2米以上翼展仿生飞行机器人:HIT-Hawk与HIT-Phoenix
PDF格式 | 19.5MB |
更新于2025-01-16
| 104 浏览量 | 举报
本文主要探讨了大中型鸟类启发下的2米以上翼展拍翅飞行机器人的设计与开发。研究团队在哈尔滨工业大学深圳校区机械与动力工程学院和机器人与系统国家重点实验室合作,针对大中型鸟类如鹰和凤凰的飞行特性,研发了两款名为HIT-Hawk和HIT-Phoenix的机器人。这些机器人的设计过程充分借鉴了生物力学和空气动力学原理,特别是基于薄翼理论对飞行控制进行建模。
首先,文章详细回顾了大中型鸟类的飞行机制,包括其翅膀结构、飞行姿态控制以及动力来源,以此为基础进行仿生设计。研究者们重点考虑了如何在保持飞行稳定性的同时,实现高效的飞行性能,这涉及到机械结构的设计,如翼展的长度和角度、重心位置等,以确保机器人在飞行中的横向和纵向稳定性。
在控制系统方面,文章提出了自主飞行控制方法,该方法在机载控制器中实现了高度集成,同时满足了在小型化、轻量化以及低能耗方面的严格要求。通过实验验证,HIT-Hawk的翼展为2.0米,重量1.15千克,使用3SLiPo电池可以实现65分钟的最大稳定续航时间;而HIT-Phoenix的翼展稍大,为2.3米,重量更轻,为0.86千克,但续航时间相对较短,为8分钟,使用3S LiPo电池。尽管这两款机器人都具有较强的抗风能力,能够抵抗4级风力,但与模仿小型昆虫或小鸟的拍翅飞行器相比,它们在载荷能力、抗风能力和续航时间上表现出更强的优势。
本文不仅展示了仿生智能与机器人技术在大中型鸟类飞行模式上的应用,还强调了在复杂环境中模拟自然生物飞行特性的实用价值,这对于未来无人机设计、环境监测、搜索与救援等领域具有重要意义。通过这种研究,科研人员有望推动拍翅飞行机器人技术的发展,使之在功能和实用性上进一步提升。
𝑤 =
𝑣 + 𝜆 = 𝑢
0
𝜕ℎ
+
𝜕ℎ
+ 𝑣
0
+ 𝑣
1
𝑥
(1)
ℎ = ℎ
𝑛
cos(𝑛𝜑) (2)
ℎ
𝑛
= 𝑘∕(𝑔 + 1) ⋅
∫
𝜋
0
ℎ(𝜑) cos(𝑛𝜑)𝑑𝜑 (3)
𝑘 =
1 𝑛 = 0
2 𝑛 > 1
(4)
𝒉
𝑛
= 𝑻
𝑔
⋅ 𝒉
𝜑
(5)
𝑻
𝒈
=
1 1 1 ⋯
cos 𝜑
1
cos 𝜑
2
cos 𝜑
3
⋯
cos 2𝜑
1
cos 2𝜑
2
cos 2𝜑
3
⋯
⋮ ⋮ ⋮ ⋱
(6)
𝛥𝑃 = 2𝜌 𝜏
0
(
1 − cos 𝜑
)
∕ sin 𝜑 + 𝜏
𝑛
sin
(
𝑛𝜑
)
(7)
3
0
E.Pan,H.Xu,H.Yuanetal.BiomimeticIntelligenceandRobotics1(2021)100002
0
图2.大型鸟类的滑翔飞行类似于固定翼飞机的飞行。
0
图3.拍打影响翅膀的实际迎角和空速。
0
其次,当鸟类飞行时,其翅膀所经历的实际空气速度是身体前进运动和翅膀相对于
身体的拍打运动的组合。这两种运动的组合将改变翅膀周围的气流。改变的参数,
如翅膀的速度和迎角,如图3所示,将导致翅膀处于相当不稳定的气流中,使得鸟
类能充分利用高升力机制。相对而言,固定翼飞机周围的气流要稳定得多。鸟类和
固定翼飞机在飞行中的气流差异也导致了两者之间飞行效率和性能的很大差异。
0
总的来说,鸟类是固定翼飞机的灵感来源
0
飞行器和固定翼飞机在一定程度上是鸟类飞行方式的特殊表现。关于固定翼飞机的
完善程度和发展,以及自然界中鸟类的飞行特性,我们在拍打式机翼飞行器的设计
过程中参考了固定翼飞机的设计原则。在动态产生升力和推力的前提下,使用等效
的上反角来保持横向稳定性,并使用传统的气动布局和尾翼来实现纵向稳定性和机
动性。
0
3.气动力学的计算方法
0
3.1.薄翼型理论
0
薄翼型理论是一种计算气动力的方法
0
在上个世纪流体力学理论的转化基础上,推导出了低速状态下薄翼型的气动力学理
论。此后,PetersDavid
A.等人引入了一种状态空间理论模型,基于经典薄翼型理论计算气动力[16]。在本
节中,我们介绍了基于Peter提出的理论的拍打式机翼气动模拟和计算方法[17]。
该理论可以用动态方程的矩阵形式表示,并且可以很容易地与
0
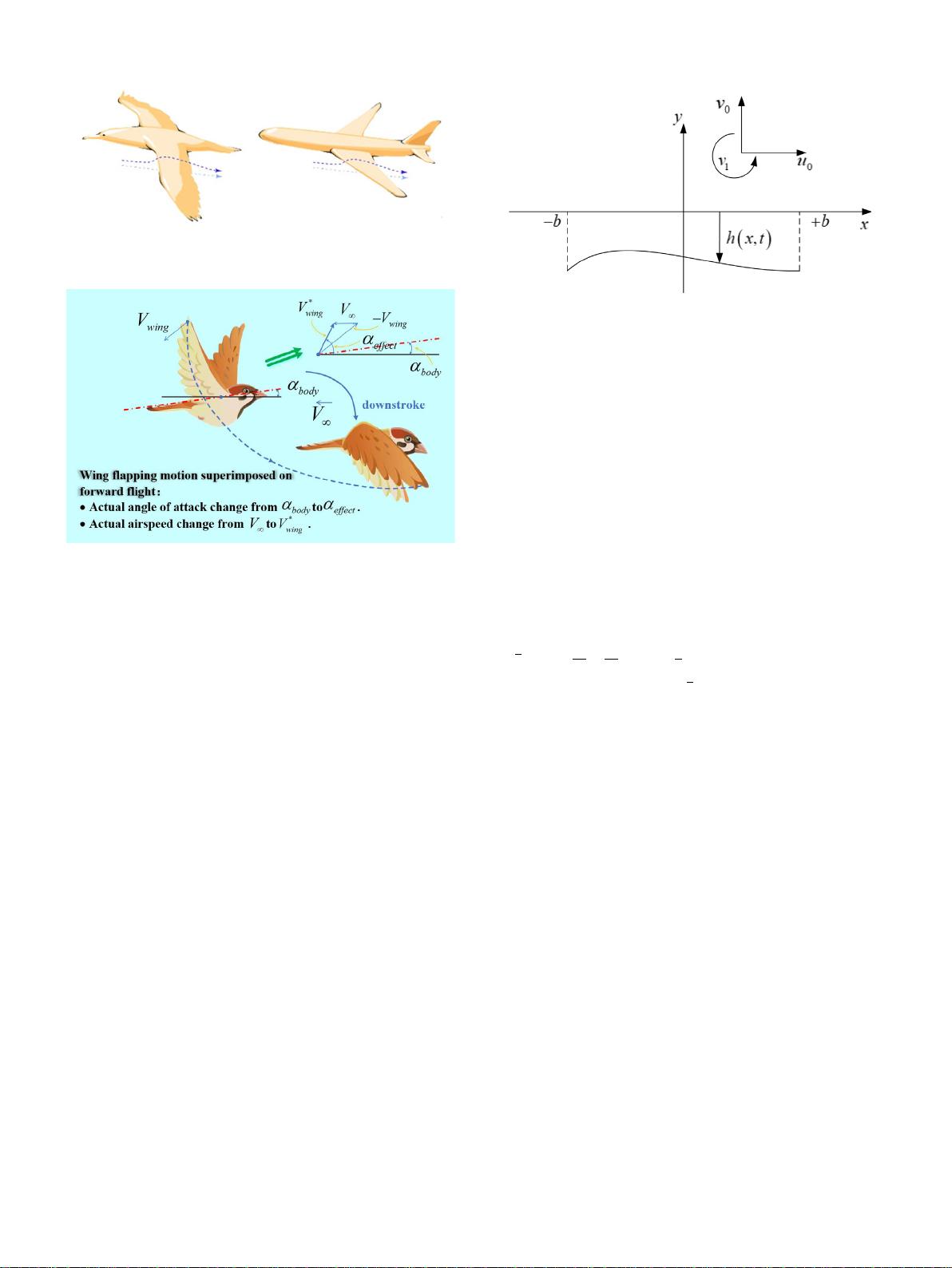
图4.翼型坐标系。
0
结构动力学方程。最重要的是,这种方法不需要像计算流体力学(CFD)方法那样
长时间的计算和大量的计算资源,并且可以轻松用于振翅飞行器的动态模拟和控制
律设计。
0
首先,如图所示建立翼型坐标系
0
图4.
翼型弦线平行于轴,中弦与轴重合,我们定义翼型在平面内有任意平面摆动运动。
沿着正轴方向的风速分量定义为0,沿着正轴方向的风速分量定义为0。由于坐标
系旋转引起的速度梯度为1,我们定义逆时针为正方向。然后垂直速度可以表示为
0+1∕,其中是半弦长。翼型的变形(′,)沿着轴的负方向是正的。
0
然后非穿透边界条件可以直接写成
0
如
:
0
其中,是总诱导流,是由尾迹环流引起的诱导流的一部分,是由束缚环流引起的诱
导流的另一部分。
0
令=arccos(∕),然后使用格劳特变换,我们可以得到:
0
其中,是格劳特展开的阶数。根据高斯-切比雪夫积分公式,可以表示为:
0
在上述公式中,是每个翼型上的高斯点的数量,
0
而且,是每个高斯点的位置函数。它可以用矩阵形式表示:
0
其中,是一个(+1)×的积分矩阵:
0
使用格劳特变量,压力分布
0
将是:
0
无穷
大
总和
剩余12页未读,继续阅读
相关推荐



11 浏览量
8 浏览量
4 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
