ARAPReg:参数化形状生成器的无监督学习方法
PDF格式 | 2.57MB |
更新于2025-01-16
| 128 浏览量 | 举报
ARAPReg是一种创新的无监督学习方法,旨在从可变形形状的集合中训练形状生成器,特别关注于保持形状的局部刚性。这种方法由UT奥斯汀的研究团队提出,包括黄启星、张在伟、Xiangru Huang、江俊峰、Bo Sun、Chandrajit Bajaj等专家。传统上,形状生成器往往面临如何捕捉并保持形状变化中的关键结构难题,比如人脸的特征或动物的脚趾位置。
ARAPReg的核心在于其独特的无监督损失函数,该损失基于ARAP(Approximate Rigidity and AreaPreserving)能量的Hessian谱分解。ARAP能量模型强调形状之间的局部刚性保持,确保生成的新形状在相邻部分之间的变形尽可能接近刚体运动。这种损失设计巧妙地分离了形状变化与姿势变化,提供了更清晰的表示,并允许通过标准模型如变分自编码器(VAE)和自动解码器(AD)进行有效训练。
与现有形状生成方法相比,ARAPReg的优势在于其对各种形状类别的适应性,如人类、动物和骨骼,尤其是在处理大规模几何变化时表现出色。这种方法不仅能够复现复杂的形状变换,而且能够保持生成形状的自然约束,这对于视觉计算任务如神经形态发生恢复、数据驱动的形状重建以及基于图像的重建等领域具有重要意义。
通过实验验证,ARAPReg在公共基准数据集上的性能显著优于同类技术,证明了其在形状生成领域的有效性。研究者提供的代码和数据可在GitHub上获取,以便研究人员进一步探索和应用这一创新的无监督学习策略。
5817
L
z
✓
✓
s
k
@z
@z
g
(
z-6z
)
k
2 R 2 R
+
λ
R
·
r
R
(
g
(
z
)
,
(
z
)
)
@z
R
✓
2
R
✓
✓
自动解码器
(AD)
具体来说,我们将无监督损失定义为
r
eg
(
✓
)
:
=
E
N
k
6
z
E
N
kg
(
z
+
6
z
)
-2g
(
z
)
+
✓
2
✓
@
g
✓
其中,第一项促进生成器
g
的平滑度;s是ARAPReg的超
参数。请注意,与强制执行
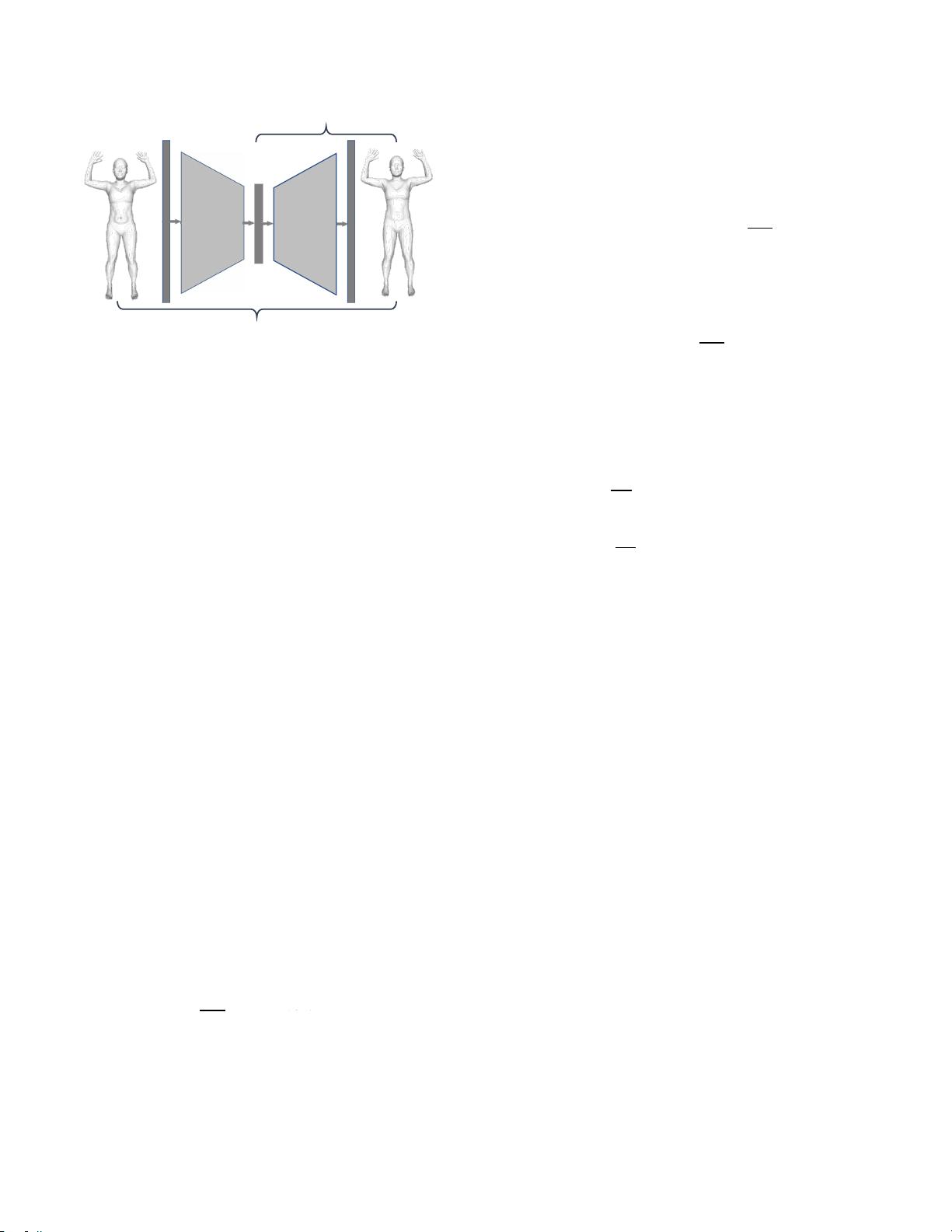
VAE
图
2
:我们考虑多个标准形状生成
器,包括变分自动
编码器(VAE)和自动
解码器(
AD
)。 图形编码器
h
$
将输入网格
g
映射到潜在参数
h
$
(
z
)。图解码器
映射
潜在参数
z
到外部网格
g
✓
(
z
)。
在底层形状空间中的相邻生成的形状之间提供如图1的
左侧部分所示,该损失的目标是显著改善网格生成器
的生成行为,例如,保留多尺度几何细节。
在第5节中,我们将讨论如何将这种无监督损失插
入到基于VAE和AD的标准形状生成模型中。
4.
ARAPReg
损失
制定局部刚性的保持是相当具有挑战性的,因为所
得到的损失项必须足够简单以便于网络训练。一种直
接 的 方 法 是 在 生 成 的 形 状
g
✓
(
z
) 与 其 扰 动
g
✓
(
z
+
d
z
)之间强制执行局部刚性约束。
在这里,d
z
表征了
参数空间然而,该方法需要对大量形状对进行采样。
此外,g
✓
(z)和g
✓
(z
+
dz)之间的形状变形的典型
公式需要求解计算开销大的优化问题(参见图10)。
[6])。
ARAPReg缝合了几个新颖的想法,以导出一个简单
的无监督损失,该损失不会与生成建模中使用的典型
损失产生不利影响(参见第5.1节)。
4.1.
步骤
I
:解耦平滑和雅可比正则化
首先,ARAPReg将局部刚性的执行解耦为两个术
语。第一项加强了生成器的平滑性。该平滑性惩罚使
得能够实现第二项,其将局部刚性的保持公式化为发
电机的雅可比矩阵上的势,即,
@
g
✓
@
g
✓
g
(
z
+
6
z
)
g
(
z
)
+
@
z
(
z
)
·
6
z
,
(
2
)
(1)中的公式不涉及
g
的一阶导数。因此,网络训练
更有效,因为它只需要计算的一阶导数
G.另一方面,它惩罚g
✓
的二阶导数。因此,它隐含地
执行(2)。第二
(
1
)中的第二项
r
R
(
g
✓
(
z
)
,
@
g
(
z
))
(将
很
快
定义
)用公式表示关于生成的网格g
✓
(z)和由雅
可比
矩阵
@
g
✓
(z)指定的无穷小扰动的正则化损失(参
见图3)。λ是ARAPReg的另一个超参数。
换句话说,代替强制执行形状对之间的局部刚性切
空间是形状空间的一阶近似。平滑势确保该一阶近似
是准确的,即,刚性约束传播到形状空间的局部邻
域。正如我们稍后将讨论的,该公式的另一个吸引人
的特性是雅可比矩阵使我们能够轻松地对姿势和形状
变化进行建模(其中姿势变化比形状变化更刚性)。
这个目标是很难实现使用通用的成对正则化。
虽然平滑度约束涉及形状对,但我们的实验表明,
没有必要对大量的形状对进行采样。一种解释是,深
度神经网络训练具有隐式规则化(c.f. [33]),它促进
平滑。
4.2.
步骤
II
:雅可比正则化
我们继续引入的本地刚性项
r
R
,正则化的雅可比
矩阵的发电机。为了使符号
整齐,我们专注于制定
r
R
(
g
, J
)
。这里
g3n
表示顶点
x
位置顶点
r
,并且
J3n
=
k
是指定无穷小扰动的雅可比矩阵
关于G。
我们的公式受到尽可能刚性(或ARAP)势函数的
启发[43,49,55]。该标准模型测量一对形状之间的
变形。考虑一个顶点位置
为
g2r3n的
顶点位置为
g
+
x2R3n
的网格。表示
(
z
)
(3n)k
.
@z
O
i
2
SO
(
3
)
作为与第
i
个相关联的潜旋转
图
图
编码
解码
G
!
#
“
z
、
(
1
)
剩余13页未读,继续阅读
相关推荐


2 浏览量

3 浏览量
2 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
