DPOD:深度学习驱动的3D对象检测与6D姿态估计新法
PDF格式 | 928KB |
更新于2025-01-16
| 18 浏览量 | 举报
DPOD: 3D对象检测和6D姿态估计方法的研究
在这个深度学习驱动的计算机视觉领域,本文提出了一种创新的方法,称为密集姿态对象检测器 (DPOD),专用于从RGB图像中进行3D对象检测和6D姿态估计。DPOD的核心在于利用深度学习技术来处理复杂的2D-3D对应关系,通过像素级匹配,找出输入图像中物体的精确位置并确定其在三维空间中的精确姿态,包括六个自由度 (6DoF):平移和旋转。
传统的目标检测器,如R-CNN系列、YOLO和SSD,虽然在局部区域识别上表现出色,但针对需要全面理解物体三维位置的应用,如增强现实、机器人导航或机器视觉,仅靠边界框定位是不够的。DPOD通过首先预测每个对象的ID掩码及其对应的2D图像坐标和3D模型坐标,然后利用配准算法如PnP(投影-射影)和RANSAC(随机采样一致性)来计算6D姿态。
该方法的独特之处在于,它不仅依赖真实的训练数据,还结合了合成渲染的数据,这使得DPOD能够在各种场景下保持良好的性能。与只专注于真实数据训练的其他深度学习方法不同,DPOD的泛化能力更强,能够在实际应用中展现出实时的处理速度,尽管在精度方面表现出色。
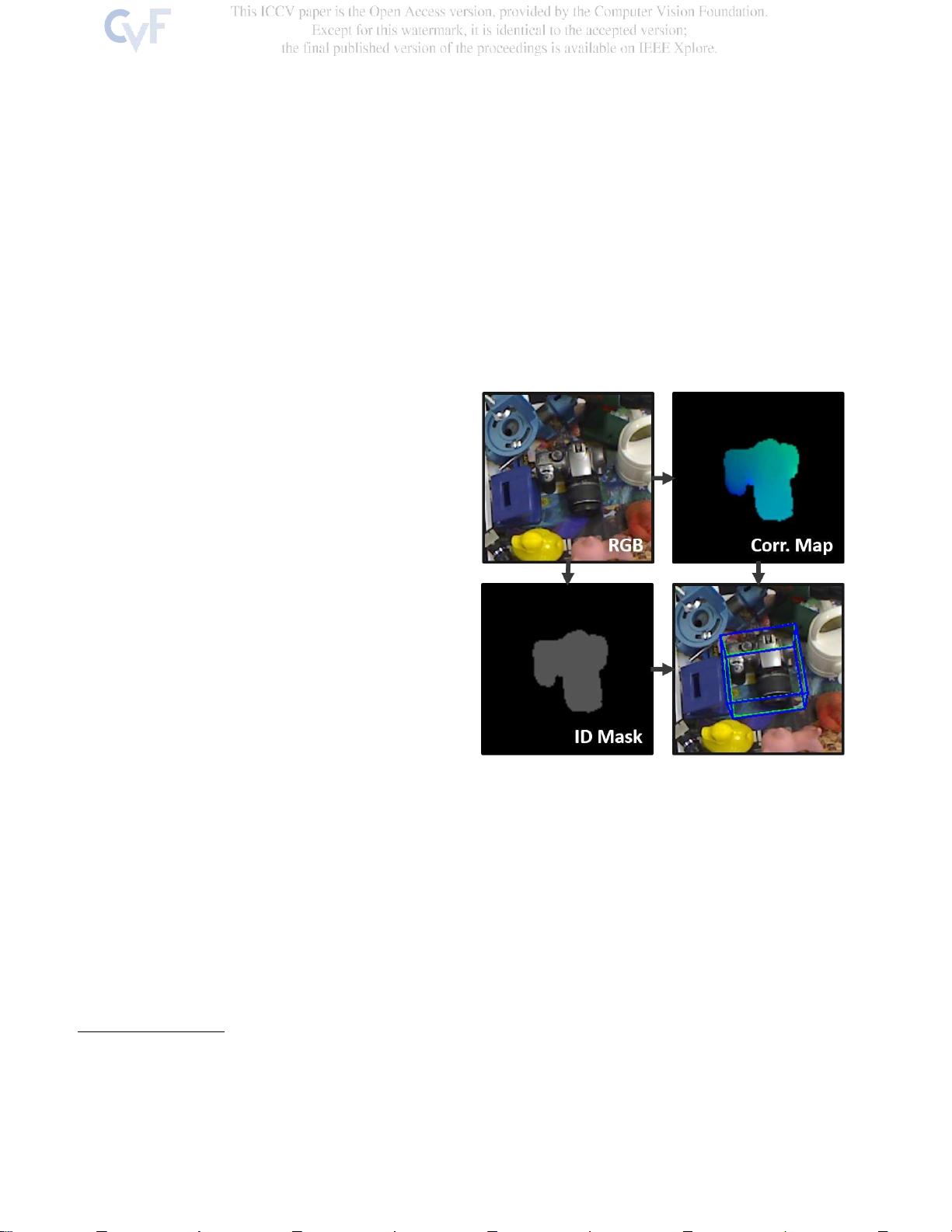
图1展示了DPOD的工作流程,它能够从单个RGB图像中准确地识别出物体,生成对应的ID掩码和2D-3D对应关系,进而得到精确的6D姿态估计。结果显示,绿色的地面实况边界框与蓝色的估计边界框高度重合,表明了该方法在姿态估计上的准确性。
近年来,随着深度学习技术的发展,像SSD6D、YOLO6D、AAE、PoseCNN和PVNet这样的方法已经在6D姿态估计领域取得了显著进展。然而,DPOD的独特融合策略使其在处理RGB图像的复杂性方面脱颖而出,证明了密集对应关系和深度学习细化方案对于提高6D姿态估计的精度和鲁棒性的重要性。
DPOD的研究旨在填补RGB图像中3D姿态估计的空白,提供了一种高效且准确的解决方案,对提升许多应用中的用户体验和系统性能具有重要意义。未来的研究方向可能包括进一步优化网络结构、提高模型的训练效率,以及探索更广泛的场景和对象类别适应性。
1941
DPOD:6D姿态物体检测器和细化器
谢尔盖·扎哈罗
夫,
伊万·舒古罗夫,伊万·舒古罗
夫,
斯洛博
丹·伊利克,斯洛博丹·伊利
克,
德国
慕尼黑工业大学
德国
西门子公司技术
sergey. tum.de,ivan. tum.de,slobodan. siemens.com
摘要
在本文中,我们提出了一种新的深度学习方法,用
于从
RGB
图像进行
3D
对象检测和
6D
姿态估计。我们的
方法,命名为
DPOD
(密集姿态对象检测器),估计
密集的多类
2D-3D
之间的输入图像和可用的
3D
模型的
对应映射给定对应性,经由
PnP
和
RANSAC
计算
6DoF
姿态。使用定制的基于深度学习的细化方案来执行初
始姿态估计的附加
RGB
姿态我们的结果和大量相关工
作的比较表明,大量的对应关系是有益的,以获得高
质量的
6D
姿态之前和之后的细化。与其他主要使用真
实数据进行训练并且不对合成渲染进行训练的方法不
同,我们对合成和真实训练数据进行评估,与所有最
近的检测器相比,在虽然精确,所提出的方法仍然是
实时的能力。
1.
介绍
目标检测一直是计算机视觉中的一个重要问题,并
且在过去已经对其进行了大量的研究。这个问题,就
像许多其他视觉问题一样,随着深度学习的出现,见
证了一场彻底的复兴像R-CNN [8]这样的检测器及其后
续的Fast-RCNN [7],Faster-RCNN [28],Mask- RCNN
[9],然后YOLO [27]和SSD [20]标志着这个研究领域具
有出色的性能。所有这些作品都将感兴趣的对象局部
化,在图像中,它们周围都有紧密的约束框。然而,
在许多应用中,例如,增强现实、机器人、机器视觉
等,这是不够的,并且需要全6D姿态。虽然这个问题
在深度图像中更容易解决,但在RGB图像中,由于透
视模糊性,它仍然是相当具有挑战性的
这些作者对这项工作的贡献是相等的
图1:DPOD方法的示例输出:给定单个RGB图像,我
们回归其ID掩码及其2D- 3D对应关系。然后,应用
PSNR +RANSAC来估计最终姿态。绿色边界框显示地
面实况姿态,而蓝色边界框对应于估计姿态。边界框
的几乎完美的重叠指示估计是非常准确的。
以及当从不同视点观看时物体的显著外观变化
最近 基于深度学习的方法,如SSD6D [15],
YOLO6D [33],AAE [31],PoseCNN [34]
和PVNet [25],是目前在RGB图像中执行此任务的最
佳执行者。尽管它们都对LineMOD和OCCLUSION数
据集执行评估,但它们中的每一个都侧重于6D姿态估
计管道的不同方面大多数是在真实数据上训练的[33,
34,25,14],而只有SSD6D [15]和AAE [31]是在syn
上训练
下载后可阅读完整内容,剩余9页未读,立即下载
相关推荐





13 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 支付宝订单监控免签工具:实时监控与信息通知
- 一键永久删除QQ空间说说的绿色软件
- Appleseeds训练营第4周JavaScript练习
- 免费HTML转CHM工具:将网页文档化简成章
- 奇热剧集站SEO优化模板下载
- Python xlrd库:实用指南与Excel文件读取
- Genegraph:通过GraphQL API使用Apache Jena展示RDF基因数据
- CRRedist2008与CRRedist2005压缩包文件对比分析
- SDB交流伺服驱动系统选型指南与性能解析
- Android平台简易PDF阅读器的实现与应用
- Mybatis实现数据库物理分页的插件源码解析
- Docker Swarm实例解析与操作指南
- iOS平台GTMBase64文件的使用及解密
- 实现jQuery自定义右键菜单的代码示例
- PDF处理必备:掌握pdfbox与fontbox jar包
- Java推箱子游戏完整源代码分享
