几何感知对称域自适应单目深度估计新方法
139 浏览量
更新于2025-01-16
收藏 12.57MB PDF 举报
"基于几何感知的对称域自适应单目深度估计"
在计算机视觉领域,单目深度估计是一项重要的技术,它旨在从单张图像中推断出场景的三维深度信息。随着深度学习的发展,尤其是深度卷积神经网络(DCNNs)的应用,单目深度估计的准确度有了显著提升。然而,依赖于带有地面真实深度标签的大量训练数据是这些模型的一大挑战,而这样的数据通常获取困难且成本高昂。
为了解决这一问题,研究者们转向了无监督学习方法,如利用几何线索来训练深度估计网络。尽管这些方法可以避免依赖真实深度标签,但它们的性能往往受光照变化、遮挡和图像模糊等因素的影响,不如有监督学习稳定。因此,一种新的策略是利用域适应技术,从具有深度标签的合成图像中迁移知识到真实世界的数据。
本文提出的“基于几何感知的对称域自适应框架”(GASDA)正是针对这一问题的解决方案。GASDA强调了目标域(真实数据)中自然图像的几何结构对于高性能深度预测的重要性。该框架同时利用了合成数据的深度标签和真实数据中的极线几何信息,这是一种几何感知的策略。通过在端到端网络中采用对称训练,GASDA不仅优化了图像风格转换,还能生成更高质量的深度图。
实验结果显示,GASDA方法的有效性,并且与现有的先进方法相比具有竞争力。这种创新的域适应策略为深度估计提供了一个新的视角,特别是在处理真实世界数据时,能够更好地应对光照、遮挡等复杂条件,提高了深度预测的鲁棒性。
该研究的贡献在于:
1. 提出了一种几何感知的对称域自适应方法,结合了合成数据的标签信息和真实数据的几何特性。
2. 设计了端到端的网络结构,包括两个图像风格转换器和一个深度估计器,通过对称训练实现更好的图像转换和深度生成。
3. 实验验证了GASDA在无监督深度估计上的优越性能,与当前最佳方法相比表现优秀。
GASDA为单目深度估计提供了一个新的范例,特别是在利用合成数据进行域适应时,如何更好地捕捉和利用真实数据的几何特性。这种方法对于推动无监督深度估计技术的进步具有重要意义,并且其代码公开,有助于其他研究者在此基础上进行进一步的研究和开发。
S
T
DMDE
T2S
AL
F
S
T
F
AL
DMDE
AdaDepth [26]
S
T
S2T
AL
F
F
AL
DMDE
T2Net [59]
S
T
S2T
AL
T2S
D
MDE
D
MDE
AL
GASDA
3.2. GASDA
L
g a n
(G
s2t
, D
t
, X
t
, X
s
) =E
x
t
∼X
t
[D
t
(x
t
) − 1]+
E
x
s
∼X
s
[D
t
(G
s2t
(x
s
))],
L
g a n
(G
t2s
, D
s
, X
t
, X
s
) =E
x
s
∼X
s
[D
s
(x
s
) − 1]+
E
x
t
∼X
t
[D
s
(G
t2s
(x
t
))].
(1)
L
cyc
(G
t2s
, G
s2t
) = E
x
s
∼X
s
[||G
t2s
(G
s2t
(x
s
)) − x
s
||
1
]
9790
0
基础
0
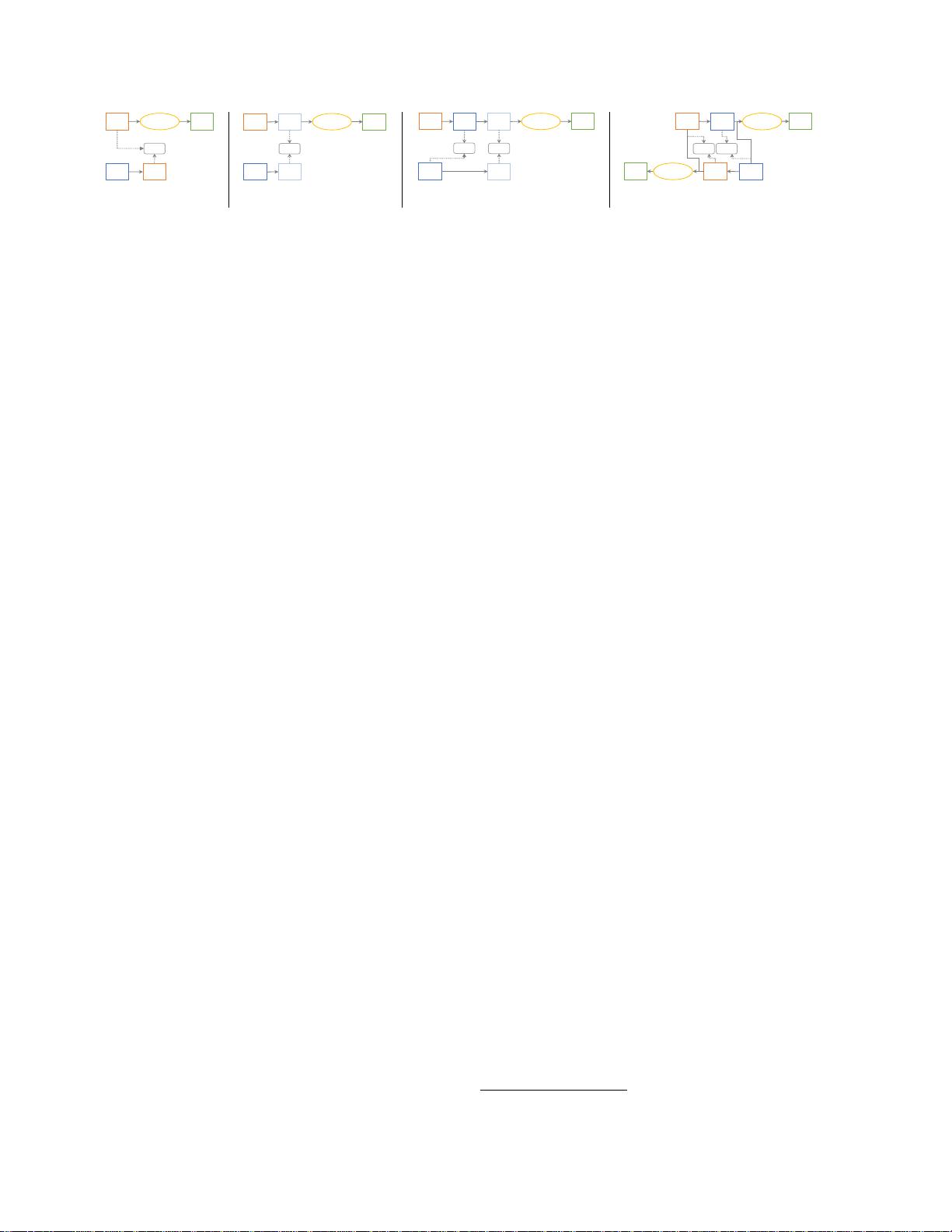
图2:使用域自适应进行单目深度估计的不同框架。从左到右:[26]中提出的方法,[59]中提出的方法以及本文中的方法。S,T,F,S2T(T2
S)和D分别表示合成数据,真实数据,提取的特征,生成的数据和估计的深度。AL和MDE分别表示对抗性损失和单目深度估计。与现有方法
相比,我们的方法利用了真实的立体数据,并在翻译过程中考虑了合成到真实以及真实到合成。
0
etal.
[59]开发了一个端到端的自适应网络,即T2Net,其中翻译
网络和深度估计网络被共同优化,以便它们可以相互改进。
然而,这些工作忽视了目标域自然图像的几何结构,而这对
于深度估计[16,
14]非常重要。受到这一观察的启发,我们提出了一种新颖
的几何感知的对称域自适应网络,即GASDA,通过利用立
体图像的极线几何关系。GASDA与先前的深度自适应方法[
26,59]之间的差异如图2所示。
0
3.方法
0
3.1.方法概述
0
给定一组N个合成图像-深度对{(xis,yis)}Ni=
1(即源域X
s),我们的目标是学习一个能够准确预测目标域X
t(即目标域)中自然图像深度的单目深度估计模型。由于
域偏移,很难保证模型能够很好地推广到真实数据[2,
59]。因此,我们通过利用立体图像之间的极线几何关系并
开发一种几何感知的对称域自适应网络(GASDA)来提供
一种解决方案。我们的GASDA包括两个主要部分,包括风
格转换网络和单目深度估计网络,与现有的工作不同[2,59,
26],我们同时考虑合成到真实[59]和真实到合成的转换[2,
26]。因此,我们可以分别在原始合成数据(X
s)和生成的逼真数据(Gs2t(Xs))上使用生成器Gs2
t以监督的方式训练两个深度估计器Fs和F
t。这两个模型是互补的,因为Fs具有干净的训练集X
s,但由生成器Gt2s生成的测试集Gt2s(X
t)存在噪声,如失真和模糊,由于不满意的转换,F
t则相反。然而,由于深度信息与特定场景几何相关,而源
域和目标域之间的特定场景几何可能不同,因此在Xs或Gs
2t(Xs)上训练的模型可能在Gt2s(Xt)或X
t上表现不佳。为了提供解决方案,我们利用了
0
在训练过程中利用真实立体对的极线几何结构{(xitl,xi
tr)}Mi=1(xitl和xit
r分别表示左图像和右图像2)来鼓励Ft和F
s捕捉目标/真实数据的相关几何结构。此外,我们引入了额
外的深度一致性损失,以确保Ft和F
s的预测在局部区域内一致。GASDA的整体框架如图3所示
。为简单起见,我们在大多数情况下省略上标i。
0
双向风格转换损失我们的目标是学习双向翻译器Gs2t和G
t2s来弥合源域(合成)Xs和目标域(真实)X
t之间的差距。具体而言,以Gs2t为例,我们希望Gs2
t(xs)与X
t中的真实图像无法区分。因此,我们使用一个鉴别器D
t,并通过进行最小最大博弈来以对抗方式训练Gs2t和D
t,遵循[20]。对抗性损失表示为:
0
不幸的是,普通的GAN会遭受模式崩溃。为了提供补救措施
并确保输入图像和输出图像以有意义的方式配对,我们使用
循环一致性损失[61]。具体来说,当按顺序将图像xs
输入到Gs2t和Gt2s中时,输出应该是xs
的重建,对于xt也是如此,即Gt2s(Gs2t(xs))≈
xs和Gs2t(Gt2s(xt))≈xt
。循环一致性损失的形式如下:
0
+ExtXt[||Gs2t(Gt2s(xt))−xt||1].(2)
除了对抗损失和循环一致性损失,我们还使用身份映射损失[
48]来鼓励生成器保留几何内容。
0
2在大多数情况下,我们将省略左图像的下标l。
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
120 浏览量
106 浏览量
299 浏览量
120 浏览量
114 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入解析JavaWeb中Servlet、Jsp与JDBC技术
- 粒子滤波在视频目标跟踪中的应用与MATLAB实现
- ISTQB ISEB基础级认证考试BH0-010题库解析
- 深入探讨HTML技术在hundeakademie中的应用
- Delphi实现EXE/DLL文件PE头修改技术
- 光线追踪:探索反射与折射模型的奥秘
- 构建http接口以返回json格式,使用SpringMVC+MyBatis+Oracle
- 文件驱动程序示例:实现缓存区读写操作
- JavaScript顶盒技术开发与应用
- 掌握PLSQL: 从语法到数据库对象的全面解析
- MP4v2在iOS平台上的应用与编译指南
- 探索Chrome与Google Cardboard的WebGL基础VR实验
- Windows平台下的IOMeter性能测试工具使用指南
- 激光切割板材表面质量研究综述
- 西门子200编程电缆PPI驱动程序下载及使用指南
- Pablo的编程笔记与机器学习项目探索
