"实时并行点检测与匹配:一种用于人机交互检测的新方法"
91 浏览量
更新于2025-01-16
收藏 1.91MB PDF 举报
482
PPDM:用于实时人机交互检测的并行点检测与匹配
廖跃
1
、
2
刘思
1
王
飞
2
陈
艳杰
2
陈倩
2
冯佳诗
31
北京航空航天大学
2
商汤科技
3
新加坡国立大学
摘要
22
我们提出了一种单阶段的人
-
物体交互(
HOI
)检测
方法,该方法在单个
Ti- tan XP GPU
上以
37fps
的速度在
HICO-DET
数据集上优于所有现有方法。这是第一种
实时
HOI
检测方法。传统的
HOI
检测方法由两个阶段组
成,即,人
-
对象提议生成和亲
-
对象分类。它们的有
效性和效率受到顺序和分离的体系结构的限制。在本
文中,我们提出了一个并行点检测和匹配(
PPDM
)
HOI
检测框架。在
PPDM
中,
HOI
被定义为点三元组人
类点、交互点、对象点
>
。
<
人、物点为检测框的中
心,交互点为人、物点的中点。
PPDM
包含两个并行
的分支,即点检测分支和点匹配分支。点检测分支预
测三个点。同时,点匹配分支预测从交互点到其对应
的人和物点的两个位移。将来自同一交互点的人点和
物点视为 匹 配 对 。 在 我 们的新的
par-bandwidth
架构
中,交互点隐式地为人类和对象检测提供上下文和正
则化。不太可能形成有意义的
HOI
三联体的孤立检测
盒被抑制,这增加了
HOI
检测的精度。此外,人和物
体检测框之间的匹配仅应用于有限数量的过滤后的候
选交互点,这节省了大量的计算成本。此外,我们还
建立了一个新的面向应用的数据库
HOI-A
,它是对现
有数据
集的
一个很好的补充。
1.
介绍
人机交互(HOI)检测[30,11,10,
[2016 - 09 - 16]最近,越来越受到关注
通讯作者(liusi@buaa.edu.cn)
1
https://github.com/YueLiao/PPDM
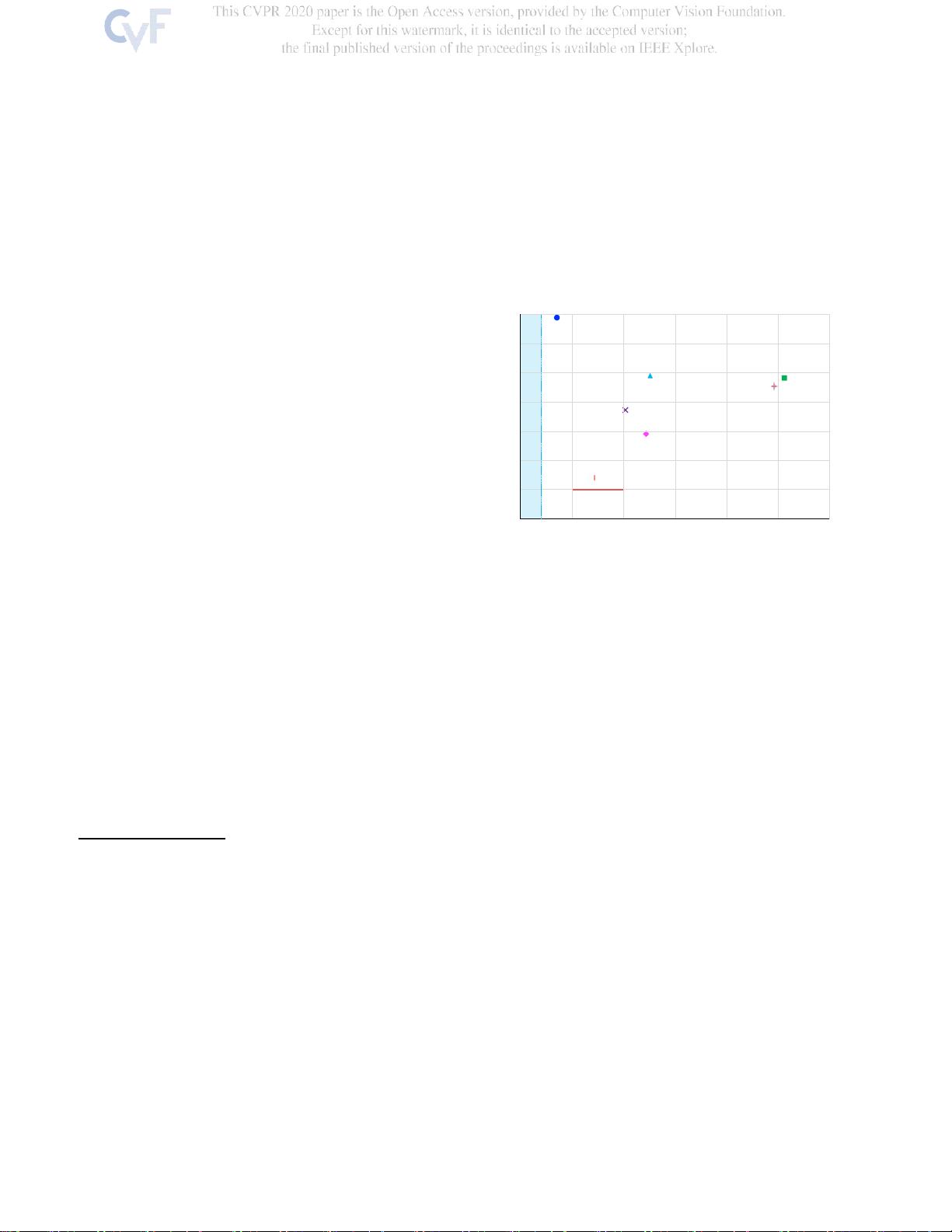
20
18
16
14
12
10
8
0.1 0.2 0.3 0.4 0.5 0.6
每图像
图1.HICO-Det测试集上的mAP与推断时间
我们的PPDM-DLA优于国家的最先进的方法,推理速度为37
fps
(
0
。
027s
)。这是第一种 实时
HOI
检测方法。我们 的
PPDM
沙漏达到
4
。与最先进的技术相比,速度更快,
mAP
提高了
27%
。
给定图像,HOI检测旨在检测三重态
<人、交互、对象>。与一般的视觉关系检测不同[19,
29,20,13,32],三元组的主体固定为人类,而交互
是动作。HOI检测是对以人为中心的场景进行高级语
义理解的重要一步。它在活动分析、人机交互、智能
监控等方面有着广泛的应用.
传统的HOI检测方法[2,22,12,16,26]主要包括
两个阶段。第一阶段是人-对象提议生成。预先训练的
检测器[8,23]用于定位人和物体。
然后,通过成对地组合过滤
的
M
个
人框和N个对象来
生成M×N
个
人对象提议
弹出框。第二阶段是建议分类,预测每个人-对象pro-
bandry的相互作用。两阶段法的有效性和效率的局限
性建议生成阶段完全基于对象检测置信度。每个人/物
的建议都是独立生成的。将两项提案结合起来形成一
个有意义的
平均值(
mAP
)
PPDM-
沙漏(我们的
)
PPDM
-DLA
(
O
urs
)
PMFNet
无虚饰
锡
IC
一个
实时
e
GPNN
InteractNet


剩余10页未读,继续阅读
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java图片爬虫程序深入解析:连接数据库实现高效下载
- Panasonic SDFormatter:专业SD卡格式化解决方案
- 官方发布:单片机下载器驱动程序安装与使用指南
- 深入理解Cloud Post - 构建Node.js应用与安全实践
- Android网络检测技术示例:检测不可用WiFi连接
- MSP430F149烧录软件使用与USB-BSL驱动下载指南
- 揭秘网站安全编程:防止xss漏洞的实战技巧
- Java推箱子游戏开发教程及实践
- 使用PHP将Markdown转换为HTML的简易教程
- J2ME推箱子游戏开发:课程设计与移动运行指南
- 邮政编码识别:利用OPENCV技术进行倾斜矫正与字符分隔
- 揭秘无刷电机霍尔传感器与绕组位置对应关系
- OMics患者报告生成与R软件包安装指南
- 使用xmlbeans-2.4.0快速生成JAVA代码的方法
- suit.less:简化 LESS 编写,兼容 Suitcss 样式
- C#连接Access创建密码管理器简易操作指南
