不同极数自激发电机并联运行的稳态分析与实验验证
PDF格式 | 2.12MB |
更新于2025-01-16
| 105 浏览量 | 举报
本文主要探讨了不同极数的自激感应发电机(Self-Excited Induction Generators, SEIG)在并联运行时的稳态性能分析和实验验证。研究由沙特国王大学工程学院电气工程系的学者进行,旨在解决在实际电力系统扩展和可再生能源集成中可能遇到的问题,即不同极数发电机并联运行的情况。
文章首先介绍了自励感应发电机在独立和并网应用中的重要性,特别是在高电力需求和可再生能源利用背景下。SEIG因其结构简单、低维护成本和良好的适应性而受到青睐。然而,现有研究大多假设并联运行的发电机具有相同的磁极数量,这并不符合实际情况。
本文对这一假设进行了挑战,通过数学推导建立了考虑不同极数的SEIG并联运行的等效电路模型。该模型不仅适用于不同极数的发电机,也适用于相同极数的情况。通过对稳态性能的分析,作者证明了不同极数SEIG并联运行的可行性,并详细阐述了在各种条件下的系统表现。
为了验证理论分析,作者进行了实验研究,实验结果与理论计算值有良好的一致性。这表明提出的模型和分析方法是准确可靠的,为SEIG的实际应用和与可再生能源系统的集成提供了重要的理论基础。
这篇论文深入研究了不同极数SEIG并联运行的稳态性能,为这一领域的研究开辟了新的视角。通过这种深入理解,工程师和研究人员可以更好地设计和优化电力系统,尤其是在整合风能、微型水力发电等可再生能源时,确保系统的稳定性和效率。该研究成果对于推动自励感应发电机的广泛应用具有重要意义,同时也为未来的研究提供了有价值的参考。
S. Al-Senaidi
,
A. Alolah
和
M.
阿尔坎哈
尔
工程科学与技术,国际期刊
25
(
2022
)
100988
3
1/4
i
F
最小化分为两步。然后获得第一个未知数(频率,
F
)的值,其他期
望的未知数为
测定 第二种方法是基于多变量最小-
频率
F
和速度
u
i
,为了方便和简单,考虑极点的数量。
p.u.
中的极数。
是
mization优化器,同时发现所有未知数。 在[27]中,遗传算法也被
用于并行
w
2
P
i
2P
b
ð
1
Þ
以向由静态负载和动态负载组成的公共负载供电。
GA
用于确定励磁
电容的值该模型还确定了并联运行的单个
SEIG
的转子速度上限和下
限 。 然 而 , 在
[28]
中 , 另 一 个 报 告 是 关 于 使 用 遗 传 算 法 方 法
(
GAA
)来确定并联连接的任何数量的
SEIG
的稳态性能它的结论
是,
GAA
是非常有效的估计产生的电压和这一说法得到了实验结果
的支持在
[29]
中报告了并联运行并为单相负载供电的三相
SEIG
,其
中使用多目标遗传算法确定系统
其中
w
i
是每单位极点数,(
2P
)
i
是
G
i
的极点数,(
2P
)
b
是极点基
数。
如下文附录所示,感应发电机的滑差由下式给出:
s
i 1
/
4
。
F
-
w
i
u
i
2
其中
F=f
g
/f
b
是每单位频率,
u
i
=n
i
/n
b
是每单位速度,
f
g
是以
Hz
为单
位的生成电压频率,
f
b
是以
Hz
为单位的基本频率,
n
i
是以
rpm
为单位
的
G
i
的转子速度,并且
n
b
是以
rpm
为单位的
使用(2),图3电路中的转子电阻系数可以重写为
(MOGA)。使用MOGA通过最小化
等效电路的阻抗。的等效电路
R
ri
=
F
s
R
ri
¼
F
F-
带
U
R
ri
¼
F-
带
U
ð
3
Þ
IM
在
[30]
中用于分析稳态性能
并联的两个
SEIG
该模型使
perfor-
曼斯和负载分配功能进行计算,因
为机器受到略有不同的轴速度。迄今为止,所有关于
SEIG
并联运行
的研究都集中在隐式等极假设下的三相
SEIG
据作者所
因此,这项工作是第一个系列的并行操作的
SEIG
的,与不同数量
的极。给出了系统的基本的操作的可行性,并概述了在不同条件下的
性能结果。通过实验验证了分析的正确性
I
.
我
爱
你 我
从(3),图3被重绘为图4。此外,转子电路的并联支路集中在等效
阻抗中,
Z
mri
<$Z
mi
==Z
ri
<$RmrijX
mri
4
其中
Z
mi
= j X
mi
,并且
Z
ri
=
(
R
ri
/
(
F
-
我
u
i
))
+j X
ri
.
端电压对于
所有发电机是共同的,即,
V
o
/F=V
oi
/F,由下式给出:
V
o
=F<$jZ
1
I
s
1
j <$$>··<$jZ
i
I
si
j <$$>··<$jZ
n
I
sn
j
5
其中
Z
i
= Z
si
+ Z
mri
,并且
Z
si
= R
si
/F + jX
si
(
i = 1
,
2
,.. . ,
n
)。每台电机的定子电流
I
si
(以
V
o
和
E
gi
表示)为
结果表明,良好的协议与计算结果。这
我
V
o
=F
E
gi
=F
研究预计将有助于SEIG的应用及其与可再生能源的整合。最后,对未
来的研究方向进行了展望
硅
化物
Z
i
公 司
简介
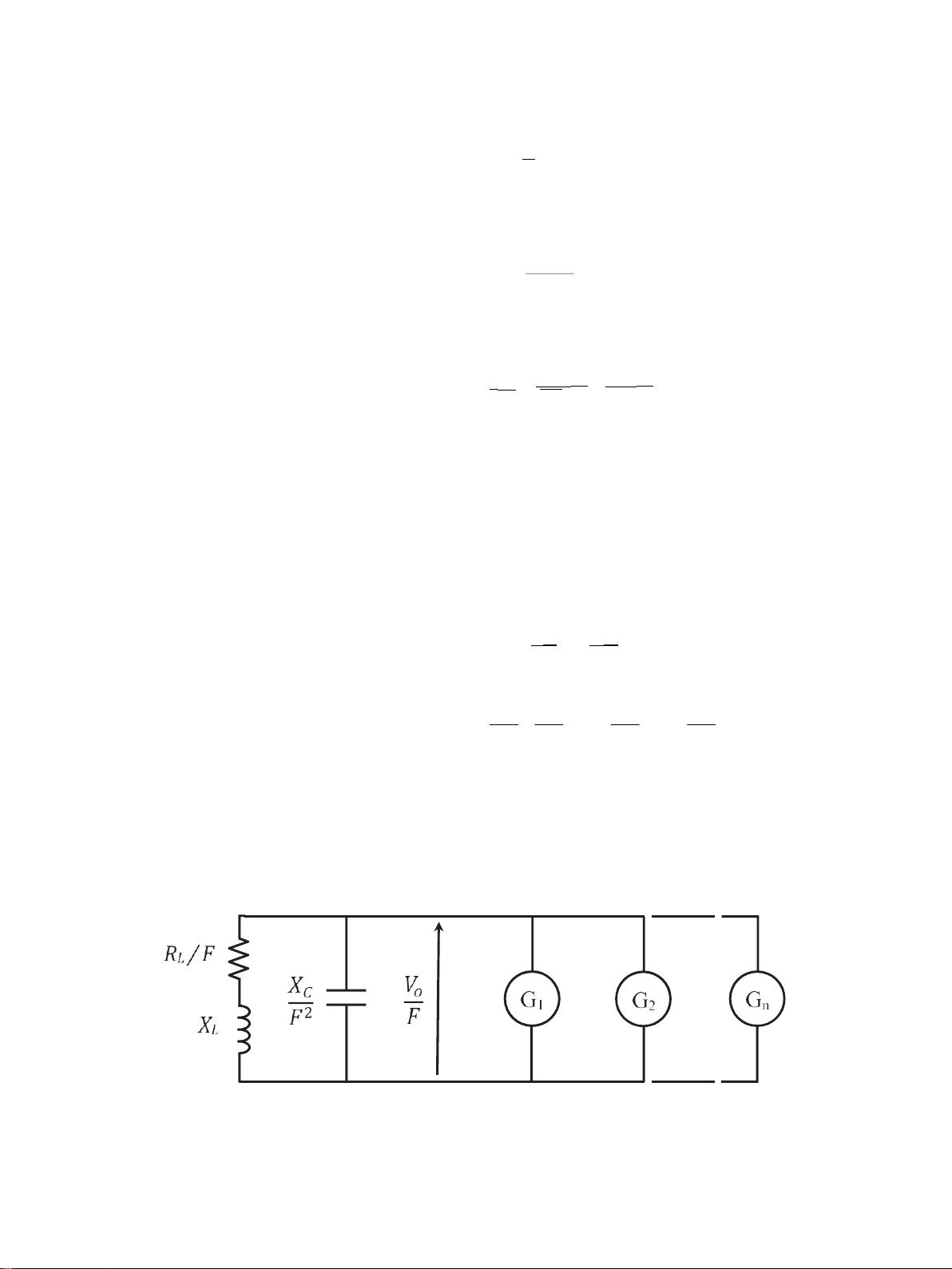
根据
KCL
,图
4
的电路中的节点
a
的所有电流之和等于零,即,
2.
分析
V
o
=F
Z
0
þ
V
o
=F
Z
1
þ· · ·þ
V
o
=F
Z
i
þ· · ·þ
V
o
=F
Z
n
¼
0
ð
7
Þ
所研究的系统是n个并联感应发电机的组合,具有不同数量的极点,
连接到负载和励磁电容,如图2所示。每个
第
i个感应发电机,G
i
,以其每
单位速度u
i
驱动,其中i= 1,2,n。每个发电机的等效电路根据其极数
进行修改。每个G
i
的等效电路如图3所示。电机中谐波和磁芯损耗的影
响被忽略[11]。
因为转子电路在转子电阻的分母中有一个转差
si
,所以它必须用每
单位
free
表示
其中
Z
0
=
ZL
//
Zc
,
ZL
=
RL
/F+
jXL
和
Zc
=
-
jXc
/
F2
。将(
7
)除以(
Vo
/F
)
得到
Y
t
<$Y
0
Y
1
Y
2
···Y
i
···Y
n
<
$0 8
其中
Y
0
= 1/Z
0
,
Y
i
= 1/Z
i
(
i = 1
,
2
,.. . ,
n
),
Y
t
是总导纳。
根据(
8
),
Yt
的实部和虚部都等于零,即,
保留
时间
t
≤
0
图二
. n
台
感应电机并联系统
剩余10页未读,继续阅读
相关推荐






cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现程序A的监控启动机制
- Delphi与C#交互加密解密技术实现与源码分析
- 高效财务发票管理软件
- VC6.0编程实现删除磁盘空白文件夹工具
- w5x00-master.zip压缩包解析:W5200/W5500系列Linux驱动程序
- 数字通信经典教材第五版及其答案分享
- Extjs多表头设计与实现技巧
- VBA压缩包子技术未来展望
- 精选多类型导航菜单,总有您钟爱的一款
- 局域网聊天新途径:Android平台UDP技术实现
- 深入浅出神经网络模式识别与实践教程
- Junit测试实例分享:纯Java与SSH框架案例
- jquery xslider插件实现图片的流畅自动及按钮控制滚动
- MVC架构下的图书馆管理系统开发指南
- 里昂理工学院RecruteSup项目:第5年实践与Java技术整合
- iOS 13.2真机调试包使用指南及安装
