手持设备上的快速近场光度立体重建技术
PDF格式 | 20.39MB |
更新于2025-01-16
| 11 浏览量 | 举报
"快速轻量级近场光度立体技术是一种创新的3D物体重建方法,专为在小空间内捕捉大型物体设计。该技术利用iPhone相机和手持手电筒作为光源,通过端到端的学习算法实现高效、精确的重建效果。与传统方法相比,它在推理过程中速度显著提升,能在一秒内在普通GPU上处理高分辨率图像,生成网格,并且对噪声和校准误差具有更好的鲁棒性。
现有的近场光度立体技术依赖于优化过程,这导致计算速度慢且内存需求大。相反,新方法采用递归多分辨率策略,一次性估计整个图像的表面法线和深度图,极大地减少了计算时间和内存消耗。这种方法提高了45倍的速度,同时降低了平均角度误差,从13.3°改进至11.3°,从而提供更准确的重建结果。
该技术的一大亮点是其轻量化特性,允许用户在笔记本电脑上快速处理图像,便于多次重拍,这对于AR/VR应用尤其有价值。此外,尽管最初设计用于校准照明环境,但通过引入校准网络,该方法也能适应非校准的真实世界捕捉场景。
近场光度立体技术相较于远场技术在捕捉大型物体如家具时更具优势,因为它可以更有效地处理近距离照明条件,适合在有限的空间内进行高质量的3D重建。通过这种技术,用户能够在短时间内完成大型物体的精确数字化,为设计、制造、虚拟现实等领域带来便利。"
12612
0
快速轻量级近场光度立体
0
DanielLichy1SoumyadipSengupta2DavidW.Jacobs1
0
1马里兰大学,帕克学院2华盛顿大学
0
dlichy@umd.edu,soumya91@cs.washington.edu,djacobs@cs.umd.edu
0
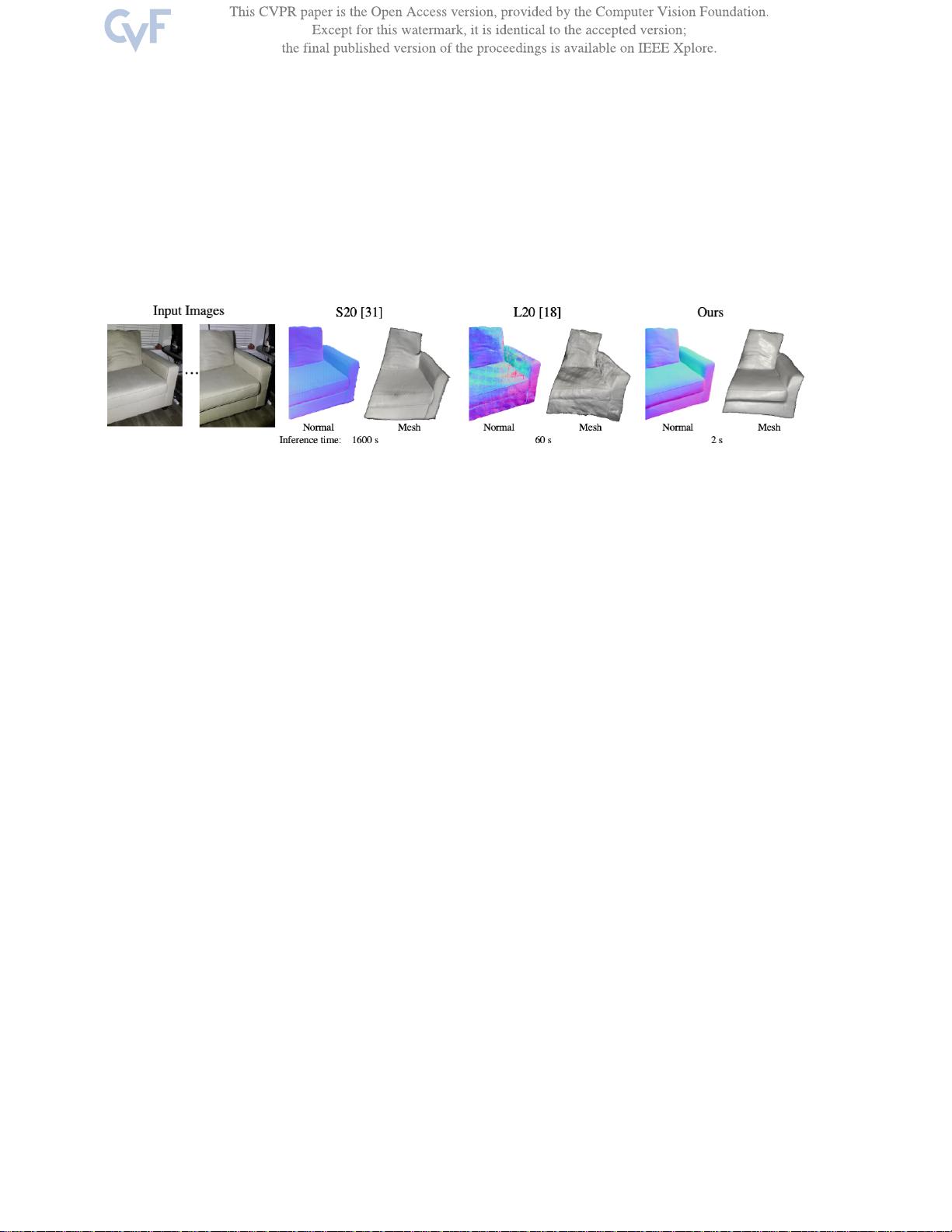
图1.我们提出了一种快速轻量级的解决方案,用于解决近场光度立体(PS),这对于在小封闭空间中捕捉大型物体(例如沙发)特别有用。我
们使用iPhone相机和手持手电筒拍摄物体。我们的方法在推理过程中速度显著提高,并且比现有的方法S20[31]和L20
[18]产生更准确的重建结果。
0
摘要我们介绍了第一个端到端的基于学习的近场光度立体(PS)解决方案,其中光源靠近
感兴趣的物体。这种设置对于重建大型固定物体特别有用。我们的方法快速,能够在一秒
钟内在普通GPU上从52
512×384分辨率的图像中生成网格,因此可能解锁多个AR/VR应用。现有的方法依赖于优
化与远场PS网络耦合,该网络在像素或小块上运行。使用优化使得这些方法速度慢且内存
占用高(需要17GB的GPU和27GB的CPU内存),而仅使用像素或块使其对噪声和校准误
差高度敏感。为了解决这些问题,我们开发了一种递归多分辨率方案,以在每个步骤中估
计整个图像的表面法线和深度图。然后,将每个尺度的预测深度图用于估计下一个尺度的
“每像素照明”。这种设计使我们的方法几乎快45倍,精度提高2°。
0
与使用迭代优化的最先进的近场PS重建技术相比,我们的方
法更准确(11.3°对13.3°的平均角度误差)。1.引言在这项
工作中,我们介绍了一种快速轻量级的近场照明光度立体(
PS)技术。光度立体旨在通过使用静态相机和不同的光源拍
摄的图像序列来重建物体的几何形状。现有的近场PS方法速
度慢且内存占用极高。快速和轻量级的特点使用户能够在几
秒钟内在笔记本电脑上捕捉图像并处理它们,从而允许多次
重拍。
0
如有需要,这种轻量级重建技术对于多个AR/VR应用非常有
用。虽然我们的方法主要用于校准照明,与现有的远场方法
一致,但我们还展示了如何通过引入校准网络将我们的方法
扩展到非校准的真实世界捕捉。
0
近场PS通常比远场或远距离照明的PS更受欢迎,无论是从
实际还是理论上来说都是如此。它非常适用于捕捉大型物体
,例如家具或人类,特别是在像房间这样的封闭空间中[3,
16,
25]。这是因为远场PS方法假设照明是远距离的,例如[33,
34]建议的物体尺寸的10倍,这使得它在许多室内空间中不
适用于3D成像。此外,手持设备上的低强度LED灯(例如手
机上的闪光灯)可能无法从远距离照亮物体[28]。从理论上
讲,在未校准照明的情况下,近场PS与远场PS相比没有线
性模糊,而远场PS存在着众所周知的广义浮雕模糊[4],如[
25]所示。
0
通过放弃传统的优化而采用递归多尺度算法,我们使我们的
方法快速而准确。我们提出的方法由两个递归网络组成,一
个用于预测表面法线,另一个用于深度图。在递归的每一步
中,我们将输入图像的分辨率增加2倍。我们首先通过上采
样前一步的预测深度图来分析估计图像中每个像素的相对照
明方向和衰减因子(称为“每像素照明”),然后根据输入
图像,“每像素照明”和估计的深度图推断该尺度的表面法
线。
下载后可阅读完整内容,剩余9页未读,立即下载
相关推荐





cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 普天身份证阅读器新版二次开发包发布
- C# 实现文件的数据库保存与导出操作
- CkEditor增强功能:轻松实现图片上传
- 掌握DLL注入技术:测试工具使用与探索
- 实现带节假日农历功能的jQuery日历选择器
- Spring循环依赖示例:深入理解与Git代码仓库实践
- ABB PLC液压阀门控制程序开发指南
- 揭秘4核旋风密版626象棋引擎的超牛实力
- HTML5实现的经典游戏:小霸王坦克大战源码分享
- 让Visual Studio兼容APM硬件信息的方法
- Kotlin入门:创建我的第一个应用
- Android语音识别技术研究报告与应用分析
- 掌握JavaScript基础:第8版教程源代码解析
- jQuery制作动态侧面浮动图片广告特效教程
- Android PinView仿支付宝密码输入框源码分析
- HTML5 Canvas制作的围住神经猫游戏源码分享
