




利用极化提升被动非视线成像:新策略与优势
178 浏览量
更新于2025-01-16
收藏 909KB PDF 举报
"偏振非视线成像技术研究与应用探讨"
在当今计算机成像领域,非视线成像(Non-Line-of-Sight, NLOS)是一项极具挑战性的目标,它旨在捕捉到摄像头视线之外的场景,仿佛具有“透视眼”般的能力。传统的NLOS方法包括飞行时间成像、波动光学、阴影检测以及机器学习等,但它们通常依赖于难以控制的探测照明,这限制了场景重建的精确度。
本文关注的是被动非视线成像,特别是那些不依赖外部光源,仅依靠物体间的光散射和反射来获取信息的情况。以往的研究着重于优化光传输矩阵,如通过创造高频阴影来减小矩阵的条件数,从而提高图像质量。然而,作者提出了一个新的视角,即利用偏振信息来改善这一过程。
关键发现是,当光线从特定倾斜角度反射时,其偏振状态会发生变化,这种现象被称为偏振轴旋转。通过分析这种线性偏振,研究者利用偏振器来调节光传输矩阵,从而实现对矩阵条件数的有效控制。这种方法被命名为“有效偏振角”,它依赖于视角的倾斜和光强度的变化。
论文的创新之处在于:
1. 首次尝试将偏振线索引入被动NLOS成像,通过理想化的布儒斯特角放置相机,使得反射光的线性偏振特性得以利用。
2. 发现偏振器的阻断轴会随视角倾斜和光强变化而变化,这一特性有助于增强基于遮挡器的被动NLOS效果,或者提升直接被动NLOS成像的性能。
3. 结果表明,尽管偏振光学器件可能会导致光衰减高达50%,但整体上,通过偏振NLOS技术,成像质量的提升超过了非偏振NLOS,这是一项具有重要意义的发现。
总结来说,该研究不仅提供了一个新的策略来调节被动NLOS的光传输矩阵,而且展示了偏振信息在提升非视线成像效果上的潜力。这为未来的光学成像系统设计提供了新的思路和可能的应用方向,尤其是在那些对成像质量要求极高,且受限于探测光照控制的场景中。"
2138
百分
之十
二
有效角
百分
之十
百
分
之
八
占
方位
0%
的
百
分
比
轴线
以前的方法条件方程。(
3
):也许减少条件数的最简
单方法是使用 良好的双向反射分布函数(BRDF)。
一个平凡的例子是镜子,它使最低的条件数,因为光
传输矩阵是一致的。一个相反的例子是漫反射墙,它
会产生一个非常大的条件数,因为单个光源会影响所
有相机像素。使用具有镜面反射性的其他材料的条件
是在镜子和漫射壁之间,因为它们以某种方式保留了
高频分量。关于这个问题的讨论可以在[20]中找到。
另一种改善条件反射的方法是在场景中放置障碍物
Saunders等人[39]在摄像机和墙壁之间放置一个任意的
障碍物来阻挡光线。这使得墙壁上的阴影,其中包含
高频信息。欲了解更多细节,读者可以参考使用障碍
物的论 文[39 , 53,15] 。这两 种方法都 可以修 改场
景。
4.
光传输:偏振NLOS成像
我们的目标是最大限度地减少修改的场景条件方程
3使用偏振。因此,我们只在相机侧使用偏振器。该方
法还能够调节使用部分遮挡物的现有方法。如果将部
分遮挡物放置到场景是可容忍的,则结合现有方法和
所提出的方法进一步改进了条件
通过在相机前面放置偏振器,光路的小角度差产生
大的强度变化,因此与没有偏振器的正常观察本文的
一个关键观察换句话说,
(a)
俯视图(b)斜视图
(c)俯视图 (d)斜视图 (e)泄漏模式
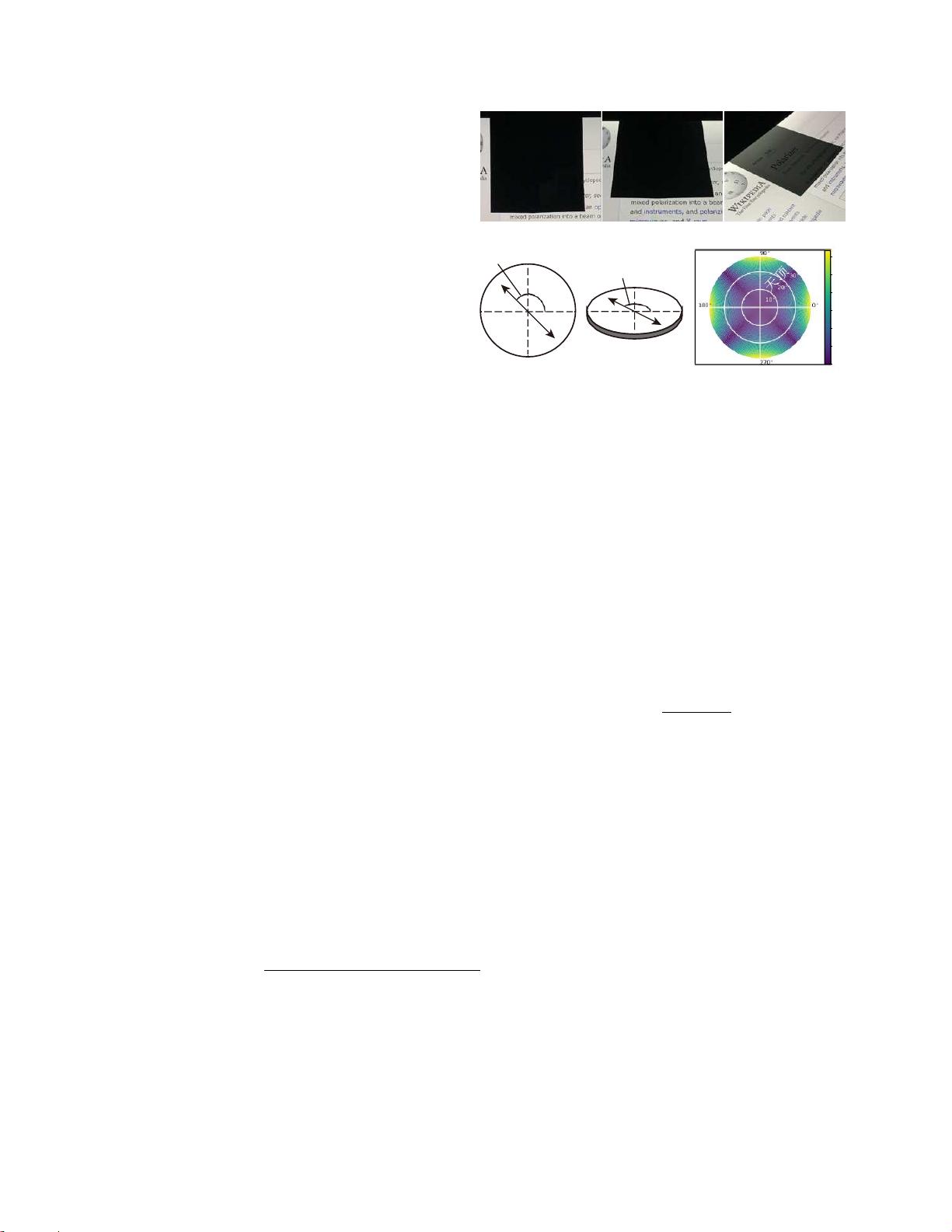
图2 : 偏 光片 的 斜视 图 。虽 然LCD 显 示器 从 顶视 图
(a)不可见,但从某些倾斜视图(取决于天顶角和方
位角)可略微看到(b)。(c)偏光镜从顶视图的原始角
度。(d)斜视的有效角度。偏振器轴略微倾斜。(e)从斜
视角观察正交偏光片的漏光图样。这些偏振器
ray.图2(a,b)显示了同一场景的俯视图和斜视图。
虽然来自LCD的光在顶视图上被阻挡,但即使偏光器
被交叉放置,从斜视图也可以略微看到LCD的内容。
这种效应是角度相关的,因此它可以用来分析NLOS观
测。
由于偏振器的有效角度由于光线的方位角和天顶角
而改变,因此发生光泄漏。根据几何计算
1
,来自入射
光视点的有效角θ
′
表示为
垂直光线被阻挡,而倾斜光线通过偏振器。在下面的
部分中,我们揭示了偏振光传输是如何在
tan
θ
′
=−
cos
(
z
)
tan
(θ−a)
、
(
四)
被动非视距成像
极化NLOS场景如果NLOS场景本身是极化的,那么我
们可以利用交叉极化效应来进一步改进NLOS问题。更
多细节参见补充材料。
4.1.
起偏器有效角
我们引入了偏振器的有效角,这在LCD开发领域得
到了很好的研究[54,34]。当光线倾斜于偏振器时,
即使两个线偏振器交叉放置,光也会“泄漏”。这
其中θ是原始偏振器从顶视图看偏振器由于θ
′
是偏振器
和偏 振光之间的角度,因此它在0和π/2之间 。图2
(c-e)示出了偏振器的原始角度和有效角度以及交叉
偏振器的光泄漏图案。这种模式可以用来改善NLOS成
像。
4.2.
粗糙表面
现在,我们考虑粗糙表面上的偏振光输运模型。在
本文中,我们采用了粗糙表面的微刻面模型,如图1的
插图所示。
是因为偏振器的有效偏振轴
取决于入射光的方位角和天顶角
1
有关更多详细信息,请参阅补充材料。
下载后可阅读完整内容,剩余11页未读,立即下载
2014 浏览量
107 浏览量
2021-09-19 上传
2021-03-15 上传
2021-09-15 上传
2021-10-03 上传
106 浏览量
点击了解资源详情

cpongm
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Sangria RxScala集成指南与最新SBT配置
- MCP2200ctl: USB转UART转换器控制程序的功能与应用
- 游戏开发者的异步管道持久性框架
- NSQ 1.0.0跨平台版本发布:Windows与Linux兼容
- 自动加载店铺分类图片代码实现与应用
- Java实现八进制转十进制的编程方法
- CAS-Unity:Unity移动广告插件的简易集成方案
- Python实现Excel姓名随机抽奖程序
- Kpop Nu’est壁纸与Chrome新标签页插件发布
- 探索.NET XML处理库与工具大全
- ESP8266驱动16*16点阵显示并自动校时
- 站长俱乐部新闻发布系统虚拟主机版v1.85升级介绍
- Docker环境授权访问检查工具
- 自然风景主题网站模板设计与展示
- Xavier: 面向对象的XML库支持Lazarus和Delphi
- C语言基础入门:掌握简单代码编写





















