时空渐进学习:提升视频动作检测的精确度
146 浏览量
更新于2025-01-16
收藏 1.33MB PDF 举报
"时空渐进学习的动作检测器"
在视频分析领域,时空动作检测是一项关键任务,旨在识别视频中的特定动作并精确定位其在空间和时间上的位置。随着图像对象检测技术的发展,许多方法采用了两阶段框架来处理这一问题。然而,视频动作检测面临着比静态图像检测更为复杂的挑战,尤其是考虑到时间维度和动作的空间位移。
时空渐进学习(Spatio-Temporal Progressive,STEP)动作检测器是针对这些挑战提出的一种新框架。该框架从粗糙的初始动作建议开始,逐步通过多个步骤进行细化,以生成高质量的动作提案。在每一步中,模型利用前一步的回归输出来改进当前的建议,同时自适应地调整时间跨度,以便包含更多的相关时间上下文。这种方法能够自然地处理动作在空间中的移动,而无需在每个步骤中重新初始化。
传统方法通常在剪辑级别进行动作检测,即对短视频片段进行分析。尽管这些方法可以利用时间信息,但它们往往假设空间边界在剪辑内保持不变,这并不适用于具有显著空间位移的动作。相反,STEP框架允许动态调整时间和空间范围,以适应动作的变化。
在技术实现上,STEP可能采用了深度学习模型,如卷积神经网络(CNNs),结合循环神经网络(RNNs)或门控循环单元(GRUs)来捕获时间序列信息。这样的模型可以学习捕捉动作的连续性和动态特征,从而提高检测的准确性。
在性能评估方面,STEP在UCF101和AVA这两个标准数据集上取得了显著的成果,分别达到了75.0%和18.6%的平均精度(mAP),并且在3个渐进步骤中只使用了相对较少的初始建议。这表明,通过逐步学习和优化,STEP能够在减少计算资源消耗的同时提升检测性能。
总结来说,时空渐进学习的动作检测器是一种创新的视频动作检测方法,它有效地解决了视频中动作的空间位移和时间上下文的建模问题。通过逐步学习和自适应时间扩展,STEP提高了检测的准确性和效率,为视频分析提供了强大的工具。
266
我
我
我
我
我
(
p
,
l
)
算法
1
:针对剪辑
I
t
的
STEP
动作检测
输入:视频剪辑
I
,初始建议
B
0
,最大步长
S
max
.
S
Max
最大
值
S
输出:检测结果
(
p
i
,
l
i
)
i
=1
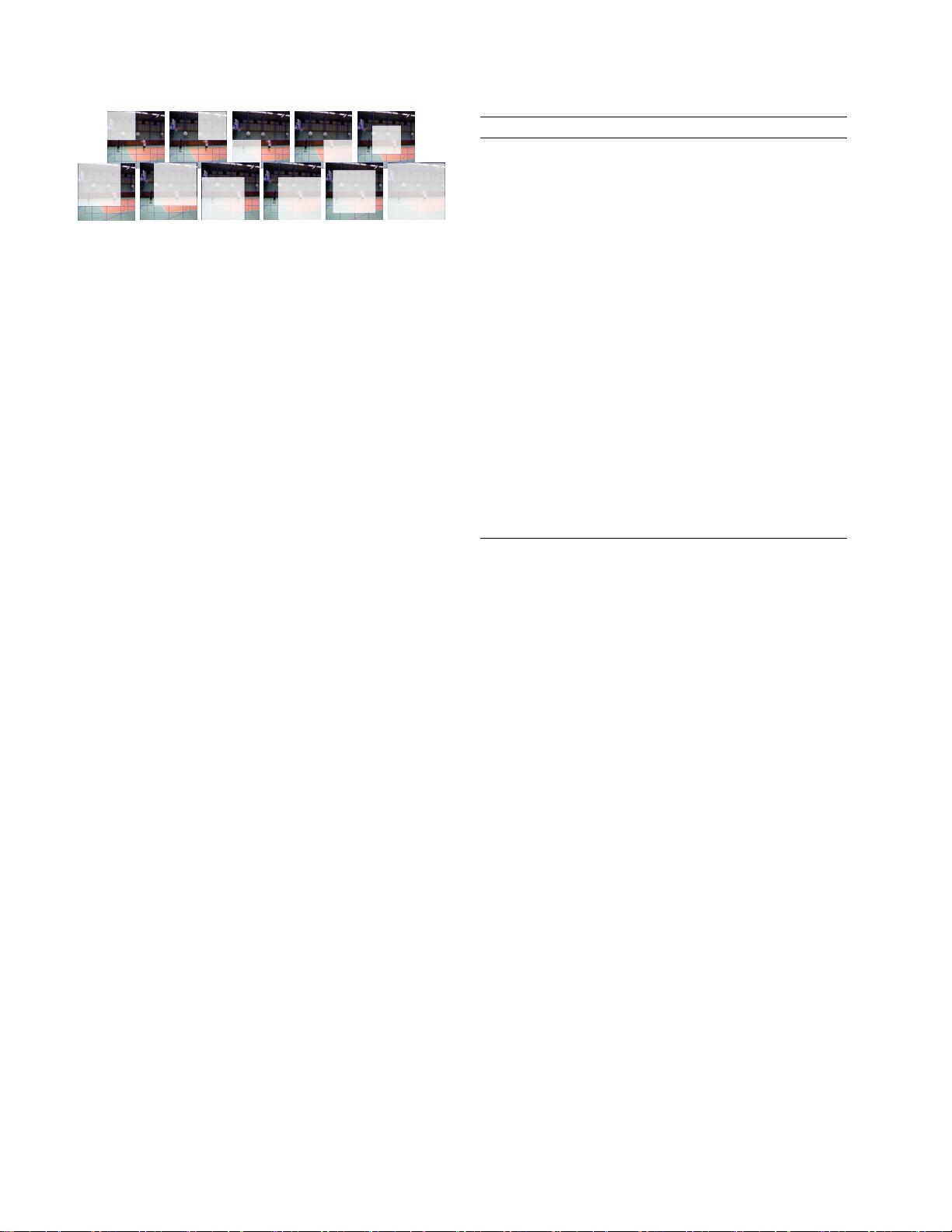
图2:11个初步提案的示例:随着时间的推移复制2D
盒以获得长方体。
1
提取视频片段的卷积特征
I
2
for
s
←1 to
S
max
do
3
如果s== 1,则
4 //初始提案
5
B
s
−
1
←
B
0
6
其他
7
//时间延长(第二节)3.3)
根据最大进度,用
K
帧剪辑
I
t
8
步骤
Smax
,我们首先提取卷积特征
B
s
−
1
←
Extend
(
B
s
−
1
)
对于一组剪辑
I
={I
t−S
Max
+1
,
...
, 我
...
I
t
+
S
Max
−
1
}
9
端部
使用诸如VGG16 [29]或I3D [4]的骨干网络。
10 //空间细化(第二节)3.2)
.
S s
M
100
- 1
渐进式学习从M预定义建议
11
开始
(
p
i
,
l
i
)
i
=1
←
优化(
B
)
0
的情况
。
0
M
0
K×
4
12 //更新建议(等式12)第一章
长方体
B
=
b
i
i
=1
且
bi
∈
R
,它们是稀疏的
.. Σ
M
Σ
从一个粗略的盒子网格中取样,
形成初步提案。我们实验中使用的11个初始提案的示
例如图2所示。然后,这些初步建议将逐步更新,以更
好地对行动进行分类和定位。 在每个
13
B
s
←更新
14
的端
S s
i i
i
=1
在步骤s中,我们通过依次执行以下过程来更新建议:
•
扩展:提议在时间上扩展到广告剪辑以包括较长范
围的时间上下文,并且时间扩展 适应于动作的移
动,如第3.3节中所描述的。
•
细化:扩展的建议被转发到空间细化,空间细化输
出分类和回归结果,如第3.2节所示。
•
更新:使用简单的贪婪算法更新所有建议,即,每
个建议被具有最高分类分数的回归输出替换:
S
.
s
s
获取不同类型的信息。为了准确的行动
分类,它需要在空间和时间上的上下文特征,而对于
鲁棒的定位回归,它需要在帧级别上更精确的空间线
索。因此,我们的双分支网络由一个
全局分支和一个
局部分支组成,全局分支
对整个输入序列执行时空建
模以进行动作分类,
局部分支
在每一帧执行边界框回
归。
给定当前步骤的帧级卷积特征和tubelet建议,我们
首先通过ROI池化提取区域特征[8]。 然后我们 将区
域特征带到全局分支进行时空建模,生成全局特征。
每一个全局特征都对一个整体的上下文信息进行
b
i
=
l
i
(
c
)
,
c
=
arg max
p
i
(
c
)
,
(
1)
C
tubelet,并进一步用于预测分类,
把
p
s
。 此外,全局特征与
其中c是一个动作类,
ps
∈ R
(
C
+1
)
是第i个建议在C
个
动
作类加上背景上的概率分布,
ls
∈
R
K
×
4
×
C
表示其参数化
坐标(用于计算等式中的局部化损失)3)在
.
每个帧用于每个类别,并且
=
指示解码
PA
。
光栅坐标 我们总结了我们
算法1中的检测算法。
3.2.
空间精度
在每个步骤s,空间细化解决了涉及动作分类和定位
回归的多任务学习问题因此,我们设计了两个-
我
在每个帧处的相应区域特征以形成
局部特征,其用于生成类特定的回归输出
LS
。我们的
局部特征不仅捕获了tubelet的时空背景,而且还提取
了每帧的局部细节。通过联合训练这两个分支,网络
学习了两个独立的特征,这两个特征具有信息性,并
且能够适应自己的任务。
训练损失。我们强制执行多任务损失,以联合训练
动作分类和tubelet回归。设P
s
表示步骤s中选定的阳性
样本集,N
s
表示
步骤s中的阴性样本集(采样策略见第
3.4节)。我们将训练损失L
s
定义为:
分支体系结构,它为这两个任务学习单独的特性,如
图3所示。我们的动机是
L
s
=
ΣΣ
L
cls
(
p
s
,
u
i
)+λ
L
loc
(
l
s
(
u
i
)
,
v
i
)
,
(
2
)
这两项任务的目标有很大的不同,
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
224 浏览量
186 浏览量
2021-03-10 上传
2023-05-16 上传
119 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
