




基于贝叶斯理论的深度图像先验
65 浏览量
更新于2025-01-16
收藏 1.43MB PDF 举报

5443
基于贝叶斯理论的深度图像先验
泽洲程Matheus Gadelha Subhransu Maji Daniel Sheldon马萨诸塞大学
阿默斯特
{zezhoucheng,mgadelha,smaji,sheldon}@ cs.umass.edu
摘要
深度图像先验
[26]
最近被引入作为自然图像的先
验。它将图像表示为具有随机输入的卷积网络的输
出。对于
“
推理
”
,执行梯度下降来调整网络参数,以
使输出与观测值匹配。这种方法在一系列图像重建任
务上产生良好的性能我们证明了当网络每层的通道数
趋于无穷大时,深度图像先验在极限下渐近等价于平
稳高斯过程先验,这为贝叶斯推理方法提供了信息。
我们表明,通过使用随机梯度
Langevin
动力学进行后
验推理,我们避免了早期停止的需要,这是当前方法
的一个缺点,并改善了去噪和修复任务的结果。我们
在一些
1D
和
2D
信号重建任务上说明了这些直觉。
1.
介绍
众所周知,在大型数据集上训练的深度卷积网络令
人惊讶的是,一些工作已经表明,具有
随机
参数的卷
积网络也可以编码非平凡的图像属性。例如,随机卷
积网络的滤波器响应的二阶统计对于风格转移和合成
任务是有效的[27]。在小数据集上,从随机卷积网络
中提取的特征可以像训练的网络一样工作[24]。沿着
这些思路,Ulyanov等人提出的[26]表明,在随机输入
上适当设计的卷积网络的输出往往是平滑的,并引起
自然图像先验,因此可以通过梯度下降来代替对自然
图像的搜索,以找到网络参数和输入,从而最小化网
络输出的重建误差
代 码 和 补 充 材 料 可 在 https :
people.cs.umass.edu/
zezhoucheng
/gp-dip上获得
值得注意的是,不需要事先训练,该方法通过随机初
始化参数来操作。
我们的工作提供了一种新的贝叶斯观点的深度图像
先验。我们证明了具有随机参数的卷积网络对平稳输
入进行操作,
例如
,白噪声,当每一层中的信道数趋
于无穷大时,接近具有极限中的
静止核
的二维高斯过
程(GP)(定理1)。虽然之前的工作[19,31,18,
3,20]已经研究了无限宽网络和卷积网络的GP行为,
但我们的工作是第一次分析卷积网络在固定输入上引
起的空间我们分析得出的内核作为一个函数的网络架
构和输入分布的特征卷积,非线性,上采样,下采
样,和跳过连接的空间协方差的影响。这些见解可以
为设计1D或2D先验的网络架构的选择提供信息。
然后,我们使用贝叶斯的角度来解决目前的深度图
像先验估计技术的缺点。从单个图像估计深度网络中
的参数会带来巨大的过拟合风险。在以前的工作中,
作者依靠早期停止来避免这种情况。贝叶斯推理提供
了一种原则性的方法来避免过度拟合,通过在参数上
添加合适的先验,然后使用后验分布来量化不确定
性。然而,深度网络的后验推理是具有挑战性的。一
种选择是计算极限GP的后验。对于具有足够通道的小
型网络,我们表明这与深度图像先验非常匹配,但计
算成本很高。相反,我们基于随机梯度朗之万动力学
(SGLD)[28]进行后验采样,这在理论上是有根据
的,在计算上是有效的,因为它是基于标准梯度下降
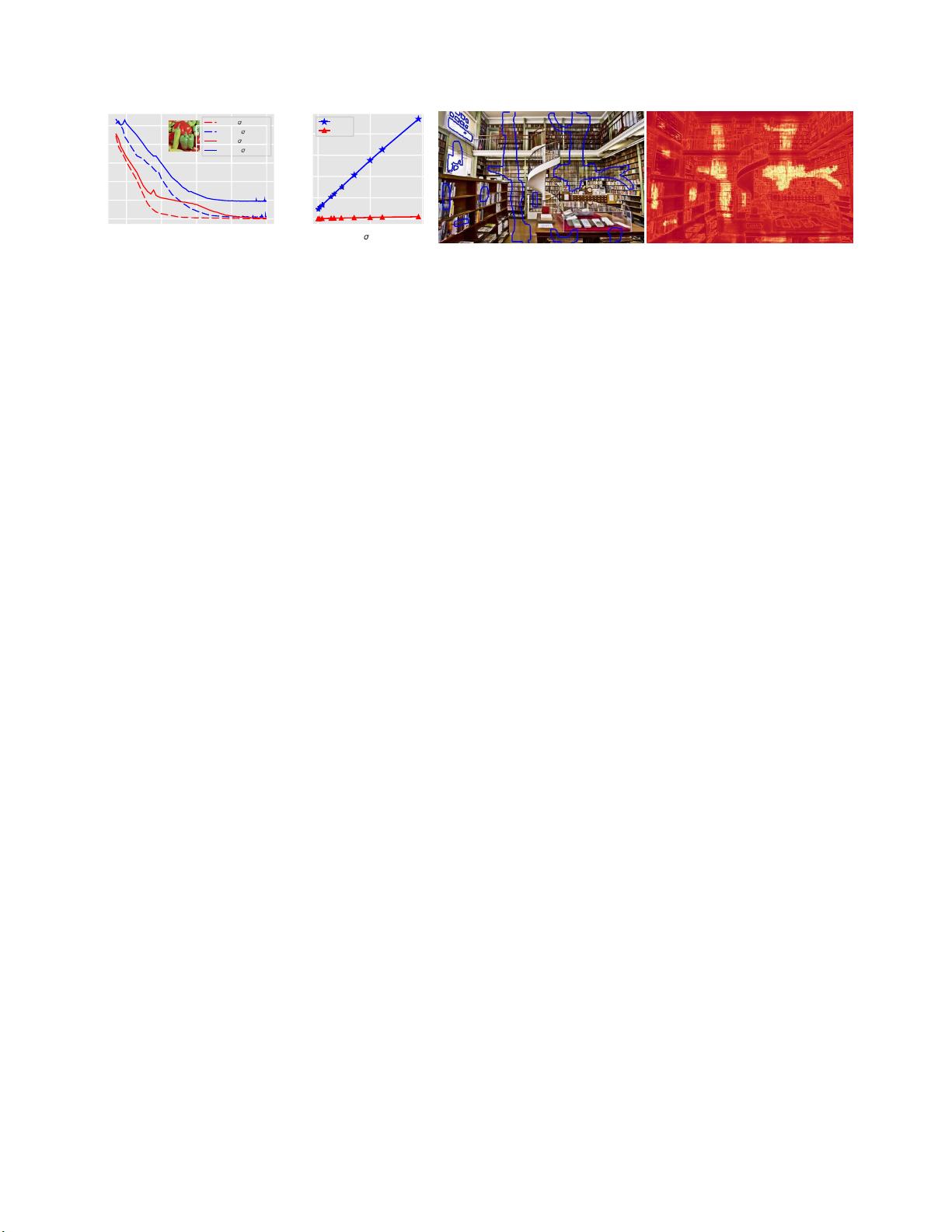
的。我们表明,使用SGLD的后验采样避免了提前停止
的需要,并且在图像去噪和修复任务上比香草梯度下
降更好(见图1)。它还允许我们系统地计算估计的方
差,作为不确定性的度量我们说明了这些想法上的一
些1D和2D重建任务。

剩余10页未读,继续阅读
查看更多
2021-09-19 上传
2021-08-11 上传
2024-06-16 上传
146 浏览量
2022-10-26 上传
121 浏览量
238 浏览量
2021-10-01 上传

cpongm
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- CoffeeCup免费HTML编辑器v9.7:网页设计必备工具
- Java实现求100以内偶数和的编程示例
- 掌握LSTM进行时间序列预测的完整代码解析
- WebRTC实现纯网页录音功能及其上传教程
- 深入探索WPF与Blend for Visual Studio界面设计
- Android素材底栏库:ReadableBottomBar详细介绍与使用
- React-titles组件集合: 动画化网络文章标题的实现
- tinydom:轻量级Go语言XML DOM解析与操作库
- 一分钟搞定Server酱,实现微信即时推送通知
- Adobe CS3中文版三剑客全套下载安装指南
- 易语言API查询功能源码解析与应用
- Java实现求解100内偶数和的简单代码
- XQuery资源精选:助力XQuery学习与应用
- SpringBoot整合Axis开发WebService实例解析
- 使用Gin和React实现的个人博客系统逐步完善
- Next.js项目启动和部署指南





















