体素膨胀与RKGA优化:提升3D视图规划在建筑监控中的效率
PDF格式 | 1.79MB |
更新于2025-01-16
| 163 浏览量 | 举报
"《科学直接计算设计与工程》杂志2018年第5期的论文探讨了基于体素膨胀、中间对象和随机密钥遗传算法(RKGA)的视图规划优化问题。该研究聚焦于针对建筑物检查和监控应用的三维(3D)无人机(UAV)视点规划,旨在解决先前方法中存在的局限性,如专为二维(2D)设计、生成次优视图集或只覆盖目标表面部分。
论文首先回顾了传统的视图规划方法,这些方法在处理3D场景时存在不足,例如最优扫描区域方法和基于随机采样的方法,它们可能无法提供全局最优的视点集合。作者提出了一种新颖的两步计算策略,分为以下几个步骤:
1. 体素膨胀:首先,通过对建筑物表面进行体素扩张,构建出一个包含建筑物的子体积,这有助于更全面地考虑目标物体的三维结构。
2. 中间对象(MO)计算:接着,计算该子体积的中间对象,这作为潜在视点的参考点,确保视点能够更好地覆盖建筑物的各个部分。
3. 高斯采样和MO表面:使用高斯采样技术,对围绕MO表面的候选视点进行评估,以便确定可能的观察角度。
4. 优化问题建模:将视点选择问题转化为部分集合覆盖问题,这涉及到如何用最少的视点达到最大的覆盖范围。
5. 随机密钥遗传算法(RKGA)与贪婪搜索:利用RKGA的搜索能力和贪婪搜索的高效性,对候选视点进行优化,以找到接近最优的视点集合。
为了验证新方法的有效性,作者通过一系列的案例分析进行了实验,并对比了新方法与传统方法在视点数量和覆盖效果上的表现。结果显示,新方法在保持较低视点需求的同时,能够实现更高的覆盖率,从而显著改进了视图规划的效率和质量。
这篇论文不仅提出了一个创新的视图规划算法,还展示了其在实际应用场景中的优势,对于提高无人机在建筑物检查和监控中的应用效能具有重要意义。读者可以通过ScienceDirect网站获取全文,该论文遵循CCBY-NC-ND许可协议,允许在特定条件下分享和使用。"
W. Jing
,
K. Shimada
/
Journal of Computational Design and Engineering 5
(
2018
)
337
339
X
ð Þ
ð
2016
年
12
月
2
8
日
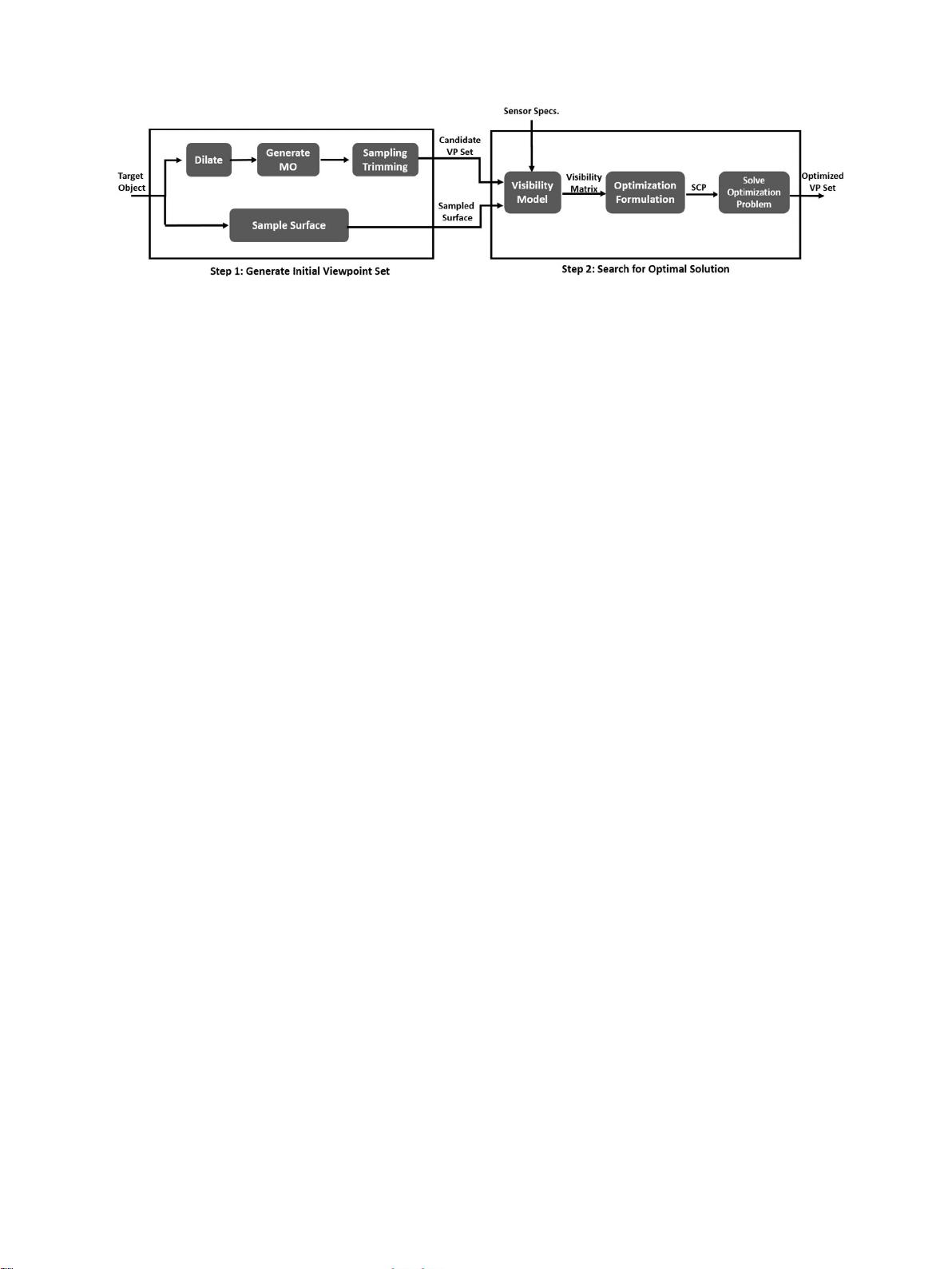
图二、该方法分为两步:第一步寻找一组候选视点,第二步寻找覆盖目标建筑物所有表面的候选视点的最优子集
该方法可能不能在
“
生成
”
步骤中生成合适的候选视点。这是因为以前
的基于随 机抽样的 方法(
Englot Hover
,
2013; Jing
,
Polden
,
Tao
,
Lin
,
Shimada
,
2016
)通常效果更好,但在太空探索方面仍
然不够有效
3.
问题公式化
如图1所示,对于本文所讨论的建筑物检查和监视应用,UAV围绕建
筑物飞行以利用视觉传感器获取建筑物的表面信息。目标是找到传感器
的最小视点集,以便它们完全覆盖目标建筑物的表面。在该应用中,视
觉传感器的6-DOF位置和取向可以通过UAV的运动以及与传感器附接的
平移-倾斜机构来实现。传感器的可见区域由参数、视场(FOV)和景
深指定。目标是城市街区的一组建筑。由于这是一个基于模型的视图规
划问题,我们假设建筑物的形状是已知的,它们被表示为多边形表面补
丁。
我们将我们的视图规划问题公式化为受约束的组合优化问题:
n
min
x
i
x
i
2 f 0
;
1 g
;
1
/1
时间
:
S
¼
[
f
p
i
·
x
i
对于
所有我
,
其中
,
S1/4 =
1
;
s
1
;
...
S
m
m
是目标建筑物的表面块
;n
是候选视点的数目
;
xi
指示候选视点是否应包括在所选择的视点集合中以覆盖目标建筑
物
;xi
1
/4 1
表示包括该视点,而
xi
1
/40
表示不包括该视点
p
i
是位置,
函数f将视点映射到曲面片的集合或S的子集。
Fpi
是根据预定义的可见性
准则定义从视点
pi
可见哪些表面片的映射。例如,如果三个曲面片s
5
、s
6
和s
7
从第三个candi可见
日期视点,则f x
3
s
5
;
s
6
;
s
7
。在这个公式中,目标是找到一组覆盖目标建筑
物的所有表面块的最少视点。
4.
建议的计算方法
在本文中,我们提出了一种新的基于计算模型的视图规划方法,
用于建筑物检查和监控应用。该方法结合了几何方法和组合优化方
法,生成的视图规划结果具有较高的覆盖率和较少的视点,
覆盖要求。该方法首先采用体素膨胀和中间对象(
MO
)两种几何方
法,结合高斯采样方法生成候选视点。第二步从候选视点集合中寻找
近优视点子集,通过建立部分集合覆盖问题(
SCP
)的数学模型,
并采用随机密钥遗传算法和贪婪搜索方法求解
SCP
图
2
总结了所提出
的视图规划方法的过程流程。
与以前的工作相比(
Chen &Li
,
2004; Jing
,
Polden
,
Lin
等
人,
2016
年
;
斯科特,
2009
年),它也利用了两步优化,包括候选视
点的生成和最终视点的选择。如第
4.1
节所述,所提出的方法在视点
生成步骤中使用体素膨胀、
MO
和高斯采样而不是简单的偏移或随机
采样,在第
4.2
节所述的第二步中产生更好的结果。
4.1.
候选视点集
第一步的目的是采样一组具有良好质量的候选视点。跳过这一步
骤并试图直接找到最佳视点集将需要在高维空间中进行优化,这需要
不切实际的高计算成本。预先选择候选视点缩小了搜索空间,并显着
降低了计算成本。
高质量的候选视点应满足以下条件:
候选视点应该具有高覆盖率。这是因为在第二步骤中选择的候选
视点的子集的覆盖率被候选视点的覆盖率封顶。
候选视点应包括可以看到目标建筑物的凹入边缘和拐角的视点。
候选视点的数量应该与曲面片的数量过多的候选视点将导致不必
要的高计算成本,而过少的候选视点将导致低覆盖率和不太理想
的结果。
如图3所示,所提出的方法通过以下方式生成这样的高质量候选视
点:(1)体素化建筑物形状并膨胀体素化的建筑物形状,(2)生成膨
胀体积的MO,(3)去除位于仅由膨胀表面定义的MO子集上的MO
点,以及(4)在MO上使用高斯采样对候选视点进行采样,并使用局部
势场方法生成观看方向。这些步骤的详细说明见第4.1.1
●
●
●
剩余11页未读,继续阅读
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
