit:Python的FireX库组件
- Labview登录界面设计与主界面跳转实现指南
- ASP.NET JS引用管理器:解决重复问题
- HTML5 canvas绘图技术源代码下载
- 昆仑通态嵌入版ASD操舵仪软件应用解析
- JavaScript实现最小公倍数和最大公约数算法
- C++中实现XML操作类的方法与应用
- 设计编程工具集:材料重量快速计算指南
- Fancybox:Jquery图片轮播幻灯弹窗插件推荐
- Splunk Fitbit:全方位分析您的活动与睡眠数据
- Emoji表情编码资源及数据库查询实现
- JavaScript实现图片编辑:截取、旋转、缩放功能详解
- QNMS系统架构与应用实践
- 微软高薪面试题解析:通向世界500强的挑战
- 绿色全屏大气园林设计企业整站源码与多技术项目资源
