大视差图像拼接:基于变形残差的鲁棒算法
67 浏览量
更新于2025-01-16
收藏 1.49MB PDF 举报
图像拼接是计算机视觉领域的一个关键技术,其目的是融合来自不同视角的图像,形成具有更宽视野的图片。传统的方法通常包括特征检测、匹配、图像扭曲模型估计以及最终的像素合成。这些步骤旨在将两个图像对齐,消除因视差造成的场景不一致性。
然而,当场景并非完全平面,特别是存在深度差异和大视角差的情况下,传统的单应性模型(基于平面场景的假设)就显得力不从心。大视差图像拼接面临着更大的挑战,因为物体在不同视图中的相对位置会发生显著变化,导致视差伪影的出现,这是当前图像拼接方法的主要瓶颈。
本文提出了一种创新的基于变形残差的大视差图像拼接方法,作者Kyuyul Lee和Jae-Young Sim来自韩国蔚山的电气和计算机工程学院。他们的研究重点在于解决大视差场景下的图像拼接问题。首先,他们通过检测并匹配特征点来估计多个单应性,这一步骤旨在找出最佳的局部对应关系。接着,引入了新的“扭曲残差”概念,用于评估每个特征匹配相对于不同单应性的变形程度。
为减轻视差伪影的影响,算法采用了超像素分割技术,将输入图像分解为较小的、具有相似纹理的区域。然后,针对每个超像素,通过寻找并最小化扭曲残差加权的特征匹配误差,计算出最优的自适应单应性。这种方法允许对图像进行更精细的变形调整,以更好地适应场景的复杂性。
实验结果显示,这个新算法在处理大视差图像时展现出更好的性能,无论是主观质量还是客观评价指标,都优于现有的拼接方法。这对于增强全景图像的生成质量、360°全景相机和环绕视图系统的应用,以及图像编辑软件如Adobe Photoshop和Autostitch中的图像合成都有着重要的实际价值。
总结来说,本文的工作不仅提升了图像拼接的鲁棒性,还引入了更为精细的处理策略,对于处理非平面场景和大视差条件下的图像融合具有重要意义。这一研究成果有望推动计算机视觉领域的进一步发展。
8200
3
k=1
K
k=1
H
H
由平面
π
诱导的单应矩阵H。
(
1
)
其中,n表示按比例的相等由于Hx和y在
J
中的两
个位置相同,我们有
[22]
0
3
×
1
= y
×
Hx
0
1
×
3
−
x
T
y
2
x
T
(二)
=
x
T
0
1
×
3
−
y
1
x
T
h
−
y
2
x
T
y
1
x
T
0
1
×
3
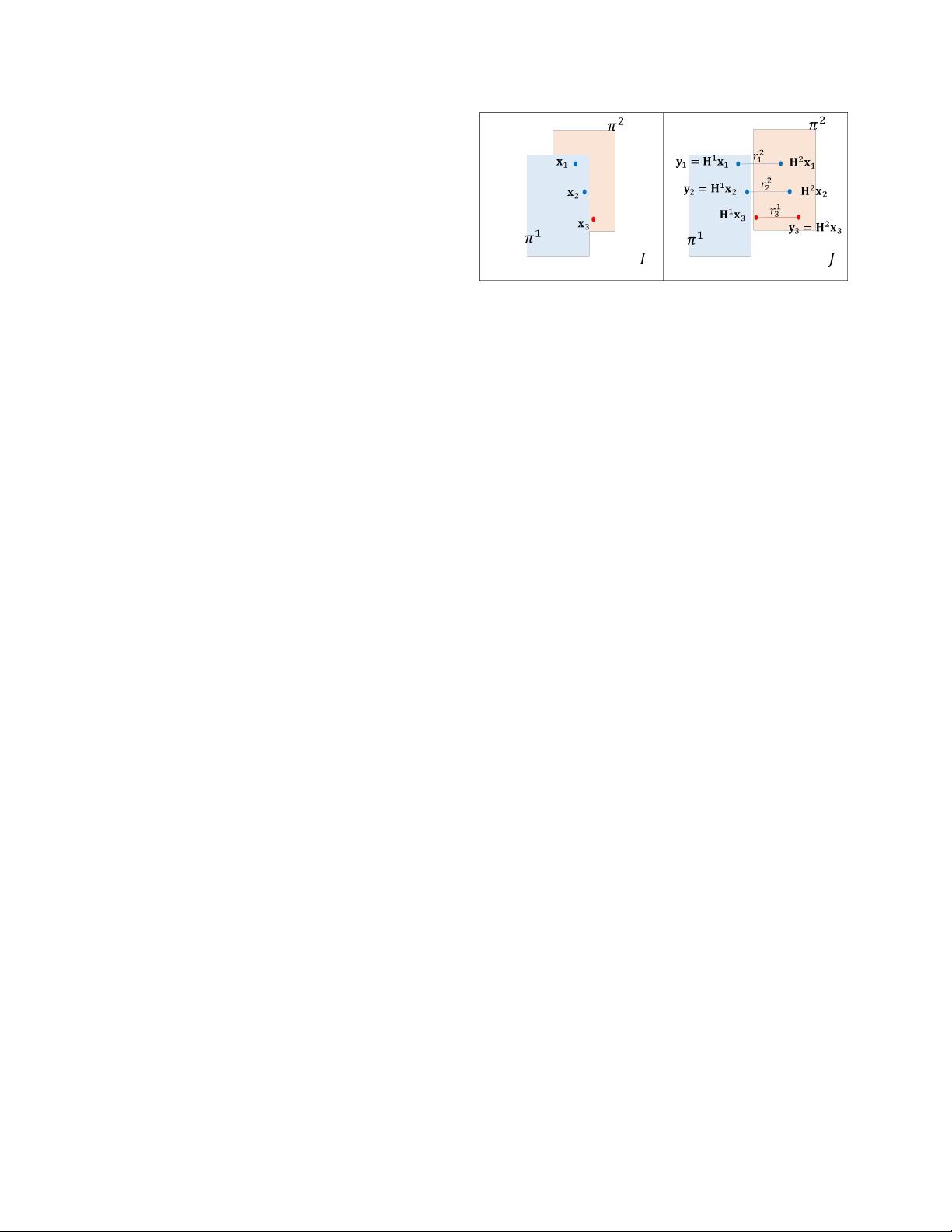
图1.与{x
k
Participy
k
}
k=1
的三个特征匹配相关的
其中
h
是通过对
H
的行进行向量化而获得的。当
x
和
y
不是从π上的同一景物点投影,且
I
和
J
之间的
摄像机基线不够
小时,方程(
2
)不成立,范数
φ
y×Hx φ可视为
I
和
J
的对准误差。
直接线性变换(DLT)[25]从
I
和
J
之间的
K
个匹配
像素对中
估计
最佳单形
hy
h
,从而使代数误差最小
化,
Σ
K
h
=
ar
gm
i
n
g
k
h
2
,
s.t.
1
,
(
3
)
k=1
2
=
argmin
,
s.t.
1
、
(
4
)
其中g
k
是(2)中RHS矩阵的前两行,
π
1
和π
2
的平面
。
3.2.
基于变形残差的变换
在(
7
)中定义的基于空间距离的权重
减轻了基于
全局单应性的图像扭曲方法的伪影,然而其仍然遭受
严重的未
对准伪影,特别是在具有大视差的挑战性
图像上
。 如图
1
所示,让我们考虑三个特征点,其
中两个点
x
1
和
x
2
分别
位于平面π
1
上,而点
x
3
位于
另一个平面
π
2
上。 我们假设两个平面
π
1
和
π
2
具有彼
此不同的场景深度,从而导致严重视差
,并且因此
π
1
和π
2
在
J
与
I
中的有很大不同
。
考虑这三个
第
k
个匹配像素对和
G∈
R
2K
×
9
获得
匹配对
{x
k
参与
k
}
3
我
和
J之间
。而
通过堆叠所有K个匹配对
的
gk
由G的最低有效右奇异
向量解
h
_
y
得到
最优
同态矩阵
H
_y
。
注意,该全局单应性可以产生显著的
当将图像与非平面3D场景和大相机基线对齐时,会出
现视差伪影为了减轻这种假象,Zaragozaet al.[22]将
DLT修改为移动DLT(MDLT),将图像划分为规则
的网格单元,并自适应地估计每个单元的单应性的
最优同
形
图
(等价于其矢量化形式
ˆ
在
I
中
x
∈
1
和
x
∈
2
之间的相对位置相同,
对于
J中
的匹配像素
y
=
1
和
y
=
2
,
I中 的
x
=
2
和
x
=
3
之间
的
位置关系与
J
中
的匹配像素
y
=
2
和
y
=
3
之间的位置
关系完全不同
,如
图
1
所示。(
7
)中的现有加权方案
分配较高的
对空间上更接近的特征点进行加权,而不管不同的场
景深度,因此在对象边界附近产生视差伪像。
为了克服这个缺点,我们首先提取
H
m
在
I
和
J
之间的
多个可能的单应矩阵
并为第k个匹配
的
h
i
)通过采用权重
ma-k
我的
朋
友
(4)
作为
关于第
m
个单应性
H
m
的点
x
k
为:
h
=
ar
gm
i
n
B.W.Ghosts
2
,
s.t.
1
、
(
5
)
r
m
=
y
k
−
y
m
。
(
八)
一
喜
一健
其中
W
i
∈
R
2
K
×
2
K
是
第i
个
单元格,由下式给出:
其中y
m
=
H
m
x
k
。 在图
1
中,我们考虑了与
π 1
和
π 2
相关的两个单应性
H
1
和
H
2
,
这三个点
{
x
k
}
3
使用两个单应性,
Wi
=
di
a g
(
[
wi
,
1
wi
,
1
wi
,
2
wi
,
2
···
wi
,
K
wi
,
K
]
)
.
(
六)
分别为。由于
x1
和
x2
都位于π
1
上,因此由
H1
引起的
r1
和
r1
的翘曲残差很小
,而由
H1
引起的
r2
和
r2
的翘曲残差
很
小
权重
w
i
,
k
使用空间距离
be-
1
2
2 1 2来
中间像素c
第i
个
像元和第k个要素
由H
变得很大。相反,
x
3
位于π
2
上,因此
i
导致
r2
的翘曲残差较小,但残差较大
点x
k
由
1
3
给出
w
i
,
k
=
m
ax
(
e
x
p
(
−
<
$
c
i
−
x
<$
k
<
$2
/σ
2
)
,
γ
)
.
(
七)
剩余10页未读,继续阅读
520 浏览量
198 浏览量
107 浏览量
186 浏览量
198 浏览量
828 浏览量
2021-09-19 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Saber仿真下的简化Buck环路分析与TDsa扫频
- Spring框架下使用FreeMarker发邮件实例解析
- Cocos2d捕鱼达人路线编辑器开发指南
- 深入解析CSS Flex布局与特性的应用
- 小学生加减法题库自动生成软件介绍
- JS颜色选择器示例:跨浏览器兼容性
- ios-fingerprinter:自动化匹配iOS配置文件与.p12证书
- 掌握移动Web前端高效开发技术要点
- 解决VS中OpenGL程序缺失GL/glut.h文件问题
- 快速掌握POI技术,轻松编辑Excel文件
- 实用ASCII码转换工具:轻松实现数制转换与查询
- Oracle ODBC补丁解决数据源配置问题
- C#集成连接器的开发与应用
- 电子书制作教程:你的文档整理助手
- OpenStack计费监控:使用collectd插件收集统计信息
- 深入理解SQL Server 2008 Reporting Services
