"化学反应-粒子群混合优化用于自动发电控制的研究"
PDF格式 | 1.34MB |
更新于2025-01-16
| 184 浏览量 | 举报
可在www.sciencedirect.com上在线
ScienceDirect
电气系统与信息技术学报5(2018)229
用于自动发电控制的化学反应-粒子群混合优化
Banaja Mohanty
,
P.K.Hota
部
Veer Surendra Sai University of Technology
(
VSSUT
),
Burla 768018
,
Odisha
,
India
接收日期:2015年10月9日;接收日期:2017年2月6日;接受日期:2017年4月4日
在线发售2017年11月10日
摘要
本文提出了一种新的混合化学反应优化和粒子群优化(
HCROPSO
)优化
PI
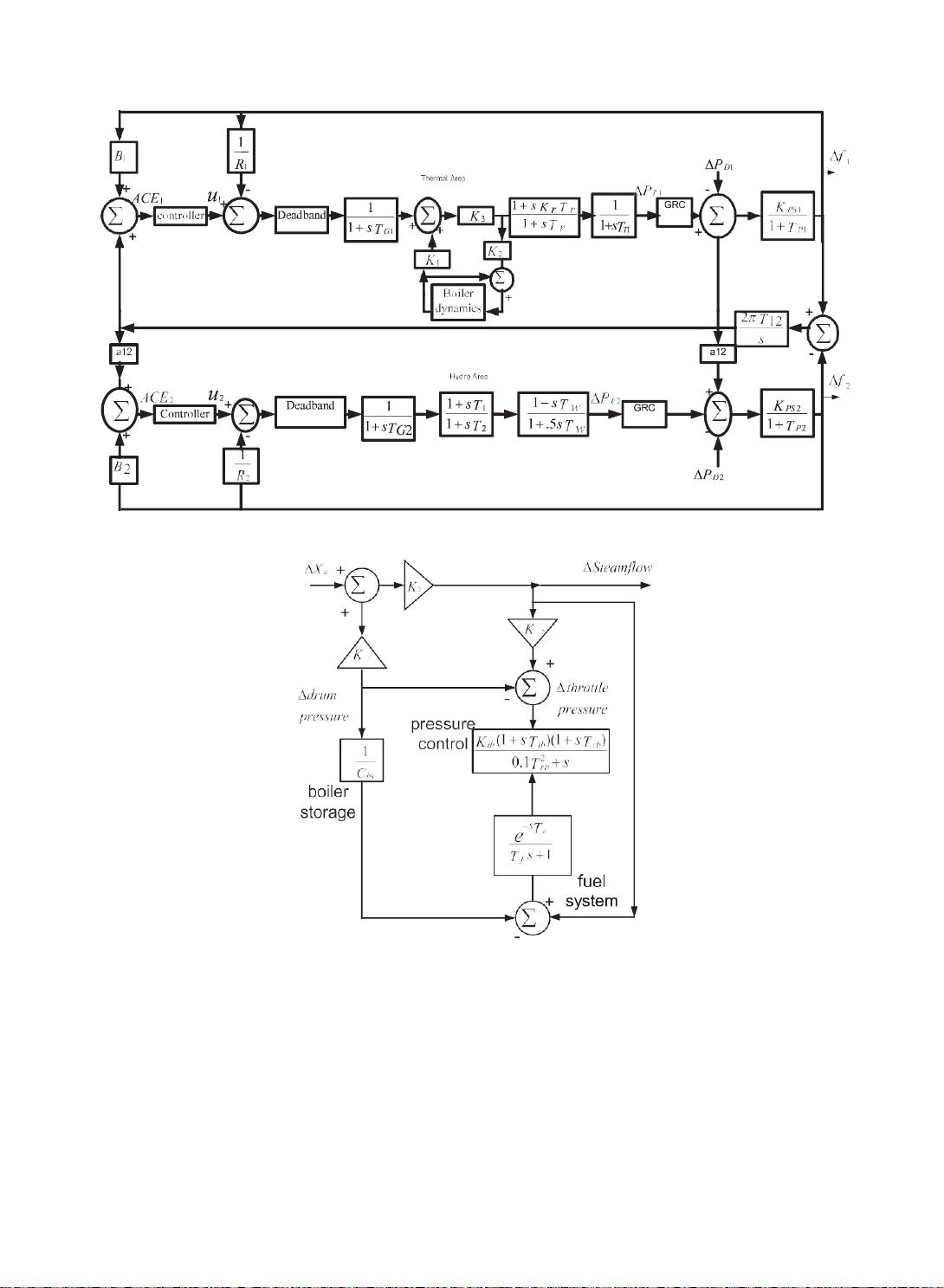
考虑了具有调速器死区、发电量约束和锅
炉动态特性等非线性的两区域再热系统。的参数
PI
控制器的优化采用
HCRO-PSO
技术。通过与粒子群算法、模糊控
制算法和模糊逻辑控制算法的比较,验证了该方法的优越性。在系统性能的改善,得到减少的建立时间,超调和下冲
的频率偏差和联络线功率偏差与建议的控制器。研究是在利率和惯性权重参数变化的情况下进行的。灵敏度分析是通
过改变系统参数和发电速率约束,从他们的标称值。分析表明,HCRO-PSO优化PI增益在标称获得的是相当强大的,不
需要重置系统参数的广泛变化。
© 2017由Elsevier B.V.代表电 子研究所(ERI)制作和主办。这是一个在CC BY-NC-ND许可证 下的开放获取文章
(http://creativecommons.org/licenses/by-nc-nd/4.0/)。
关键词:
化学反应优化(CRO);粒子群优化(PSO);调速器死区(GDB);发电率约束(GRC)
1.
介绍
负荷频率控制一直是电力系统设计、运行和控制中的主要问题之一。随着现代互联电力系统规模的不断
扩大、结构的不断变化和复杂性的不断提高,电力系统的安全性问题变得越来越重要在现代电力系统中,
提供可靠和良好的电力质量是一项具有挑战性的在这方面,LFC起着重要的作用,因为LFC的主要目标是
将系统频率和联络线功率振荡保持在规定的限制内。因此,一个健康的电力系统应该
*
通讯作者。
电子邮件地址:
banaja m@yahoo.com(B. Mohanty),p hota@rediffmail.com(P.K.
HOTA)。电子研究所(ERI)负责同行评审。
https://doi.org/10.1016/j.jesit.2017.04.001
2314-7172/© 2017由Elsevier B. V.制作和托管电子研究所(ERI)这是一个在CC BY-NC-ND许可证下的开放获取文章
(http://creativecommons.org/licenses/by-nc-nd/4.0/)。

剩余15页未读,继续阅读
查看更多
相关推荐





cpongm
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 3DEC软件煤层开挖命令流:任意形状开挖解决方案
- Python数据科学必备numpy-1.16.2版本发布
- Fernando's Corner开源项目:软件、硬件与操作系统
- Envoy-Products:环保产品社区的MVC架构与技术实现
- XX贸易公司服务专员职务详解及职责要求
- 室外停车场3D模型设计参考:车棚模型解析
- Service Worker实用指南精要
- Hibernate后自动退出程序的开源解决方案
- 首都经济贸易大学合并会计报表:高效整合分析
- 实现HTML右键弹出菜单功能的源码指南
- numpy-1.16.0版本发布:Python数据科学新选择
- GCC编译DOS可执行文件脚本的探索与实践
- 白色装饰花瓶3D模型设计解析
- 实现PD控制以驱动二维四旋翼飞机运动
- 实现命令外壳rshell:C++编程项目详解
- Python实现的Noise2Noise:Keras深度学习噪点图像处理











