网络控制机器人:协调、集中与分散方法的对比分析
2 浏览量
更新于2025-01-16
收藏 1018KB PDF 举报
"这篇研究论文对比了网络控制机器人在任务分配和碰撞避免中采用的协调、集中和分散方法。文章出自沙特国王大学学报,由Rameez Raja Chowdhary等人撰写。研究中提出了一种编排控制的机器人网络模型,该模型包括任务分配策略和一种无需通信的碰撞避免算法。通过对不同方法的比较,结果显示协调方法在通信带宽和性能一致性上优于分散方法,而在通信过载和任务执行时间上优于集中式方法。"
网络控制机器人(NCR)是当前科技领域的热门研究方向,涉及到多个自主系统协同工作,这些系统可以是分散式的,直接相互通信,也可以通过中心控制器集中管理。在分散式网络机器人系统中,每个机器人需要具备一定的智能和通信能力,以确保协作任务的有效执行。而集中式系统则由一个主控制器调度所有机器人的行动。
论文的重点在于任务分配模型,这是一个关键的元素,它决定了如何有效地将任务分配给机器人网络中的各个节点。模型的设计不仅要考虑任务的公平分配,还要考虑机器人之间的通信效率和碰撞风险。碰撞避免算法是另一个重要方面,它确保了在没有额外通信开销的情况下,平行运行的机器人能够避免相互碰撞。这种创新算法对于减少通信需求和提高系统的自主性至关重要。
在分析比较部分,研究使用了统计方法(配对签署和Wilcoxon签署秩检验)来评估协调、集中和分散方法的效果。结果显示,协调方法在整体性能上具有优势,特别是在保持通信带宽的高效利用和保持一致的性能水平方面。然而,当考虑到通信过载和任务完成速度时,协调方法比集中式方法更为优越。
这项工作对网络控制机器人的研究提供了有价值的见解,强调了协调方法的优势,同时也指出在特定情况下集中和分散方法的适用性。这对于优化多机器人系统的协同工作,尤其是在资源有限和环境复杂的环境中,具有重要的指导意义。未来的研究可能需要进一步探索如何在不同方法间找到最佳平衡,以适应更广泛的机器人应用。
R.R. Chowdhary
等人
/
沙特国王大学学报
1233
开始
没
是距离
dd
i
是
啊
移动
c
距离
将
θ
k
转向相邻机器人
取决于
V
max
,
V
nom
,
V
min
移动
c
距离
使
θ
k
远离相邻机器人
取决于
V
max
,
V
nom
,
V
min
开始
没
是距离
d>d
k
是啊
没
是距离
dd
i
是
啊
求出
d
的值
。
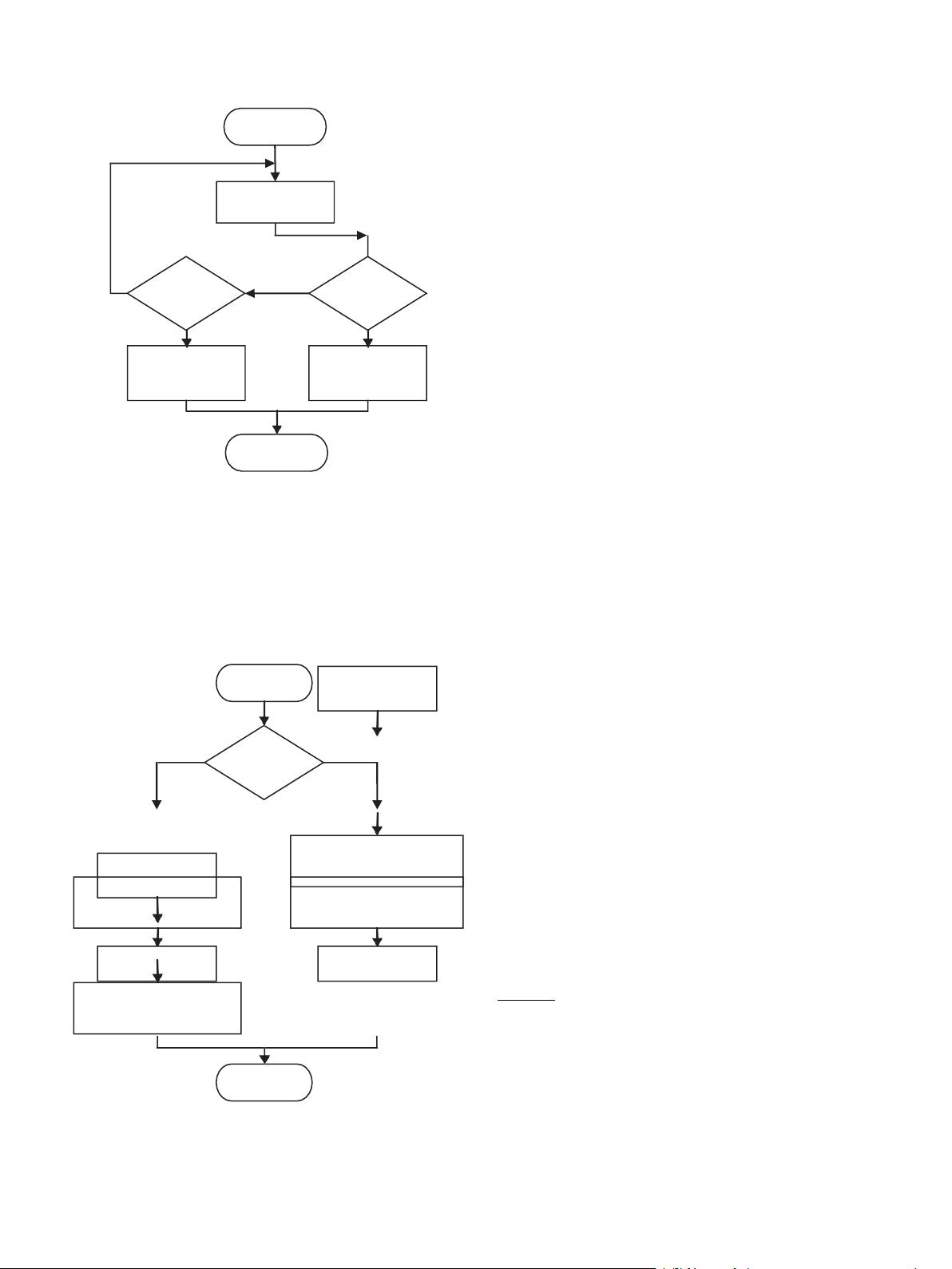
图二.距离测量算法
2.3.
RAT
算法
图3示出了RAT算法,其使RN保持在赛道的中心。当距离d >
dk
时,
意味着RN正在向实验环境的固体壁移动,并且可能与壁碰撞。第3节详
细描述了实验环境RAT算法还
避免了两个并行运行的RN之间的冲突,当d d
i
. RN
j
可以以三个速度V
max
(
j
)、
V
nom
(
j
)或
V
min
(
j)中的任何一个运行。 RN
j
花费t
nom
(
j
)
时间
以V
nom
(
j
)
的速度转动角度h
i
。类似地,RN分别以V
min
(
j
)和
V
max
(
j
)
的速度花费t
max
(
j)和t
min
(
j
)
时间。时隙的降序是t
max
> t
nom
> t
min
。在我
们的创新方法中,临界转弯角h
i
是RN左转或右转的基础RN不能转动小
于h i的这是RN的最小转弯限制。转向角h
1
是机器人
2
的速度和时间的函
数。
在该算法中,角度h
i
为15°,因为它正整除角度h
k
。转向的方向取决
于距离
di
和
dk3
。所有RN都可以向前、向后、向左和向右移动。
RAT算法使用等边直角三角形方法。为了保持轨道的中心线,RN需
要转向 在轨道上移动轨道的一半宽度的角度
hk
的角度 h
k
为45°,履带
宽度为1米。采用赤道直角三角形法计算轨道半宽b.这是一种几何方法。
RN通过转动h
k
角度远离相邻机器人以移动轨道的宽度b
来
避免碰撞,如
图4所示。RN行进c距离,而不是在轨道上移动宽度b。该技术帮助RN
保持恒定的速度,因为为了在轨道上移动距离b,RN需要急转弯,这降
低了RN的速度。距离c通过使用等式c2=(
a2
+
b2
)来确定。行驶距离c取
决于行驶时间。方程式
速度
=
距离
/
时间
给出时间。RN需要在行进距离c
之后在与先前的转向方向
4
相反的方向上转向h
k
角度,以在轨道上朝向终
点线直线移动,如图2所示。 图4A点。
RAT算法避免了RN的碰撞,并使RN保持在赛道的中心。图4显示了
一个等边直角三角形和RN的初始位置,
C. RN在C
5
处转动角度h
k
。虚线框示出了机器人在转动h
k
角度后的新位
置机器人从该位置行进距离c,如图所示。 四、 当机器人到达点A时,它
再次转动h
k
。
在相反的方向上的角度,以纠正对终点线的方向。RN在点
A处的新位置由实线框示出。
3.
实验细节
表
2
给出了实验和模拟中使用的参数。通常,测量以下三个参数,
以比较
NCR
中的结果。
1.
给定任务的任务执行时间
2.
在机器人网络中执行任务期间
RN
之间通信的消息数量
3.
机器人网络中所需的通信带宽
早期的 研究人员(Zhang和Collins,2012;Marin-Perianu等人,
2010; Ren和Sorensen,2008; Koes等人, 2006)已经采用了相同的
三个参数,而没有编排方法用于RN的固定以及可变移动速度。这里有
我没有重复他们的实验,因为不同的研究人员已经完成了不同类型的实
验进行比较。
端
图三
. RAT
算法使用等边直角三角形方法将
RN
保持在轨道中心并避免碰撞。
2
RN
的转向度(
h
i
)取决于速度(
V
max
(
j
)、
V
nom
(
j
)和
V
min
(
j
))和时间(
t
nom
(
j
)
、t
min
(
j
)和
t
max
(
j
))
。在相同的速度下,RN转30°比转15°
3
当
d d
i
时
,
RN
远离另一
RN
移动,并且当
d > d
k
时,
RN
朝向另一
RN
移动。
RN
在
C
点向左
转弯
45
度
,以
避免
与
其他
RN
发生碰撞,如图所
示
。
四
、
在
A
点
,
RN
再次从之
前的位置向
相反
方向
(右)
转向
4 5
度,以纠正朝向终点线的行驶方向。
RN检测到距离d小于点C处的di,然后它将RAT算法应用于转弯角
h
k
。
端
跟踪算法。
跟踪算法。
计算值
C
将
θ
k
角与前一个角度
取决于
V
max
、
V
nom
、
V
min
计算值
C
根据
V
max
、
V
nom
、
V
min
,将
θ
k
角
旋
转到与先前角度相反的方向
剩余10页未读,继续阅读
点击了解资源详情
247 浏览量
点击了解资源详情
2021-10-12 上传
2021-08-14 上传
2021-09-21 上传
2022-11-05 上传
119 浏览量
2021-08-11 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
