无监督数据流语义场景标记:超越视频分割的高效算法
PDF格式 | 1.14MB |
更新于2025-01-16
| 201 浏览量 | 举报
本文主要探讨了一种创新的无监督语义场景标记方法,旨在处理实时流数据中的视觉感知任务。这种方法并非局限于传统的无监督视频分割,它不追求早期的连贯过分割,而是直接学习更高级别的语义概念。其核心在于利用集成学习策略,通过在数据流中对局部窗口内的数据进行聚类,构建出图形结构来表示跨窗口的标签映射,并通过协调标签来减少无监督学习过程中的噪声。
算法的关键点在于迭代地从数据相似性中学习,通过观察数据流中的模式和特征,自动捕捉和理解语义。与依赖于大量标注数据的传统监督学习方法不同,无监督语义场景标记允许在无需人工干预的情况下,实时更新和适应新的视觉概念,这对于那些需要频繁更新和快速反应的应用场景尤为适用,如自动驾驶、无人机监控等。
与其他方法,如基于层次图(GBH)的分割算法相比,USSL展示了更强的全局语义一致性,能够更准确地标记复杂场景中的对象,如交通锥。尽管在欠分割熵和过分割之间寻找平衡是挑战,但USSL在保持标记输出数量相近的前提下,显示出更高的准确性和灵活性。
文章指出,尽管半监督和自监督学习技术在一定程度上缓解了数据标记的负担,但USSL提供了更高效且无须大量人工干预的解决方案。这项研究对于推进无监督视觉感知技术的发展,尤其是在线学习和适应新概念的能力,具有重要意义,有望在未来视觉智能应用中发挥重要作用。
4614
M
I j
-
f
)
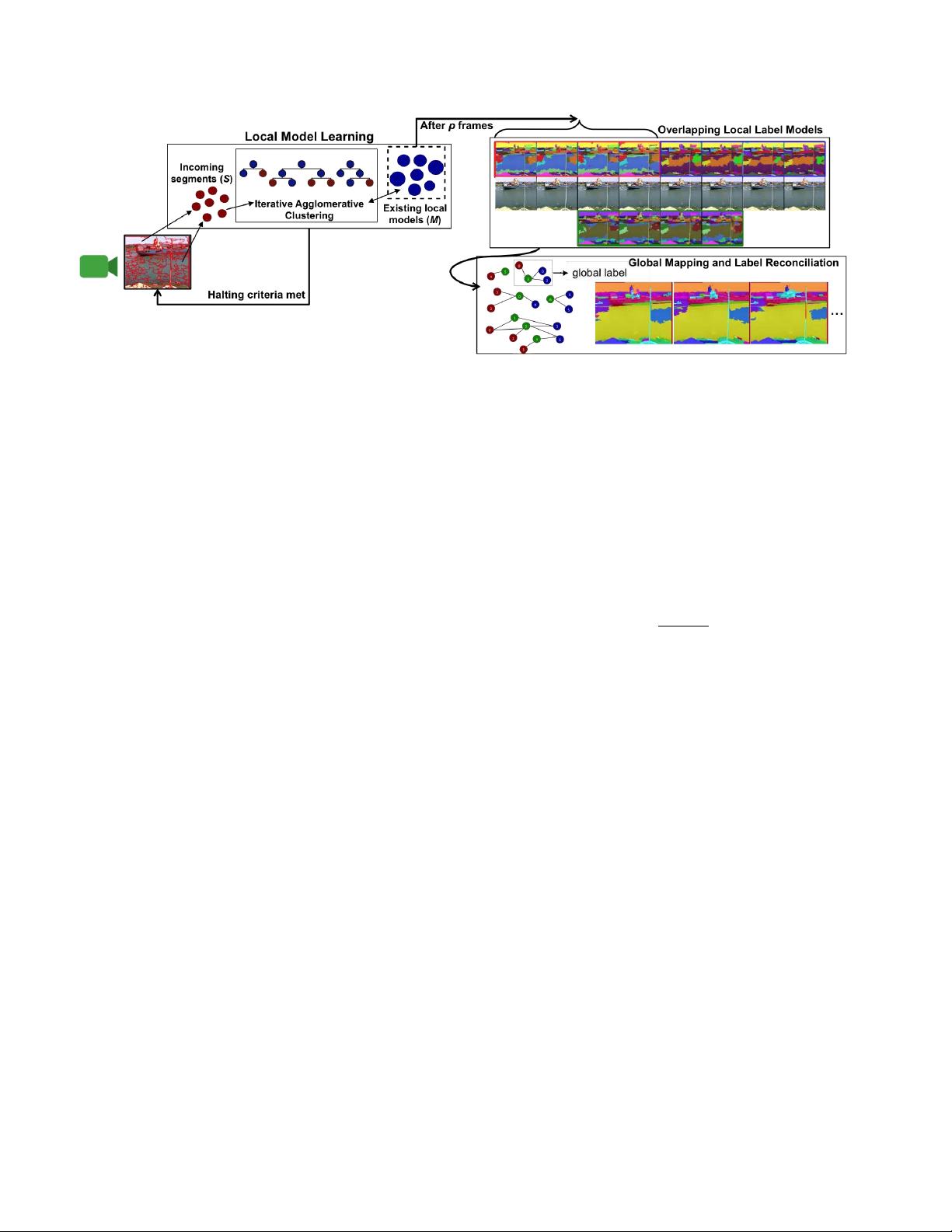
图
2.
无监督语义场景标注算法概述。来自数据流的下一个图像被过度分割,并且片段与来自流中的先前帧的现有模型聚集地合
并。为流中的窗口创建重叠的局部模型,并且使用图形编码来映射和协调这些局部标签集以生成全局标签集。
3.1.
图像表示
来自数据流的帧依次进入
USSL
系统
进行处理。
USSL执行场景分割,从传入帧的超像素开始,而
不是
单个像素,因为超像素提供更多的区域来提取对语
义建模重要的特征。我们使用基于图(
GB
)的图像分
割
[8]
来生成
USSL
聚类的初始过分割超像素。分割以参数
σ
=
0
运行
。
5
,
K
=
25
,
min
=
100
。传入帧
表示为
S
={
s
,
s
,
. . .
{\fn方正粗倩简体
\fs12\b1\bord1\shad1\3cH2F2F2F
}
(从W中的先前帧中学习)。现有的局部模型在图中
显示为蓝色圆圈,其不同大小表示局部模型代表W的
不同体积。
USSL
的本地学习技术的许多新颖性和贡献
具体而
言,USSL评估
两个模型
m
i
和
m
j
之间的相似性
,相对于第
3.1
节中描述的每个
直方图特征类型。 我们将模型
m
的
特征类型
r
表示
为
fr
。形式上,关于特征
r
的相似
性是
1 2
大多数图像分割技术依赖于颜色和
位置特征以识别像素的相干分组
ρ
(
m
,
m
,
r
)
=
. 1
.一
、
0
,
(
1
)
USSL使用额外的功能来帮助编码语义信息,就像许多
监督方法一样[23,28]。
1 .
一
、
0
以
上
r r
2
m
i
m
j
每个
si
由
LAB
颜色空间直方图表示,该颜色空间直方
图包括每个通道
23
个
bin
,
SIFT
描述符的
150
项码本
[20]
,以及使用半径为
1
,
2
和
4
的邻域的
8
个周围邻
居创建的局部二进制模式(
LBP
)
[24]
直方图三个实
验室频道,三个
LBP半径和SIFT直方图被独立地L1这些帧片段然后被
传递到当前实例化的本地窗口进行处理。
其产生在[0. 0
,
1
。
0]。特征类型
都是单独评估的,
所有外观特征类型之间的高相似性最有可能表示相同
的语义概念。因此,限制合并到这些模型将减少无监
督学习引入的噪声。然而,并非所有特征都与所有语
义类相关,因此USSL还评估了特征相似性的整体线性
组合:
Σ
3.2.
局部模型学习
USSL通过凝聚聚类学习语义模型,
φ
(
m
i
,
m
j
)=
r∈R
ρ
(
m
i
,
m
j
,
r
)
.
(
二)
将本地窗口中的数据存入流中。 我们将聚类算法针
对局部窗口输出的组的集合称为局部标签模型,
M
=
{
m
1
,
m
2
,
. . .
{\fn
方 正 粗 倩 简 体
\fs12\b1\bord1\shad1\3cH2F2F2F}
每个局部窗口
W
由
p
个连续帧组成,并且
M
被构造并迭代地适应每个输
入。
即将到来的画面。图2中的LocalModelLearning框说明
了这种迭代聚类流程。来自新帧的S中的片段(如红色
圆圈所示)进入系统,并与M
(
f
剩余11页未读,继续阅读
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Verilog实现的Xilinx序列检测器设计教程
- 九度智能SEO优化软件新版发布,提升搜索引擎排名
- EssentialPIM Pro v11.0 便携修改版:全面个人信息管理与同步
- C#源代码的恶作剧外表答题器程序教程
- Weblogic集群配置与优化及常见问题解决方案
- Harvard Dataverse数据的Python Flask API教程
- DNS域名批量解析工具v1.31:功能提升与日志更新
- JavaScript前台表单验证技巧与实例解析
- FLAC二次开发实用论文资料汇总
- JavaScript项目开发实践:Front-Projeto-Final-PS-2019.2解析
- 76云保姆:迅雷云点播免费自动升级体验
- Android SQLite数据库增删改查操作详解
- HTML/CSS/JS基础模板:经典篮球学习项目
- 粒子群算法优化GARVER-6直流配网规划
- Windows版jemalloc内存分配器发布
- 实用强大QQ机器人,你值得拥有
