TITAN:未来轨迹预测与代理重要性机制
PDF格式 | 1.28MB |
更新于2025-01-16
| 15 浏览量 | 举报
"本文主要研究了未来轨迹预测及代理重要性机制,提出了一种名为TITAN的新模型,该模型利用行动先验来预测智能体的未来轨迹和自我运动。文章介绍了TITAN数据集,这是一个包含700个标记视频片段的大型数据集,用于训练和评估模型。此外,文章还提到了代理重要性机制(AIM),该机制能评估每个代理对未来自我轨迹的相对影响,提供感知风险评估的见解。"
在自动驾驶和智能交通系统领域,未来轨迹预测是一项关键技术。TITAN(Trajectory Inference using Targeted Action Priors Network)模型正是为解决这一问题而设计的,它融合了智能体过去的位置、动作和环境上下文信息,以预测其未来的路径和运动状态。这种预测能力对于自主系统的实时决策和战略规划至关重要,特别是在复杂的城市交通环境中。
TITAN数据集是为了解决缺乏适合未来轨迹预测任务的数据集问题而创建的。该数据集包含了从东京繁忙交通场景中收集的700个带有里程计信息的视频片段,视频中标注了多种元素,如车辆状态、动作、行人的年龄分组以及复杂的动作属性,这些属性有助于模型理解更深层次的行为模式,如简单的交通行为、交流动作和运输活动。
在TITAN数据集上进行的实验显示,TITAN模型相比于基准和最先进的算法有显著的性能提升。这表明模型能更准确地预测智能体的未来轨迹,从而提高自动驾驶系统的安全性与效率。
此外,文章提出了代理重要性机制(Agent Importance Mechanism, AIM),这是一个创新的模块,可以量化每个代理对预测轨迹的影响程度,这对于感知风险评估具有重要价值。AIM可以帮助系统识别哪些其他道路使用者对当前车辆的行驶路径可能产生最大影响,从而提前应对潜在危险。
"未来轨迹预测及代理重要性机制的研究"为智能交通系统的动态决策提供了理论基础和技术支持,TITAN模型和AIM的提出,有望推动自动驾驶技术在复杂交通环境中的智能化水平。
11188
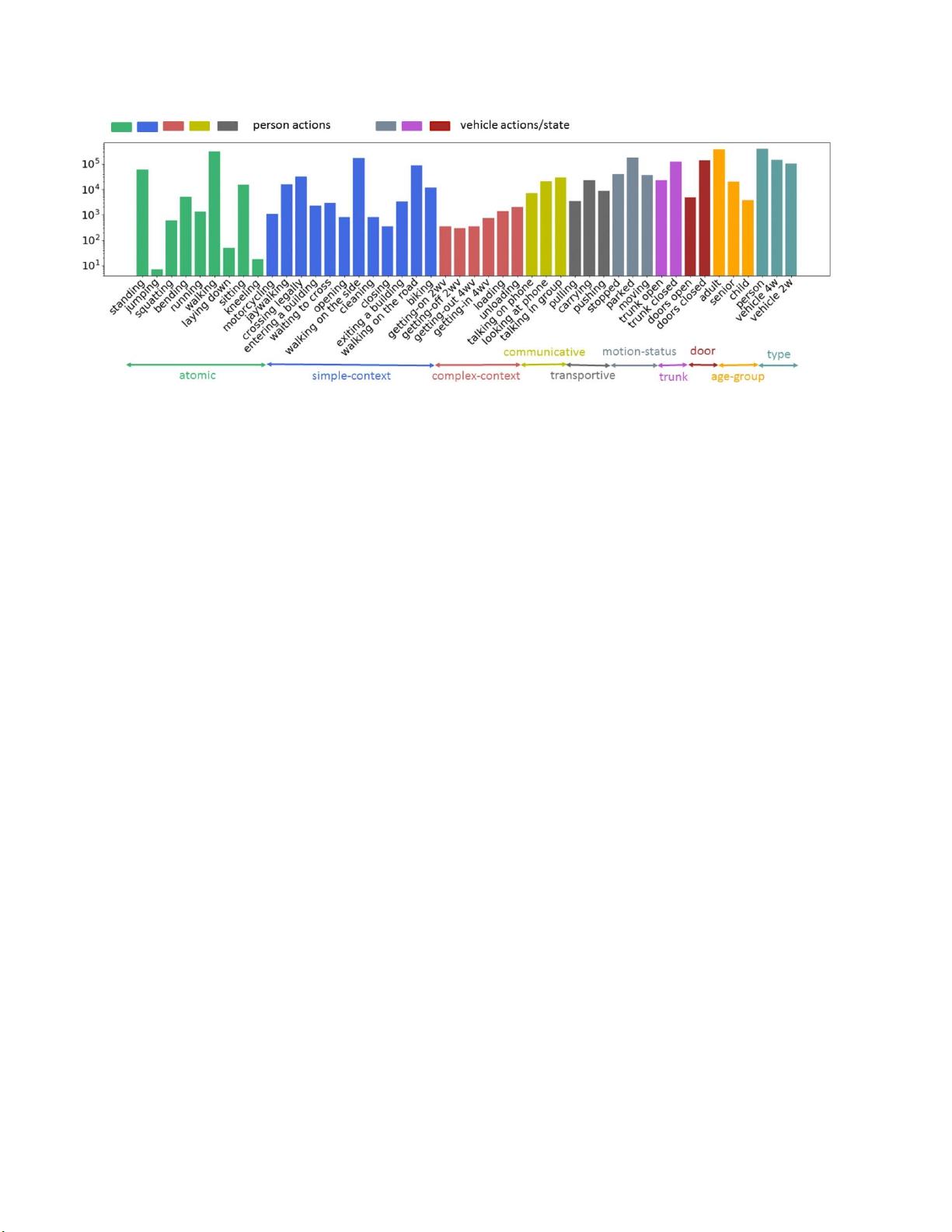
图
2.
根据人员动作、车辆动作
/
状态以及年龄组和类型等其他标签分类的标签分布
深度3D网络除此之外,其他方法捕获了演员和上下文
特征之间的成对关系[49]或空间和时间中像素之间的
关系[55]。最近,Timeception [19]对长范围的节奏依赖
性进行了建模,特别关注复杂的动作。
2.3.
数据集
未来的轨迹几个有影响力的基于RGB的行人轨迹预测
数据集已在文献中报道。 这些数据集通常由 固定
监视摄像机[27,37,34],或从静态无人机安装摄像
机获得的鸟瞰图[41]。在驾驶场景中,最初引入基于
3D点云的数据集[15,36,23,5,1,9]用于检测,跟
踪等,但最近也用于车辆轨迹预测。此外,[58,8]提
供了从移动车辆的自我中心视图捕获的RGB图像,并
应用于未 来轨迹预测问 题。JAAD [39],CMU-UAH
[33]和PIE [38]数据集与我们的TITAN数据集最相似,
因为它们旨在研究车载物体的意图和动作。然而,他
们的标签仅限于简单的动作,如行走,站立,观看和
穿越。因此,这些数据集没有提供足够数量的动作用
作先验,以发现智能体运动行为的上下文含义为了解
决这些局限性,我们的TITAN数据集提供了50个标
签,包括车辆状态和动作、行人年龄组以及目标行人
动作属性,这些标签按照补充材料中的说明进行了分
层组织
动作识别各种数据集已经被引入到具有单个动作la的
动作识别中,
bel [24,48,20,32,21]和视频中的多个动作标签
[43,59,4最近发布的数据集,如AVA [16],READ
[14]和EPIC-KITCHENS [12]包含在人或物体周围具有
相应定位的动作。我们的TITAN数据集与AVA相似,
为每个代理提供多个动作标签的时空定位。然而,
TITAN的标签是分层组织的,从原始的原子动作到复
杂的上下文活动,这些活动通常是从驾驶场景中的车
载车辆上观察到的。
3.
TITAN数据集
在缺乏适合我们任务的适当数据集的情况下,我们
引入TITAN数据集来训练和评估我们的模型,并加速
轨迹预测的研究。我们的数据集来自东京市中心以60
FPS录制的10小时视频。所有视频都是使用GoPro Hero
7相机拍摄的,该相机带有嵌入式IMU传感器,可在
100 HZ下记录同步的里程计数据,用于自我运动估
计。为了创建最终的注释数据集,我们从原始(原
始)记录中提取了700个短视频剪辑每个片段的持续时
间在10-20秒之间,图像大小宽度:1920 px,高度:
1200 px,并以10 Hz的采样频率进行注释所选视频剪
辑的特征包括展现各种参与者动作和交互的场景。
数据集中所有标签的分类和分布如图2所示。注释
的 框架 总 数 约为 75 , 262, 其 中 包 括 395, 770 人 、
146,840辆4轮车辆和102,774辆2轮车辆。这包括8,
592名独特的人员和5,504辆独特的车辆。对于我们的
实验,我们使用400个剪辑进行训练,200个剪辑进行
验证,100个剪辑进行测试。如第2.3节所述,有许多
与移动性和驾驶相关的公开数据集,其中许多包括以
自我为中心的观点。然而,由于这些数据集不提供动
作标签,因此不可能对TITAN数据集与现有移动性数
据集进行有意义的定量比较。此外,关于动作定位数
据集(诸如AVA)的定量比较是不必要的,因为AVA
不包括自我,
剩余10页未读,继续阅读
相关推荐



cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现程序A的监控启动机制
- Delphi与C#交互加密解密技术实现与源码分析
- 高效财务发票管理软件
- VC6.0编程实现删除磁盘空白文件夹工具
- w5x00-master.zip压缩包解析:W5200/W5500系列Linux驱动程序
- 数字通信经典教材第五版及其答案分享
- Extjs多表头设计与实现技巧
- VBA压缩包子技术未来展望
- 精选多类型导航菜单,总有您钟爱的一款
- 局域网聊天新途径:Android平台UDP技术实现
- 深入浅出神经网络模式识别与实践教程
- Junit测试实例分享:纯Java与SSH框架案例
- jquery xslider插件实现图片的流畅自动及按钮控制滚动
- MVC架构下的图书馆管理系统开发指南
- 里昂理工学院RecruteSup项目:第5年实践与Java技术整合
- iOS 13.2真机调试包使用指南及安装
