USIP:3D点云中的无监督稳定兴趣点检测
128 浏览量
更新于2025-01-16
收藏 1.67MB PDF 举报
"USIP是无监督稳定兴趣点检测器,专为3D点云设计,能够在各种变换下检测出高度可重复和精确的关键点,无需任何地面实况训练数据。该检测器由特征建议网络构成,通过学习点云的稳定关键点及随机生成的变换对。USIP使用概率倒角损失来提升关键点的可重复性和定位精度。广泛的实验验证了其在模拟和真实3D点云数据集上的优越性能,适用于几何配准、SLAM、3D对象识别等任务。与2D图像的关键点检测相比,3D点云的检测更具挑战性,因为手工制作的检测器较少且效果有限。USIP的代码可在项目网站获取。"
在计算机视觉和机器人领域,3D兴趣点检测是不可或缺的一部分,尤其是在使用3D点云作为数据结构时。USIP检测器解决了这个领域的关键问题,即在SE(3)变换下的稳定性,这对于诸如几何配准、SLAM(Simultaneous Localization and Mapping)和3D对象识别等应用至关重要。USIP通过特征建议网络学习点云中的稳定关键点,同时训练网络适应不同的变换对,以增强关键点的不变性。
为了解决传统手工制作检测器在3D点云处理上的局限性,USIP采取了无监督学习的方法,无需特定环境的标注数据,这意味着它可以应用于各种未见过的场景。通过引入概率倒角损失,USIP确保了检测到的关键点不仅在多个视图之间有高可重复性,而且在定位精度上也有显著提升,这对于保持关键点的匹配一致性至关重要。
在实验部分,USIP在多种数据集上展示了其优秀性能,包括基于激光雷达、RGB-D传感器和CAD模型的点云数据。与现有的手工制作和深度学习的3D关键点检测方法相比,USIP在可重复性和定位准确性上表现出色,表明其在实际应用中的潜力。
此外,USIP的作者还进行了简并性分析,以防止可能影响检测器性能的问题,并提供了相应的解决方案。这一分析确保了USIP在面对各种复杂情况时的稳健性。
USIP是3D点云处理领域的一个突破,为无监督学习的3D关键点检测提供了新的视角。通过克服手工制作检测器的限制,USIP能够处理变换中的3D点云,有望推动计算机视觉和机器人技术的进步。用户可以通过项目网站获取相关的代码,以便在自己的研究或应用中使用。
363
J
J
J
1
(一)
(b)
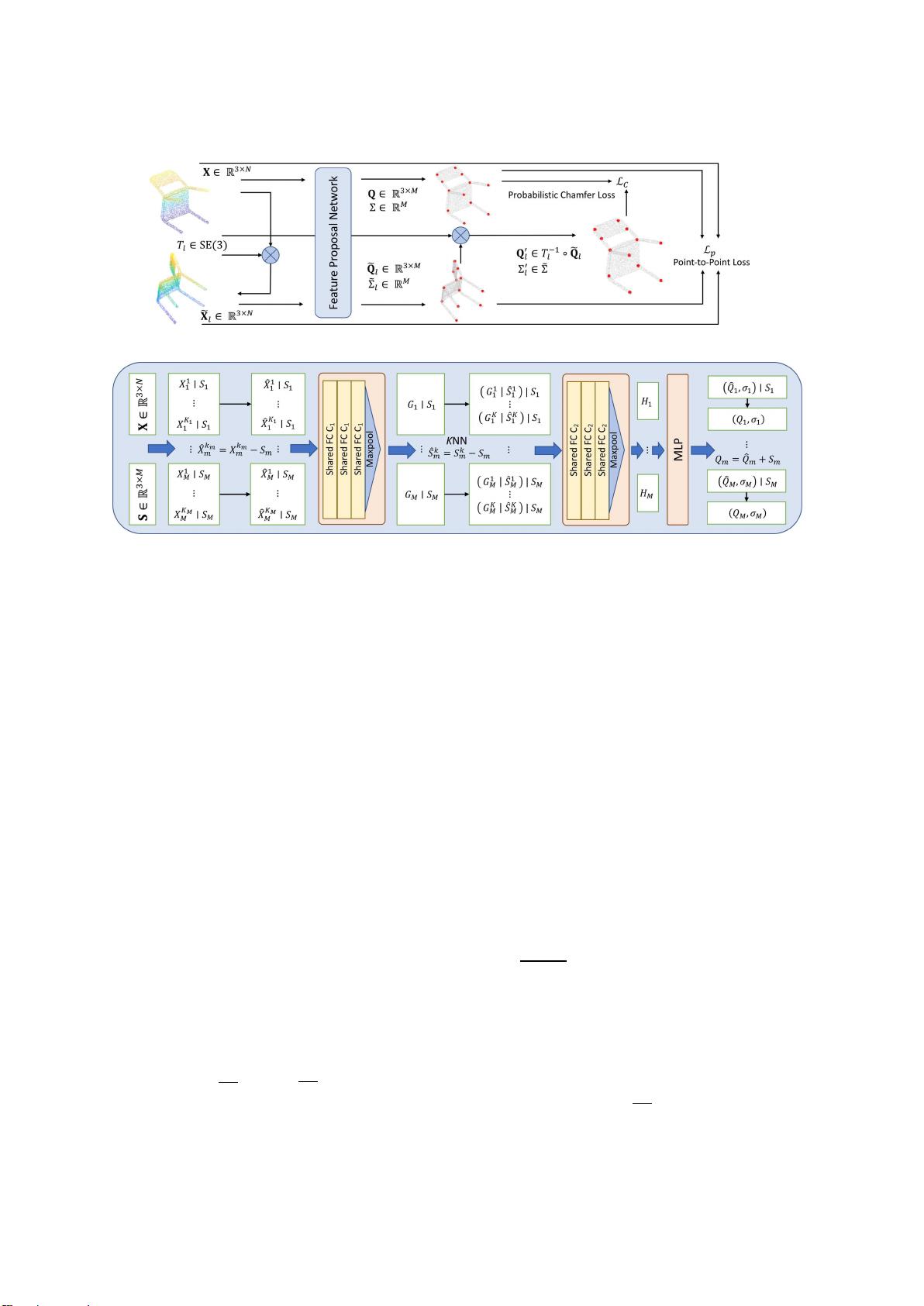
图
2.
(
a
)
USIP
探测器的培训管道(
b
)我们的功能建议网络(
FPN
)的架构更多详情请参见正文
估计的关键点到点云中它们各自的最近邻居的距离
λ
是调整
Lc
和
Lp
对总损失的相对贡献
p
(
d
ij
|
σ i
(
j
)
是一个有效的概率分布,因为它积分为
1。建议key之间的较短距离
d
ij
点
Q
i
和
Q
J
给出了
Q
i
和
Q
J
J J
概率倒角损失最小化Q和Q
J
之间的距离的简单方法
是使用倒角损失:
是点云X和X中高度可重复且精确定位的关键点
。假设
对于所有
d
ij
∈
Dij
,
i.i.d,
Q
和Q
J
之间的联合分布
Σ
M
Σ
M
min
Q
i
−
Q
J
2
+
min
Q
i
−QJ
2
,
(
1)
�
M
p
(
D
ij
|
Σ
i j
)
=
p
(
d
ij
|
σ
i j
)
。
(三
)
i
=1
�
P
于
我
�
�
J
2
j
=1
Q
i
∈
Q
j
i
=1
其最小化一个点云中的每个点与另一个点云中的其最近
邻居的距离。然而,
M
提案并不同样突出。点
Q
的接收
场
可以是无特征表面,因为接收场可以
重要的是要注意,当交换点云的顺序时,概率分布是不
对称的
即
,由于最近邻的不同
即
,
d
ij
∈
=
d
j
i
和
σ
ij
σ
j
i
。因此,联合分布
我
场
被限制为小体积。在这种情况下,强制FPN最小化
Q
i
和
Q
J
,其中
Q
J
是
Q
i
在Q
J
中的最近邻居。
J
和Q之间的关系由下式给出
�
M
p
(
D
j
i
|
Σ
j
i
)
=
p
(
d
j
i
|
σ
j
i
)
,
其中
J J
为了缓解上述问题,我们设计了FPN来学习提案的显
著性不确定
性
J
σ
ji
=
σ
J
+σ
i
j
=1
>
0
,
d
j
i
=
min
<$
Q
i
−
Q
J
<$2
≥
0
。
(四
)
关键点Q和Q
具有概率性倒角损失
L
c
。
2
Q
i
∈
Q
j
特别地,我们建议用指数公式化
L
c
分布,其测量具有显著性不确定性
Σ
和Σ
J
的Q和Q
J
之
间的概率距离。更正式地说,
Q
i
和
最后,QJ和Q之间的概率倒角损失
L
c
由等式中定义
的联合分布的负对数似然给出。3和4:
对于
i
=
1
,
···
,
M
,
Q
J
�
p
(
d
|
σ )
=
exp
—
国
际
新
闻
报
Σ
得双曲
余切
值.
L
c
=
Σ
M
Σ
M
-
ln
p
(
d
ij
|
σ
i j
)
+
i
=1
j
=1
—
ln
p
(
d
j
i
|
σ
j
i
)
ijij
σ
i
+
σ
J
σ
ij
σ
ij
(二)
�
系
我
��
=
ln
σ
ij
+
国
际
新
闻报
Σ
Σ
M
+
�
l
n
σ
j
i
+
2
剩余12页未读,继续阅读
257 浏览量
2024-10-15 上传
2021-04-03 上传
391 浏览量
2022-09-22 上传
2009-05-06 上传
2022-09-19 上传
2013-12-12 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Saber仿真下的简化Buck环路分析与TDsa扫频
- Spring框架下使用FreeMarker发邮件实例解析
- Cocos2d捕鱼达人路线编辑器开发指南
- 深入解析CSS Flex布局与特性的应用
- 小学生加减法题库自动生成软件介绍
- JS颜色选择器示例:跨浏览器兼容性
- ios-fingerprinter:自动化匹配iOS配置文件与.p12证书
- 掌握移动Web前端高效开发技术要点
- 解决VS中OpenGL程序缺失GL/glut.h文件问题
- 快速掌握POI技术,轻松编辑Excel文件
- 实用ASCII码转换工具:轻松实现数制转换与查询
- Oracle ODBC补丁解决数据源配置问题
- C#集成连接器的开发与应用
- 电子书制作教程:你的文档整理助手
- OpenStack计费监控:使用collectd插件收集统计信息
- 深入理解SQL Server 2008 Reporting Services
