基于事件的RGB结构光传感器:实时深度与色彩检测
131 浏览量
更新于2025-01-16
收藏 1.84MB PDF 举报
基于事件的结构光RGB传感是一种前沿的生物启发式传感器技术,它模仿人眼对光线变化的感知能力,尤其是用于实时和高动态范围的视觉应用。这种传感器的工作原理是异步地报告像素亮度的增减,当亮度变化超过预设阈值时,会生成包含事件坐标、时间和极性的数据。相较于传统的基于帧的摄像头,事件相机具有显著的优势,如高时间分辨率(微秒级响应)、低功耗和计算效率。
最初的事件相机主要是单色的,但随着技术的发展,彩色版本的出现使得它们在许多视觉任务中更为关键,如色彩识别、物体跟踪和深度感知。彩色事件相机能够在保持高动态范围的同时,提供丰富的颜色信息,这对于某些特定应用场景,如视频处理、模式识别和立体视觉至关重要。
本文介绍了一种创新方法,利用单色事件相机配合结构光投影仪实现全RGB事件的检测。结构光投影仪发射快速变化的RGB光束,其反射被事件相机捕捉。这种方法融合了事件相机的高反应速度和基于投影技术的优势,即使在复杂的光照环境下,也能实现实时、准确的深度和颜色信息获取。通过使用商用TILightCrafter4500投影仪和单色EC,研究人员成功地扩展了传感器的功能,使其能处理静态或移动物体,且不会受到静电或慢速移动物体的影响。
这项工作展示了事件相机在计算机视觉领域的广泛应用,包括但不限于运动检测、光流分析、姿态跟踪、SLAM、模式识别、深度估计以及高级图像处理任务。通过公开的GitHub代码库,研究人员希望促进这一领域的发展和创新,推动基于事件的RGB传感技术在更多实际场景中的应用。
5458
基于事件的结构光RGB传感
Seyed Ehsan Marjani Bajestani Giovanni Beltrame
Polytechnique蒙特利尔
{ehsan.marjani,giovanni.beltrame} @ polymtl.ca
摘要
基于事件的相机(
EC
)是异步报告像素亮度变化的
生物启发传感器由于其高动态范围、像素带宽、时间
分辨率、低功耗和计算简单性,它们有利于基于视觉
的项目在变化的照明条件下,它们可以检测到快速移
动与微秒级响应时间。第一代
EC
是单色的,但彩色数
据非常有用,有时对于某些基于视觉的应用程序至关
重要。最新的技术使制造商能够构建彩色
EC
,权衡传
感器的尺寸,并与单色模型相比大幅降低分辨率此
外,
EC
仅检测光的变化,而不显示静电 或缓慢移动
的物体。我们介绍了一种方法来检测全
RGB
事件使用
单色
EC
辅助, 结构光投影仪。投影仪在场景上发
射快速变化的
RGB
光束图案,其反射被
EC
捕获。我们
结合了
EC
和基于投影的技术的优势,并允许使用商用
TI LightCrafter 4500
投影仪和单眼单色
EC
对静态或移
动对象进行深度和颜色检测我们的代码是公开的:
github.com/MISTLab/event based rgbd ros
1.
介绍
基于事件的相机(EC)异步地报告像素亮度变化,
这是受人眼启发的行为[10]。当亮度改变超过像素的
某个阈值时,相机生成包含像素的坐标(x,y)、时
间戳和事件的极性(即,增加或减少)。虽然EC不能
捕获完整图像,但它们可以比标准的基于帧的传感器
快数千倍地检测运动,并且由于它们没有外部快门周
期,它们的输出是事件驱动的和无帧的,从而导致非
常低的延迟、功率和带宽需求。
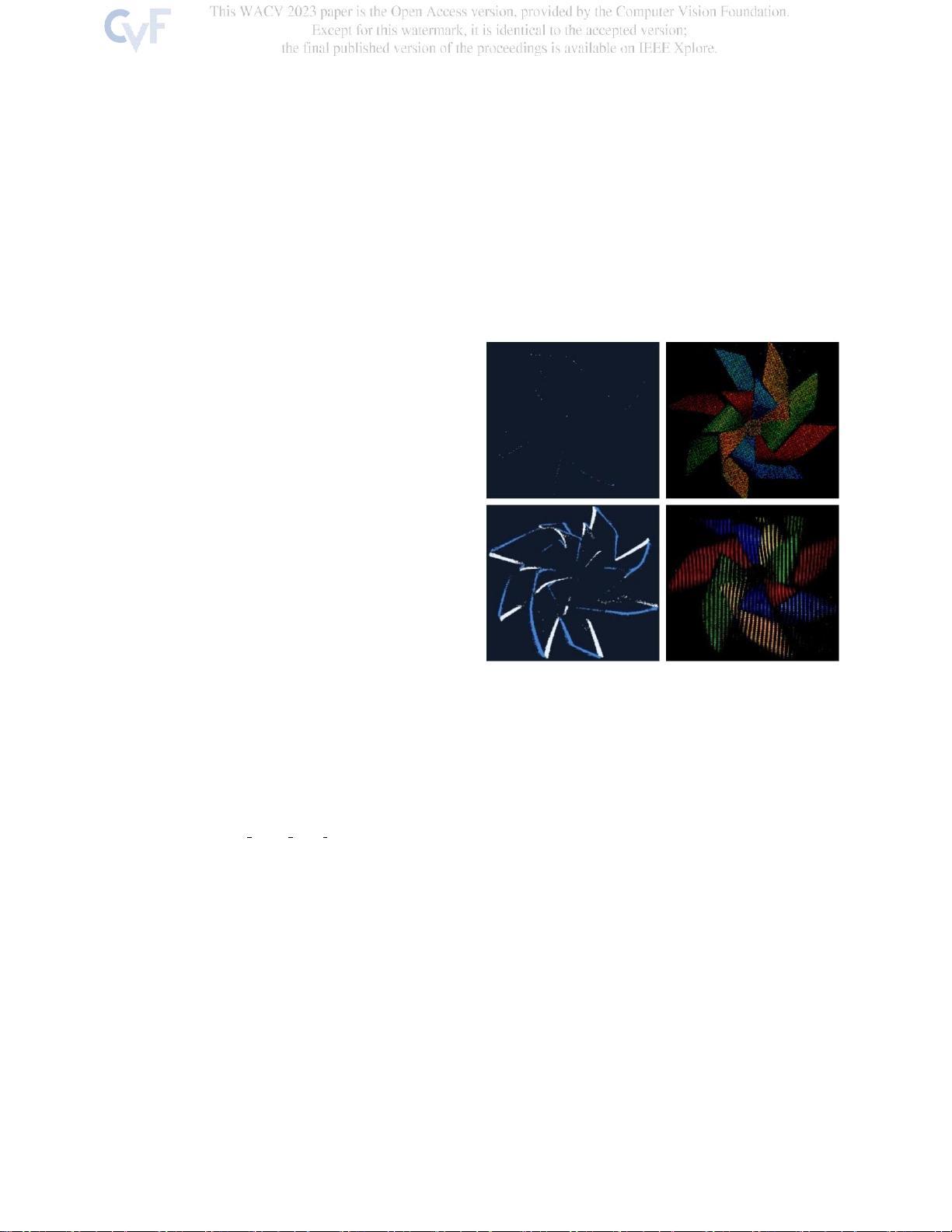
图1.颜色检测有稳定的(顶排)和旋转的(底排)彩色纸风
车.左栏:没有结构光的单色事件。右栏:彩色图像重建辅助
结构光与两种模式和等效的 速度为30 fps(上)和150 fps
(下)。
EC已被用于各种计算机视觉应用中,例如快速运动
检测和跟踪[2,22,1]、光流、姿态跟踪和视觉惯性
导航[52,26]、同时定位和映射(SLAM)[37,40]、
模式识别[44]、深度估计[45]、图像处理[46]、图像处
理[47]、图像处理[48]和图像处理[49]。
和立体视觉[51,36,45],以及更多。
在计算机视觉中,颜色信息具有重要的作用[47],
并 且 可 能 对 许 多 任 务 ( 如 分 割 和 识 别 ) 至 关 重 要
[19]。第一代EC是单色的,彩色EC最近才开始可用
[18,46,24,23]。然而,由于传感器尺寸方面的限
制,彩色EC具有比单色EC更低的分辨率,因为它们需
要使用滤色器。
值得注意的是,EC报告像素亮度变化,这意味着当
相机(和/或其视野中的对象)静止或缓慢移动时,EC
不会报告任何内容(图10)。1,左上角),这可能是
关键的
下载后可阅读完整内容,剩余9页未读,立即下载
928 浏览量
164 浏览量
155 浏览量
2025-02-08 上传
2024-12-26 上传
2025-02-25 上传
2025-02-26 上传
2025-02-20 上传
2025-01-05 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
