四维成本体积处理的高效精确光流估计
PDF格式 | 2.5MB |
更新于2025-01-16
| 84 浏览量 | 举报
"直接成本体积处理的精确光流方法是一种新的光流估计技术,它借鉴了立体匹配流水线的优势,能够在处理四维成本量时保持高精确度。该方法克服了以往由于成本量大小而导致的计算难题,通过利用数据的规律性实现了快速处理。在Sintel和KITTI2015基准测试中,这种方法展现出比现有光流算法更高的精度。论文还探讨了光流估计与立体匹配的相似性,并指出虽然领先的立体匹配方法采用全局和半全局优化技术,但光流的四维成本体积处理一直被视为难以实现。近期的研究证明了全成本体积处理的可行性,但计算复杂性限制了其应用。本文提出的算法成功地将立体匹配的成功结构应用于光流估计,同时避免了计算效率的大幅下降,实现了高精度与运行时间的良好平衡。"
本文的核心知识点包括:
1. **光流估计**:光流是指图像序列中像素在时间和空间上的运动轨迹,是计算机视觉中的重要概念,用于理解物体的运动和场景的动态。
2. **成本体积处理**:在立体匹配和光流中,成本体积是评估不同对应关系代价的一种数据结构。通过构建和优化成本体积,可以找到最佳的匹配像素对。
3. **精确度提升**:该方法通过直接处理全四维成本量,提高了光流估计的精度,解决了大位移、无纹理区域、运动模糊和非朗伯效应带来的挑战。
4. **立体匹配流水线**:立体匹配是光流的一种特殊情况,它的成功方法通常包括建立规则的离散搜索空间和应用全局优化,以提高匹配一致性。
5. **四维成本量**:光流的成本体积比立体匹配的三维成本体积更复杂,但该方法展示了如何有效地处理这一维度增加的问题。
6. **全局和半全局优化技术**:这些技术用于消除匹配中的异常值,增强一致性,例如半全局匹配(Semi-Global Matching, SGM)在立体匹配中的应用。
7. **计算效率优化**:通过识别和利用成本体积的规律性,算法能够快速适应四维设置,降低了计算需求。
8. **基准测试比较**:在Sintel和KITTI2015基准上,该方法的表现优于其他已发布的通用光流方法,同时保持了竞争力的运行时间。
9. **最近邻搜索与从粗到细策略**:传统光流方法常使用这些策略来降低计算复杂性,但可能牺牲部分精度。
10. **理论与实践结合**:论文不仅提出了新的算法设计,还分析了将立体匹配的理论成果转化为光流估计的实践挑战和解决方案。
通过这些知识点的综合运用,文章提供了一种创新的光流估计方法,旨在解决当前技术面临的精度和效率问题。
1
通过直接成本体积处理实现精确光流
Xia Xu Rene 'Ranftl Vladlen Koltun英特尔
实验室
摘要
我们提出了一种光流估计方法,
op-erates
上的全四
维成本量。这种直接的方法共享领先的立体匹配流水
线的结构优势,这是已知的,以产生高精度。直到今
天,由于成本量的大小,这种方法被认为是我们表
明,完整的四维成本量可以在几分之一秒,由于其规
律性。然后,我们利用这种规律性进一步适应半全球
匹配的四维设置。这产生了一个管道,
250
200
150
100
50
0
DeepDiscreteFlow
流场
+
SPM-BPv2
流场
CPM-
Flow
FullFlow
Ours
5.1 5.2 5.3 5.4 5.5 5.6 5.7 5.8 5.9
EPE-all
实现了比现有技术的光流方法显著更高的精度在
Sintel
和
KITTI 2015
基准测试中,我们的方法优于所有已发
布的通用光流方法。
1.
介绍
光流估计是计算机视觉系统的关键组成部分。尽管
取得了一致的进展,但由于大位移、无纹理区域、运
动模糊和非朗伯效应,精确的光流估计仍然是一个公
开的挑战。显然,领先光流算法的精度落后于立体匹
配相关问题的精度。尽管这两个问题在结构上非常相
似:立体匹配可以被看作是光流的特殊情况。
立体匹配和光流的最成功的方法往往遵循不同的哲
学。领先的立体方法将搜索空间视为高度规则的离散
结构,并明确构建该结构的完整表示,称为成本体积
[29,39]。这使得能够应用强大的全局和半全局优化
技术 ,去 除离 群值 并加 强一 致性 [16 , 33] 。与 此相
反,光流的成本体积是四维的,其显式的构造和处理
直到最近才被认为是不可能的。出于这个原因,光流
方法通常依赖于最近邻搜索[25,3,12,2]和从粗到
细的方法。
分析[28]。
最近的研究表明,在com上操作
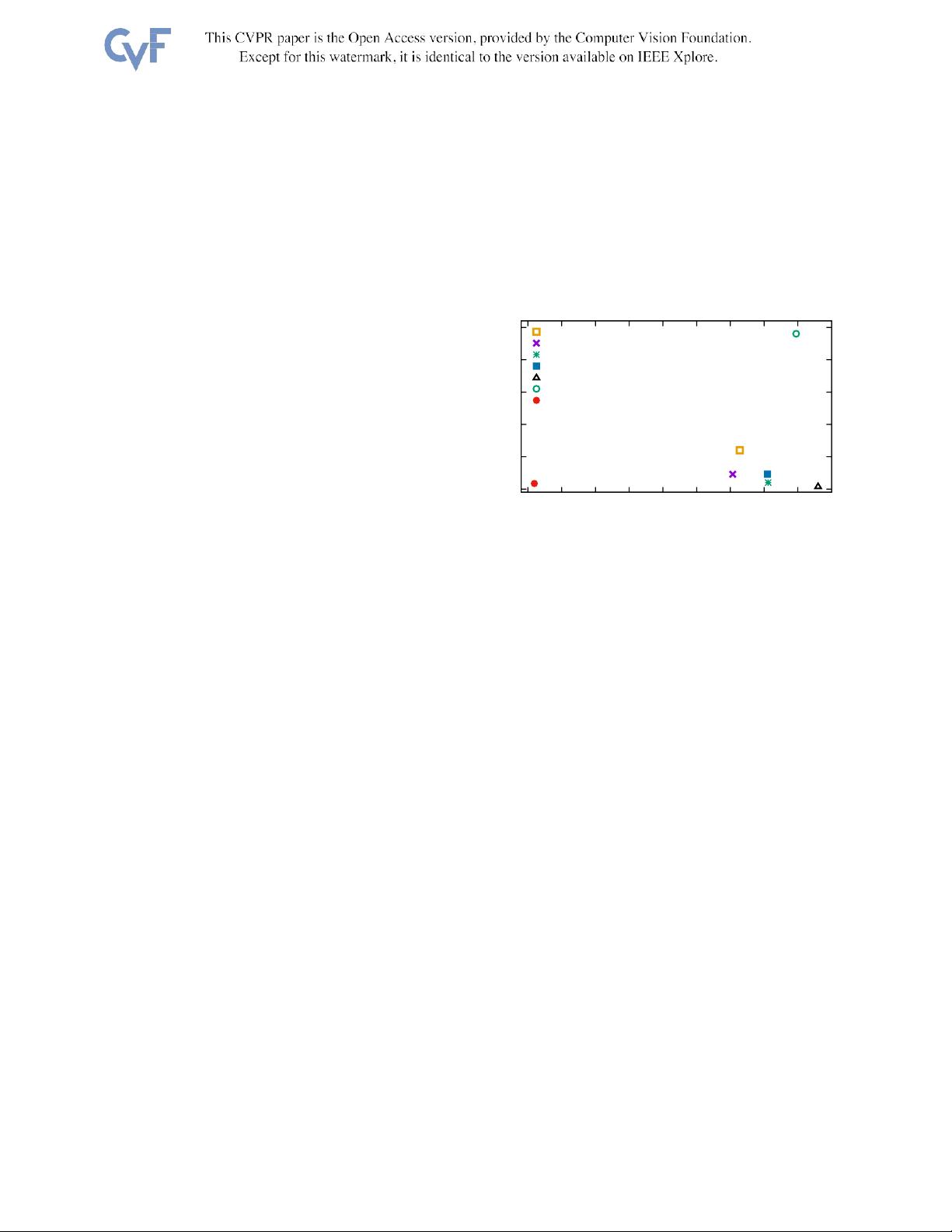
图1. Sintel基准测试中的精度与运行时间。我们比较排名靠
前的出版光流法。我们的方法更准确,同时保持有竞争力的
运行时间。
全成本体积,一个'la立体声,实际上是可行的,并且
该体积的常规结构支持使用全局优化技术[7]。然而,
这种方法的计算要求似乎使其不切实际,这是由于成
本量的构建和优化。目前还不清楚我们是否可以将最
先进的立体处理管道的成功结构转化为光流,而不会
导致严重的计算损失。
本文提出了一种光流算法,它可以将成本-体积法的
方便性和准确性我们的工作是基于学习嵌入到一个紧
凑的特征空间,这样的补丁之间的匹配分数可以计算
在这个空间的内积。我们表明,完整的四维成本体积
可以在几分之一秒的时间内构建 ,由于 它的规律
性。然后,我们通过将半全局匹配[16]适应于四维设
置来进一步利用这种规律性。尽管标签空间的大小,
它的规律性暴露了大量的并行性,可以利用它来保持
运行时间下降。通过将单应性拟合到图像区域并使用
这些来正则化流场来执行附加的后处理。
由此产生的管道在Sintel基准测试[6]上达到了最高
的报告准确度,同时保持了有竞争力的运行时间。我
们的方法也显著地
1289
(
sec
)
下载后可阅读完整内容,剩余8页未读,立即下载
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
