非刚性3D形状到图像匹配的组合优化方法
PDF格式 | 17.43MB |
更新于2025-01-16
| 19 浏览量 | 举报
"非刚性3D形状到图像匹配的组合解决方案"
这篇论文提出了一个创新的组合方法来解决非刚性3D形状与3D图像数据的匹配问题。非刚性匹配是指允许形状在匹配过程中发生形状变化,而不仅仅是简单的平移、旋转或缩放。在传统的刚性匹配中,3D形状被视为不可变形的整体,但在非刚性匹配中,形状可以灵活地适应图像的特征。
该方法将3D形状建模为三角网格,并允许每个三角形独立地进行刚体变换,即旋转和平移,以尽可能地匹配图像数据。通过引入数据项和平滑项,算法能够平衡形状与图像的一致性和形状自身的连续性。数据项Ei(τi)衡量变换后三角形与图像的匹配程度,而平滑项Eij(τi,τj)则惩罚相邻三角形变换的差异,确保整体形状的连续性。
优化目标函数E(τ)由所有三角形的数据项之和及相邻三角形之间的平滑项之和构成,这个函数的最小化过程是一个大规模且NP难的问题。为了处理这个问题,论文采用了图论的方法来解决这个组合优化问题,同时提出了在6维Lie群SE(3)上的高效离散化策略。这种方法的独特之处在于,它不依赖于良好的初始猜测,而且能够找到全局最优解的范围。
论文中,作者们面对的两个主要挑战是大规模组合优化问题的求解和SE(3)的离散化。他们成功地解决了这两个问题,并将提出的算法应用于非刚性3D形状到形状的配准以及非刚性3D形状到图像的配准任务中,实验结果表明,这种方法能够提供有前景的匹配效果。
1. 引言部分指出,形状与图像的匹配在计算机视觉和图像分析领域具有重要意义,广泛应用于图像分割和物体检测等任务。早期的研究主要关注线性或刚性变换,而非刚性匹配的复杂性增加了匹配的难度,但同时也提高了适应性,使得模型能够更好地适应实际场景中的形状变化。
这篇论文提出的组合解决方案为非刚性3D形状到图像匹配提供了一种新的、全局优化的方法,有望在各种应用场景中提高匹配质量和鲁棒性。通过图论和Lie群的离散化技术,它克服了传统局部优化方法的局限,为未来相关研究开辟了新的方向。
τ
0
i
, τ
0
j
τ
i
, τ
j
1000
0
非刚性3D形状到图像匹配的组合解决方案
0
FlorianBernard1,2,3FrankR.Schmidt3JohanThunberg1DanielCremers3
0
1卢森堡系统生物医学中心,卢森堡大学,卢森堡2卢森堡中央医院,卢森堡3慕尼黑工业
大学(TUM),德国
0
(a)模板(3D表面网格)
0
(d)匹配的模板
0
(b)数据项(每个三角形)(c)平滑项(相邻三角形)
0
每个三角形的刚体
变换
0
3D图像
0
(低成本)τ0i∈SE(3)
0
Eij(τi,τj)Ei(τi)
0
三角形邻域
0
低成本
0
高成本
0
三角形Fiτi∈SE(3)
00
τi(Fi)τ0i(Fi)
0
E(τ)=
00
i=1Ei(τi)+
0
(i,j)∈E
Eij(τi,τj)
0
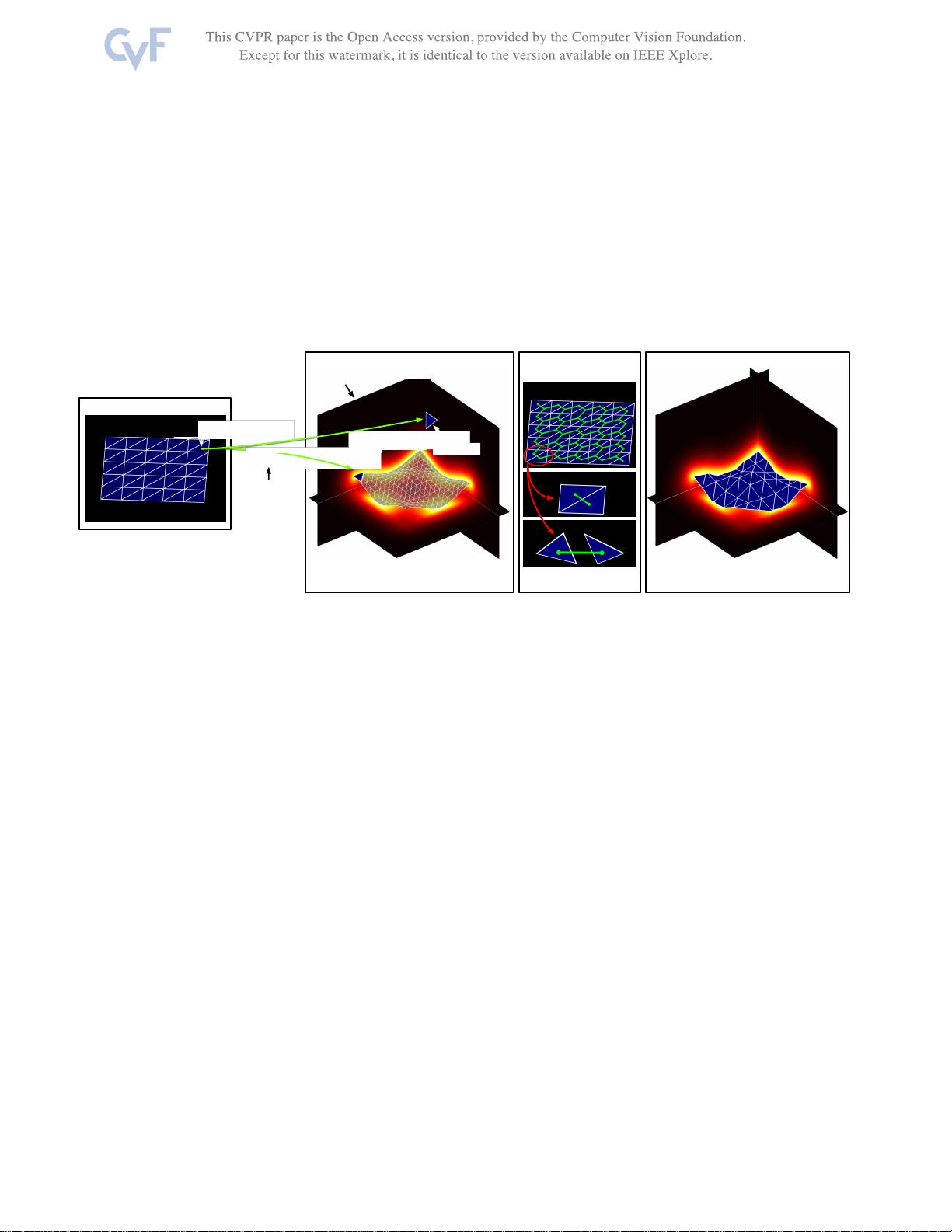
图1.3D形状到图像的匹配。(a)
给定一个三角网格形状,我们为每个三角形Fi关联一个刚性变换τi∈SE(3),以使数据项和平滑项的总和最小化。(b)
数据项Ei(τi)衡量变换后的三角形τi(Fi)与体积图像的匹配程度。(c)平滑项Eij(τi,τj)惩罚变换后的三角形τi(Fi)和τj(Fj)之间的差异。(d)
优化E给出了形状到图像的匹配。
0
摘要
0
我们提出了一个组合解决方案来解决非刚性匹配3D形状与3
D图像数据的问题。为此,我们将形状建模为一个三角网格
,并允许该网格的每个三角形进行刚性变换,以实现与图像
的合适匹配。通过对相邻三角形之间的距离和相对旋转进行
惩罚,我们的匹配在图像和形状信息之间进行权衡。在本文
中,我们解决了两个主要挑战:首先,我们用适当的图论方
法解决了由此产生的大规模和NP困难的组合问题。其次,
我们提出了对无界的6维Lie群SE(3)进行高效离散化的方法。
据我们所知,这是非刚性3D形状到图像匹配的第一个组合公
式。与现有的局部(梯度下降)优化方法相比,我们得到的
解决方案不需要良好的初始化,并且在最优解的范围内。我
们在非刚性3D形状到形状和非刚性3D形状到图像配准的两
个问题上评估了所提出的方法,并证明它提供了有希望的结
果。
0
1.引言
0
在计算机视觉和图像分析中,将形状模板与图像匹配是一个
经过深入研究的问题。它产生了许多应用,包括图像分割和
物体检测。图像中线条和参数化曲线的检测的早期方法是基
于投票的Hough变换[14],后来被推广到任意形状的检测[1
]。虽然Hough变换考虑了刚性形状,但在图像分割任务中
利用形状信息也已经在非刚性情况下得到了解决,包括基于
主动形状模型[10]、水平集[12]、凸形状空间[13]、多相图
割[58]或统计形状模型[19,
63]的方法。对于从单个2D图像重建物体形状,基于模板的
形状方法旨在通过3D到2D投影将给定的3D模板与图像匹配
[50,38,
46]。一些作者已经考虑了非刚性形状到图像匹配问题的组
合形式。
下载后可阅读完整内容,剩余9页未读,立即下载
相关推荐



cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 自动生成CAD模型文件的测试流程
- 掌握JavaScript中的while循环语句
- 宜科高分辨率编码器产品手册解析
- 探索3CDaemon:FTP与TFTP的高效传输解决方案
- 高效文件对比系统:快速定位文件差异
- JavaScript密码生成器的设计与实现
- 比特彗星1.45稳定版发布:低资源占用的BT下载工具
- OpenGL光源与材质实现教程
- Tablesorter 2.0:增强表格用户体验的分页与内容筛选插件
- 设计开发者的色值图谱指南
- UYA-Grupo_8研讨会:在DCU上的培训
- 新唐NUC100芯片下载程序源代码发布
- 厂家惠新版QQ空间访客提取器v1.5发布:轻松获取访客数据
- 《Windows核心编程(第五版)》配套源码解析
- RAIDReconstructor:阵列重组与数据恢复专家
- Amargos项目网站构建与开发指南
