实时三维手形网格重建:精确对齐的新方法
7 浏览量
更新于2025-01-16
收藏 1.42MB PDF 举报
三维手形网格实时重建中的精确对齐方法是一项重要的研究课题,尤其在增强现实(AR)领域有着广泛的应用潜力。本文由香港中文大学副校长等人合作提出,他们关注的是如何在满足实时性、准确的手部姿势和形状捕捉以及精细的网格图像对齐这三个关键需求上取得突破。
当前,三维手部网格重建主要依赖于两种输入类型:RGB图像或深度数据。深度学习方法已经成为主流,例如通过深度神经网络预测手部关节坐标,以指导手部网格顶点的位置或驱动手部模型参数,如MANO模型。然而,这些方法往往难以同时实现高精度的手部姿势和形状重建,以及流畅的网格对齐,特别是在实时环境下。
本文的核心贡献在于设计了一个新的流水线架构,将手部网格重建过程分解为三个阶段:关节预测与分割、粗网格生成和精细化网格对齐。首先,通过关节阶段精确捕捉手部关节位置并进行分割;接着,网格阶段生成基础手部网格;最后,通过微调级细化网格对齐,确保在交互式反馈中对手指级细节的准确匹配。精心设计的网络结构和定制的损失函数有助于提升模型性能,使得模型能够在实时环境中提供高质量的预测。
实验结果在多个基准数据集上展示出显著优势,不仅在手部网格和姿态的精度上超越了现有最先进的方法,而且在手图像对齐方面也表现出更高的自然度和真实感。文章通过对比I2L-MeshNet等先前工作,如图1所示,清晰地展示了作者方法在AR交互中的优越性,例如对手指级对齐和手部遮挡的处理能力。
这项研究对于推动计算机视觉技术在AR领域的实际应用具有重要意义,为实现更加自然、流畅的人机交互体验奠定了坚实的基础。通过实时、精确的手部网格重建,该方法有望在游戏、教育、医疗等多个领域开启新的可能性。
11700
X
1D
J
×
图
2.
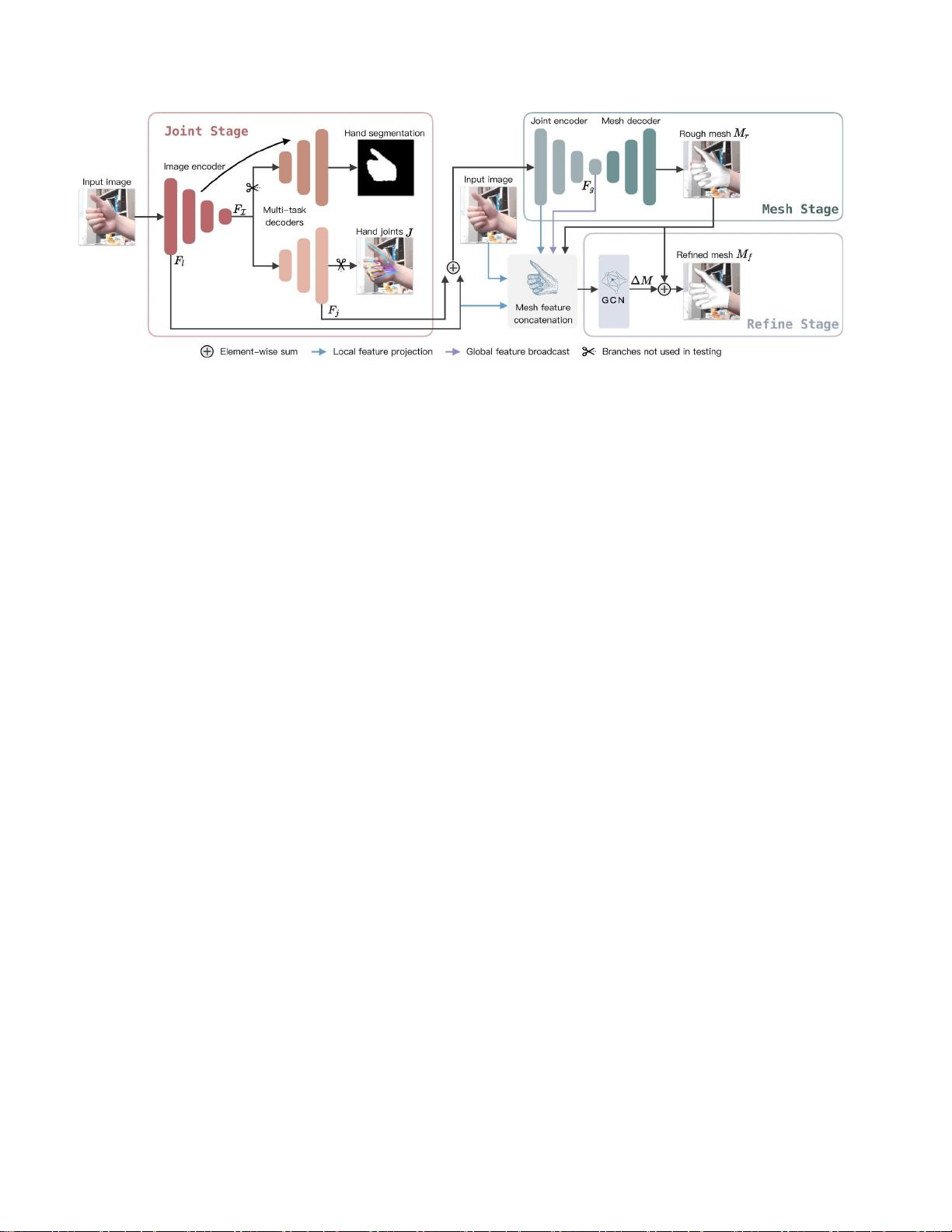
我们计划
的
工作。 根据
用户的手的
输入
图像
,
关节第一文本作用于特征映射
Fi
,并将其发送到两个解码器,一个用于手分割,另一
个用于生成关节特征
Fi
并预测手关节位置
J
。
随后,网格阶段融合
Fj
和来自联合阶段的浅图像特征
Fl
,用于预测粗糙的手网格
Mr
。最
后,我们将来自联合阶段的图像特征
Fl
与联合编码器的浅层和来自网格阶段的全局特征
Fg
聚合,并且将组合特征和粗糙网
格传递到细化阶段中的图卷积层(
GCN
)以回归偏移网格
Δ
M
并产生最终的手网格
Mf
=
Mr
+
∆
M。剪刀图标表示在测试过程中可以切断相应的分支
我们框架中的每个阶段都有一个明确的目标,因此他
们可以
更好地专注于学习相关的功能
,例如,关节阶
段,用于整个手的形状和关节;网格阶段,用于粗糙的
手网格;以及细化阶段,用于学习回归
偏移向量以在图
像空间中将粗糙的网格与用户的手对准
此外,每个阶
段中的网络模型可以保持
小而紧凑,以实现实时性
能
。接下来,我们将详细介绍这三个阶段。
3.1.
联合阶段
给定输入图像,关节级首先使用特征提取器对其进
行编码,然后将编码的特征
FI
馈送
到两个
分支中:
一
个分 支用于 预测 手 关节
,
另
一个
分支用于预测手分
割
。对于手关节分支,我们使用一个特征解码器来生
成关节FEA-
然后回归手关节位置,
即
,手的
21
个
关节的
3D
坐标
(表示为
J
),经由多层卷积层和
soft-argmax [7]
从
Fj
和
Fl
,遵循与
[32]
类似的策略
!
“
J
=
-
a
r
g
m
a
x
(
C
o
n
v
(
a
v
g
x
(
F
)的
s
,
y
编码器以更好地捕获手的精细细节,特别是在边界
处。因此,我们在手部分割的联合阶段引入了另一个
预测头(见图2),其中我们使用U-Net [40]来处理编
码的特征图并预测手部分割。
3.2.
网格阶段
在网格阶段,我们首先通过联合编码器融合来自联
合阶段的联合特征
Fj
和浅图像特征
Fl
注意,我们选择
F
j
而不是J作为输入,因为预测的关节J可能不是高度准
确的,所以它可能误导重建。此外,组合浅特征
Fl
有助
于保留图像特征。然后将融合特征发送到编码器单元
以产生全局网格特征
Fg
。在此之后,我们通过多个扩
张卷积层和soft-argmax从
F
g
回归手部网格
M
r
中
由 于 粗 糙 网 格 是 从 一 个 低 分 辨 率 ( 原 始 的 1/64
1/64)的全局特征恢复的,其中大多数局部特征由于
膨胀的核而丢失,因此
结果大多是平滑的,并且在边界处采样不足
J
y
= soft-arg max
(
Conv
1D
(
avg
#
J
z
=
C
〇
nvlD
(
Φ
(
a
v
g
x
,
y
(
FI
)
,
(
Fj
)
,
(
一
)
因此,粗糙的网格可能无法很好地与用户的手对齐
在输入图像中。然而,这个阶段可以快速生成
其 中 J 中 的 下 标 x 和 y 表 示图 像 空 间 , 并 且 z 表 示 深
度;
Conv
1D
表示1D卷积;Φ表示一个块,它由一个全连
接层、1D批归一化和整形函数组成,整形函数将特征
向量
从
R
C
重新排列到
R
c
′
×
d
,
C
是
特征向量
的通道大
小
;d是
avgx
(
Fl
)的大小;且c
′
= C/d。
考虑到我们需要一个合理的联盟
重建的手网格和用户
在3D中,粗糙的手部网格捕获整体手部形状,而细化
阶段可以通过回归小且易于学习的每个顶点偏移向量
来
3.3.
优化阶段
图2的右下角示出了我们如何残余地细化由先前网
格阶段预测的粗糙网格
Mr
。受文献[25,26,52]的启
剩余13页未读,继续阅读
571 浏览量
2021-09-18 上传
1250 浏览量
2018-11-26 上传
点击了解资源详情
点击了解资源详情
848 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小学水墨风学校网站模板设计
- 深入理解线程池的实现原理与应用
- MSP430编程代码集锦:实用例程源码分享
- 绿色大图幻灯商务响应式企业网站开发源码包
- 深入理解CSS与Web标准的专业解决方案
- Qt/C++集成Google拼音输入法演示Demo
- Apache Hive 0.13.1 版本安装包详解
- 百度地图范围标注技术及应用
- 打造个性化的Windows 8锁屏体验
- Atlantis移动应用开发深度解析
- ASP.NET实验教程:源代码详细解析与实践
- 2012年工业观察杂志完整版
- 全国综合缴费营业厅系统11.5:一站式缴费与运营管理解决方案
- JAVA原生实现HTTP请求的简易指南
- 便携PDF浏览器:随时随地快速查看文档
- VTF格式图片编辑工具:深入起源引擎贴图修改
