ToFu:体采样驱动的拓扑一致多视点人脸建模
PDF格式 | 3.2MB |
更新于2025-01-16
| 95 浏览量 | 举报
"基于体采样的拓扑一致性多视点人脸推断"
本文介绍了一种名为ToFu的新方法,该方法专注于解决多视图人脸建模中的挑战,特别是针对拓扑一致性、高分辨率细节和高质量渲染。传统的高保真面部数字化过程结合了多视图立体(MVS)技术和非刚性配准,但往往需要手动清理和处理极端表情时的配准失败。为了克服这些限制,ToFu引入了一个基于体采样的渐进网格生成网络,它能够从多视图图像中精确预测一致拓扑的面部网格,同时捕捉高分辨率的几何细节。
在技术层面,ToFu的创新之处在于将拓扑结构嵌入到特征量中,通过几何感知的局部特征进行体采样。这种方法允许网络自适应地处理不同面部表情下的复杂几何形状,确保在一致的网格拓扑中实现密集且准确的预测。同时,ToFu还生成位移图以捕获孔隙级别的几何细节,这有助于实现高质量的反照率和镜面反射映射,进而提供逼真的渲染效果。
实验结果表明,ToFu在几何精度和对应准确性方面达到了最先进的水平,而且计算效率极高。只需要0.385秒,就能生成拥有10K顶点的网格,这比传统技术快了三个数量级。这种速度和精度的结合使得ToFu成为专业工作室在创建化身、动画和物理基础皮肤渲染方面的理想工具。
在介绍部分,作者指出尽管有全自动的单视图化身数字化解决方案,但多视图输入仍然是获取高保真度和表面覆盖率的首选方法,特别是在电影、游戏以及需要高精度的消费者应用中。由于多视图数据提供了更好的控制和覆盖范围,因此,开发如ToFu这样的高效方法对于推动面部建模技术的进步至关重要。
总结来说,"基于体采样的拓扑一致性多视点人脸推断"是一种创新的多视图人脸建模框架,通过体采样和特征量嵌入实现拓扑一致的面部网格预测,同时保证了高分辨率细节和高质量渲染。这种方法对于提高面部数字化的效率和准确性具有重大意义,特别适用于需要高保真度数字人的行业。
3826
-
-
i
=1
∈
M
我
{
}
M F
I
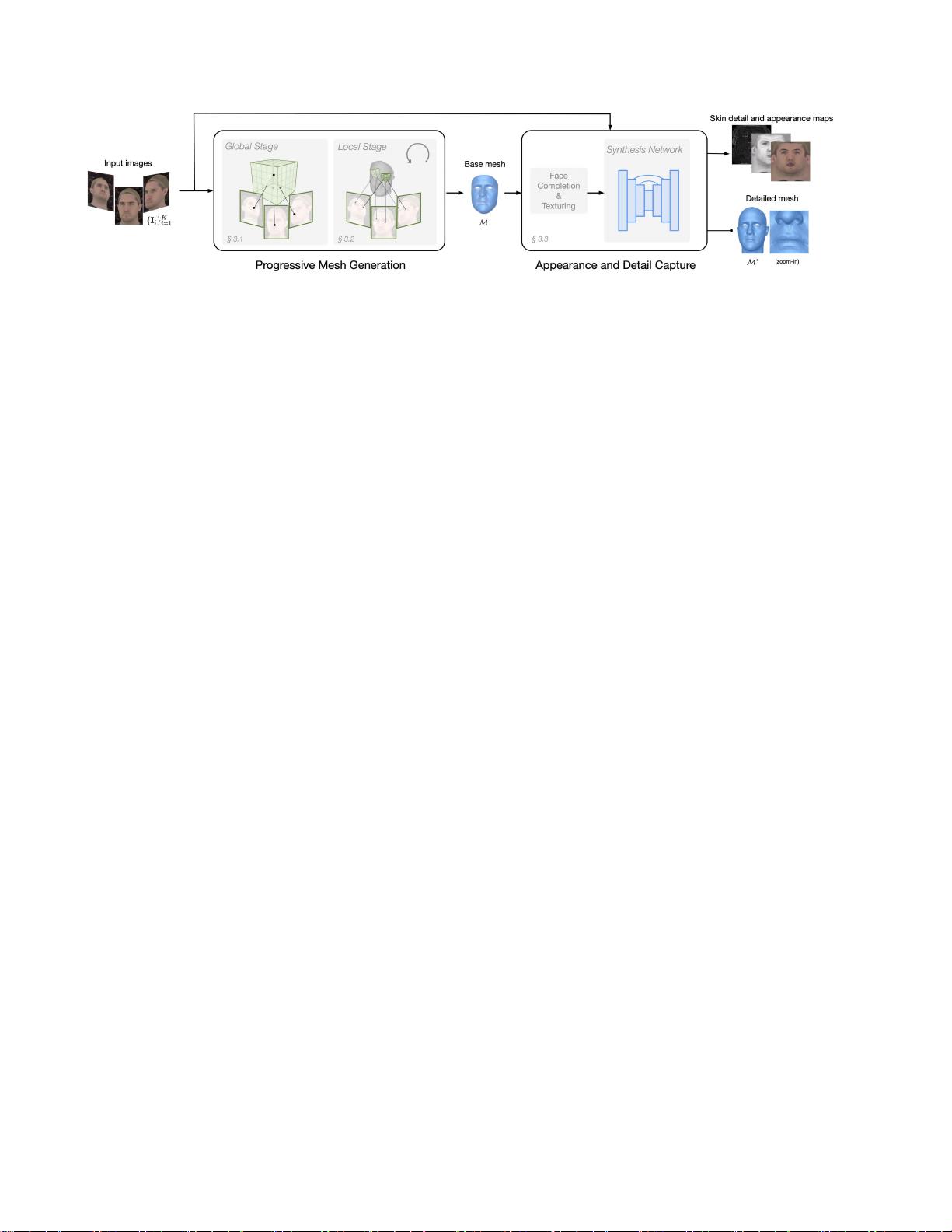
图2:端到端人脸建模系统概述。给定从多视图捕获的图像,渐进式网格生成网络预测一致拓扑结构中的准确面部
网格。然后,外观和细节捕获网络合成高分辨率皮肤细节和属性图,这使得能够实现高度详细的几何形状和照片
般逼真的渲染。
[36],使用统计模型作为正则化器[39],或者以分组方
式联合优化整个数据集的对应关系[12,65]。关于面
部获取和配准的更全面的综述,参见Egger et al.[17 ]第
10段。所有这些配准方法独立于数据采集解决面部对
应。因此,原始扫描数据中的误差传播到配准中。
只有少数方法与我们从校准的多视图输入直接输出
高质量配准的3D面部的方法类似[8,13,14,21]。在
共享一个
3D扫描[49]。这并不奇怪,因为从单个图像推断3D几
何形状是一个不适定问题,这是由于焦距、比例和形
状的固有模糊性[5],因为在透视投影下,不同的形状
会导致不同的物体-相机距离的相同图像。相反,我们
的方法利用显式校准的多视图信息来重建度量准确的
3D几何形状。
3.
多视点人脸推理
类似的目标,我们的方法超越了这些方法
如图
2
,给定图像
{I
}
K
在
K
视图中
几种重要的方式。 与我们的方法不同,
利用已知的摄像机校准
i
i
=1
K
校准的多视图图像序列输入包含多个优化步骤(例
如 , 用 于 构 建 对 象 特 定 模 板 [21] 或 锚 定 框 架 网 格
[8]),并且在计算上缓慢(例如,粗网格重建每帧25
分钟[21])。ToFu替代地将经校准的多视图图像作为
输入(即,静态),并直接输出-以密集顶点对应的方
式输出高质量网格,
0的情况
。
385秒。无论如何,我们的方法对于序列输
入实现了稳定的重建和配准结果。
基于模型的重建。大量的工作旨在从无约束的图像或
单目视频重建3D人脸。为了限制问题,大多数方法估
计基于优化的统计3D变形模型(3DMM)的系数[1,
6,10,11,57]或
基于学习的框架[15,19,22,45,49,56,58]。由
于使用过度简化的、主要是线性的统计模型,重建的
网格仅捕获粗略的几何形状,而丢失了细微的细节为
了更好地生成无约束条件,[53,59]联合学习3D先验
并从图像重建3D面部虽然单目重建方法可以提供视觉
上可应用的3D面部重建,但是它们的精度和质量不适
合于需要度量精确的几何形状的应用。最近发表的工
作表明,现有的最先进的单眼3D人脸重建在度量上比
静态模型平均人脸更差或仅稍微好一点,当与地面实
况相比时
P
i
i
=1
,
一起表示为
=
I
i
,
P
i
K
,
ToFu
的目标是双重的:(
1
)重新
在艺术家设计的拓扑中构建精确的
基础网格
形式上,
输出基网格包含一个顶点列表V R
N×3
和一个固定的三
角剖分T。要求基础网格(1)紧密地配合面部表面,
(2)共享共同的艺术家设计的网格拓扑,其中每个顶
点跨所有网格编码相同的语义解释,以及(3)具有足
够的三角形或四边形密度(其中N >104个顶点)。
密集网格预测的关键是由粗到细的网络架构,如
图所示。
3.
第三章。期望的语义网格对应自然地嵌
入在分层架构中。基于此,通过以下两个阶段推断
几何学:(
1
)粗网格预测
0
,
由全局级
V
0
=
g
()
;
以及(
2
)迭代地上采样并细化到更密集的网
格
{
M1
,
M2
,
…
M
L
}
,
通过局部级
V
k
+1
=
Fl
(
I
,
Vk
)
。
Ml
是基础网格
M
的
最终
预测。
从概念上讲,全局阶段模仿基于学习的MVS,而局
部阶段提供与传统的两种方法相比,我们的两个步骤
在一个固定的拓扑结构中共享一致的对应关系,并使
用体积特征进行几何推断和表面细化。
剩余12页未读,继续阅读
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
