微小基线结构光:小型设备的3D成像新方案
PDF格式 | 15.57MB |
更新于2025-01-16
| 12 浏览量 | 举报
本文介绍了微小基线结构光(MSL),一种创新的3D成像技术,特别适合小型设备如手机和微型机器人。传统的结构光系统通常由一个投影仪和相机组成,通过大基线实现高精度的深度测量。然而,小基线的设备面临的问题是视差小,导致深度估计的难度增加。
MSL的关键在于利用小基线导致的小视差特性,简化了SL图像形成模型,使其近似为线性。这一理论成果称为MSL方程,尽管每个像素处有两个未知量(深度和反照率),该方程是欠定的,但可以通过局部最小二乘方法有效地解决。作者对MSL在不同投影模式、基线长度等系统参数下的性能进行了深入分析,并给出了优化性能的建议。
论文中还展示了一个实验原型,验证了理论概念的实际可行性。这个原型的构建和测试证明了MSL能够在有限的硬件资源和计算能力下实现有效的3D成像。此外,论文讨论了在小型设备上应用MSL的潜在领域,如智能手机无人机和内窥镜,这些设备受到空间、成本和计算能力的限制。
作者强调,虽然小基线带来了挑战,但MSL提供了一种计算效率高、硬件需求低的解决方案。这使得在小型设备上实现高质量的3D成像成为可能,为移动设备和微型系统的增强现实、导航、医学诊断等应用打开了新的可能性。微小基线结构光是一项重要的技术进步,它推动了3D成像技术在小型设备领域的边界。
1
4049
0
微小基线结构光
0
VishwanathSaragadam,JianWang,MohitGupta和Shree
NayarNYC研究实验室,SnapInc.
0
vishwanathsrv@cmu.edu,{jwang4,snayar}@snap.com,mohitg@cs.wisc.edu
0
摘要
0
我们提出了微小基线结构光(MSL),这是一种专为手机和
微型机器人等小型设备设计的新型3D成像方法。MSL使用
小型投影仪-相机基线和低成本投影硬件运行,并且可以使
用计算轻量级算法恢复场景深度。主要观察结果是小基线导
致小视差,从而使非线性SL图像形成模型的一阶近似成为可
能。这导致了本文的关键理论结果:MSL方程,SL图像形成
的线性化版本。由于每个像素处存在两个未知量(深度和反
照率),MSL方程是欠定的,但可以使用局部最小二乘方法
高效求解。我们分析了MSL在投影模式和基线等各种系统参
数方面的性能,并提供了优化性能的指导方针。凭借这些见
解,我们建立了一个原型来实验性地检验理论及其实用性。
0
1.引言
0
结构光(SL)是最常用的3D成像技术之一。由于硬件简单
且深度分辨率高,SL适用于各种应用,如3D建模,生物识
别,游戏和用户界面。典型的SL系统由一个投影仪和一个用
于成像场景的相机组成。通过在投影仪和相机像素之间确定
对应关系,可以通过三角测量计算每个场景点的深度。与所
有基于三角测量的方法一样,SL需要投影仪-相机对之间的
大基线才能可靠地估计深度[15,
31]。然而,有几个新兴应用越来越依赖于小型设备。想象
一下基于手机的增强现实
0
本工作在Snap的NYC研究实验室完成,并得到Snap
Inc.的支持。Vishwanath就职于卡内基梅隆大学电气与计算机工程系,Mohi
tGupta就职于威斯康星大学麦迪逊分校计算机科学系。
0
智能手机无人机
0
相机
0
相机
0
内窥镜
0
相机
0
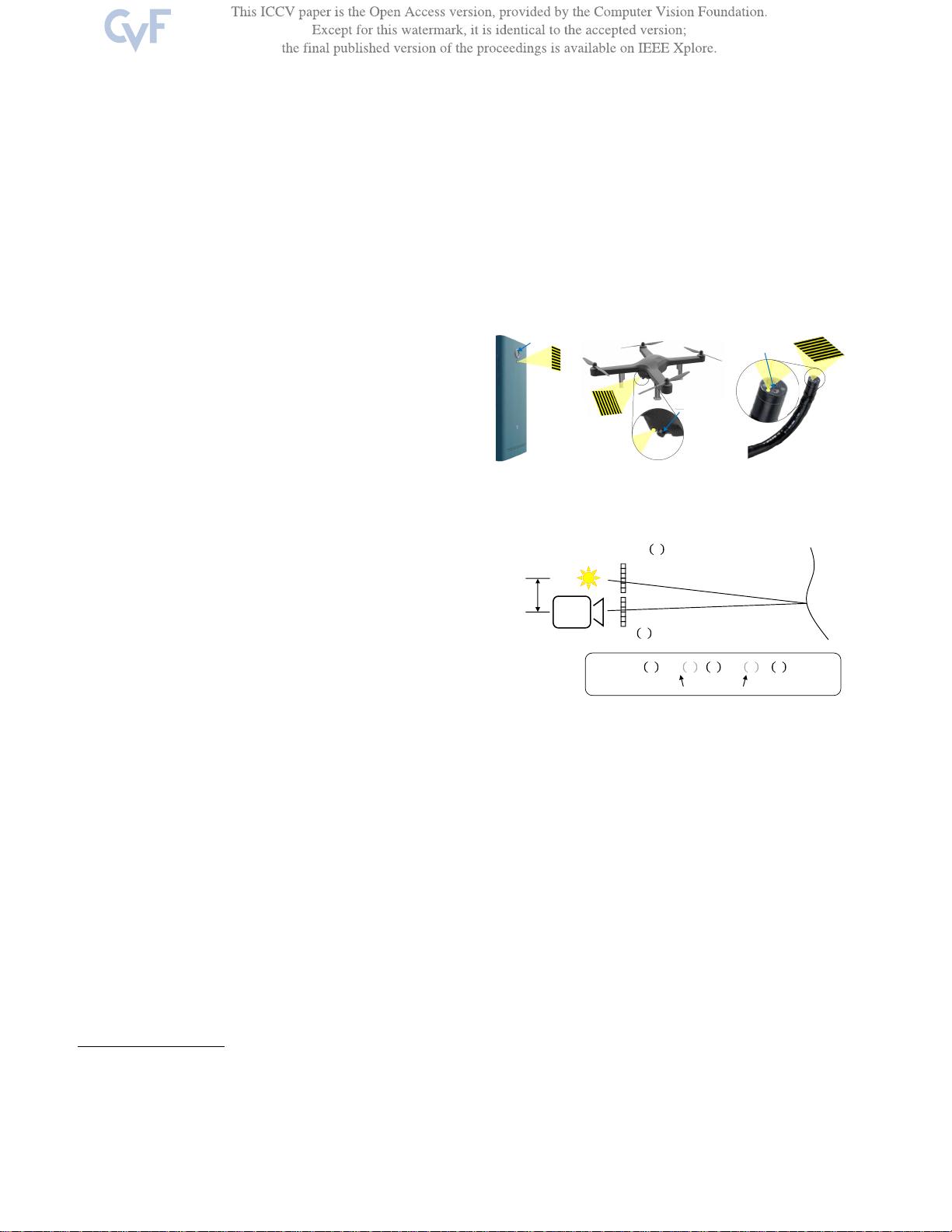
(a)受限设备上结构光面临的挑战:有限的基线,低设备复杂性,
低计算能力
0
线性化模型
0
相机I
0
静态掩
0
微小基线
0
LED场景
0
I=ρP+uP′
0
(b)提出的微小基线结构光
0
未知
0
P
0
图1:受限设备上的结构光。小型设备具有严格的约束条件,如(i
)小的投影仪-相机基线,(ii)具有有限功能的低成本硬件,以及
(iii)低计算能力。(b)我们提出了微小基线结构光,这是一种线
性化SL图像形成模型的新方法。这使得使用低复杂度投影设备进行
快速准确的深度恢复和轻量级计算成为可能。
0
(AR)应用程序构建其周围环境的3D模型[19,11,
29],或者微型无人机[22]在穿越茂密森林时识别树枝等障碍
物,或者薄型内窥镜[28]上的3D相机在人体内进行复杂手术
的辅助(图1(a))。由于它们的体积较小,这些设备无法
容纳大的基线,使得现有的SL方法难以恢复准确的场景几何
。
0
下载后可阅读完整内容,剩余9页未读,立即下载
相关推荐

665 浏览量


cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 自动生成CAD模型文件的测试流程
- 掌握JavaScript中的while循环语句
- 宜科高分辨率编码器产品手册解析
- 探索3CDaemon:FTP与TFTP的高效传输解决方案
- 高效文件对比系统:快速定位文件差异
- JavaScript密码生成器的设计与实现
- 比特彗星1.45稳定版发布:低资源占用的BT下载工具
- OpenGL光源与材质实现教程
- Tablesorter 2.0:增强表格用户体验的分页与内容筛选插件
- 设计开发者的色值图谱指南
- UYA-Grupo_8研讨会:在DCU上的培训
- 新唐NUC100芯片下载程序源代码发布
- 厂家惠新版QQ空间访客提取器v1.5发布:轻松获取访客数据
- 《Windows核心编程(第五版)》配套源码解析
- RAIDReconstructor:阵列重组与数据恢复专家
- Amargos项目网站构建与开发指南
