平地行走外骨骼交互力评估:一种无传感器的运动学方法
71 浏览量
更新于2025-01-16
收藏 1.94MB PDF 举报
"外骨骼仿生智能与机器人的平地行走力估计方法"
本文主要探讨了在仿生智能领域,特别是外骨骼控制方面的力估计技术,针对平地行走时穿戴者与外骨骼之间的交互力进行研究。传统的力传感器测量方法存在价格高、易受损以及因个体差异导致的定位困难等问题。因此,研究团队提出了一种基于运动学数据的新型评估方法,以计算用户在行走过程中下肢与被动外骨骼连杆间的交互力。
首先,文章介绍了交互力评估的重要性,特别是在外骨骼设备控制策略的开发中,准确获取穿戴者与设备的交互力至关重要。然而,现有的直接测量手段面临诸多挑战,如传感器的耐用性和定位准确性。
接着,作者提出了一种创新的无传感器方法,利用双层优化框架的标记细化算法来提高运动学数据的精度。这种方法无需昂贵的力传感器,而是通过分析人体肢体与外骨骼连杆之间的相位延迟,运用弹簧模型来模拟两者之间的约束行为。弹簧模型的变形计算是基于运动学数据序列的,以此估算相互作用力。
实验部分,研究团队使用六名参与者进行实地测试,结果显示,提出的力估计方法能有效估计平地行走时的交互力。此外,通过对绷带位置的优化问题进行实例研究,进一步证明了这种方法获取交互信息的实用性。
这项研究为外骨骼控制提供了新的思路,通过运动学数据和弹簧模型的结合,能够在没有直接力测量的情况下,估计出人与外骨骼在行走过程中的相互作用力,这对于优化外骨骼的设计和控制策略具有重大意义。这一成果有助于降低外骨骼设备的成本,提升其适应性和可靠性,对于未来智能外骨骼在医疗康复、助力行走等领域的应用具有积极的推动作用。
M.
庞,智
-
地洛湾,巴西
-
地
Tang
等人
仿生智能与机器人
2
(
2022
)
100056
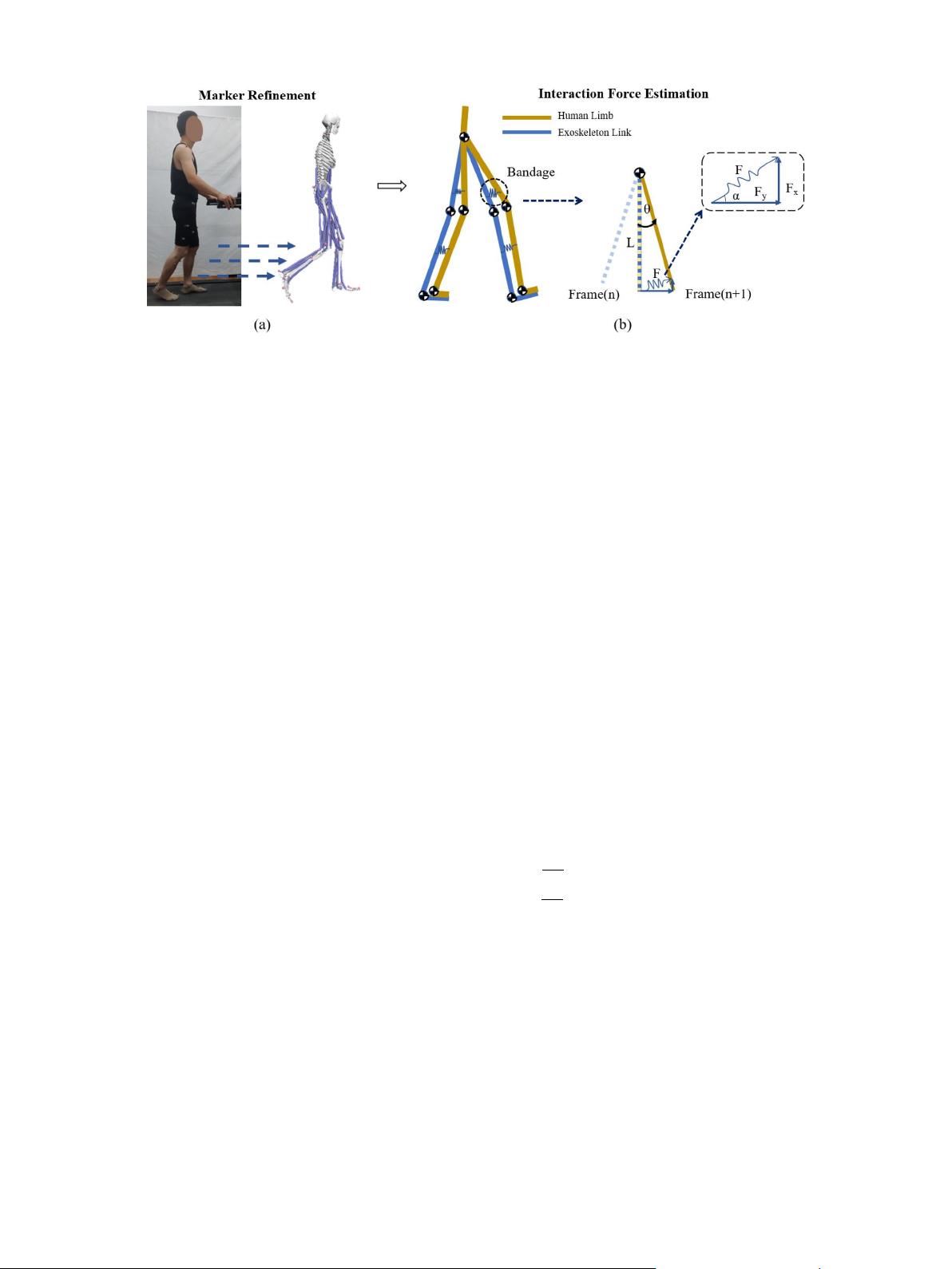
Fig. 1.
提出的方法框架。
第一步是细化虚拟模型中的标记位置以获得准确的运动学数据。
下一步是 用弹簧模型计算相互作用力,弹簧模型的挠度是在不同框架之
间估计的
上层实现算法来搜索虚拟标记的不同方向,最小化下层代
价函数的值。由于人体模型是在笛卡尔空间坐标中定义的,因此可
以在六个方向(即,、、、、和)。对于每个给定的
虚拟标记,上层中的算法的算法步骤如下:
第一步:在当前标记方向移动 后,执行较低级别的优化
以计算结果。如果结果更大,则放弃此步骤,并将标记的
坐标恢复为初始位置。相反的方向()将在下一步中搜索如
果结果变小,则在下一步中继续搜索正方向。
第二步:如果较低级别优化的结果在正方向和负方向上都变
大,则沿轴的搜索结束。记录步骤数并在步骤中使用。沿着轴
和轴的其他方向按照上述相同的方式进行搜索。值得注意的是,
每个搜索的步长对于每个方向被设置为
步骤:检查当前标记的所有六个方向是否被搜索。如果是的话,
我们就进入下一个阶段。然后执行步骤,直到搜索到所有标记
步骤:检查完所有标记后,将所有轴上所有标记的步数与预定义
的阈值数进行比较。如果所有的步数都小于给定的阈值,则搜索
停止。否则,执行步骤
所提出的标记细化方法的详细过程
显示
在
算法
中,
其中,
是
帧
处的
标记
的位置
,
并且
是
沿帧处的
标记
的方向的步数。
2.3.
基于运动学数据的相互作用力计算
为了简化问题,我们做了一些假设。首先,我们关注人体在矢状面
内的运动,而忽略其影响 因为行走主要发生在矢状面。第二,人类下
肢的几何形状是相同的 连接到相应的外骨骼连接。当外骨骼被良好地
机械调节时,可以保证该假设。第三,本文中提到的外骨骼是被动的,
不提供主动帮助。假设人类下肢通过使用弹性绷带连接到外骨骼链接,
弹性绷带被建模为以下弹簧单元:
其中f表示人的肢体与外骨骼连杆之间的拉力或相互作用力。k是弹簧参
数。传统方法是在许多可穿戴设备相关应用中将相互作用力建模为然
而,阻尼器部分在本研究中被忽略,因为它们被包括在人体模型的肌腱
部分中,并被计入正向动力学计算中。
图()示出了人体和外骨骼耦合系统的联动示意图。在此模型
中,外骨骼经由大腿及小腿系到人类受试者。该标注栏位于链接的中
点。图图()描绘了大腿部分的相互作用力估计的示意图。 在时间
处或在编号为的帧处,大腿和外骨骼大腿连杆分别处于由黄色虚线和
蓝色虚线表示的位置中。在下一帧中,人类大腿旋转到黄色实线所示的
位置。外骨骼是被动的,并且人的肢体用作致动器因此,外骨骼连杆被
由人的大腿运动引起的带伸长施加的弹性力拉动。外骨骼链接旋转到该
位置,如 帧中的蓝色实线所示。我们的运动捕捉系统的记录频率为
因此,每两帧之间的时间为 ,这被认为足够小,以表示人类
下肢和外骨骼链接之间的微小距离。因此,我们假设, 外骨骼在
帧中的位置与人体肢体在帧中的位置相同。
弹性带
产生
的拉力可以通过方程计算。式中,R1是人体肢体与外
骨骼连杆之间的偏转。如图()所示,外骨骼连杆和人体肢体构成等
腰三角形。因此,偏转
可将R1表示为
(
)(
)
其中是人体肢体与外骨骼链接之间的角度,其是帧与 帧之间的
关节角度的差。是从绷带位置到旋转中心的距离。
力的方向被认为是沿着弹性绷带的偏转,这意味着相互作用力的垂
直(
垂直
)和切向(切
向
)分量可以表示为
2.4.
结合模型参数确定
本文将人体下肢与外骨骼连杆之间的束缚行为建模为的
剩余12页未读,继续阅读
603 浏览量
280 浏览量
221 浏览量
141 浏览量
156 浏览量
163 浏览量
112 浏览量
179 浏览量
283 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网狐工具:核心DLL和程序文件解析
- PortfolioCVphp - 展示JavaScript技能的个人作品集
- 手机归属地查询网站完整项目:HTML+PHP源码及数据集
- 昆仑通态MCGS通用版S7400父设备驱动包下载
- 手机QQ登录工具的压缩包内容解析
- Git基础学习仓库:掌握版本控制要点
- 3322动态域名更新器使用教程与下载
- iOS源码开发:温度转换应用简易教程
- 定制化用户登录页面模板设计指南
- SMAC电机在包装生产线应用的技术案例分析
- Silverlight 5实现COM组件调用无需OOB技术
- C#实现多功能画图板:画直线、矩形、圆等
- 深入探讨C#语言在WPF项目开发中的应用
- 新版2012109通用权限系统源码发布:多角色用户支持
- 计算机科学与工程系网站开发技术源码合集
- Java实现简易导出Excel工具的开发教程
