远程监控下3D凝视估计:利用眼头身协同的精确方法
PDF格式 | 968KB |
更新于2025-01-16
| 127 浏览量 | 举报
"基于眼-头-身时间坐标的3D凝视估计是一项新颖的研究,旨在解决在远程监控视频中精确追踪人的视线方向的问题。传统的凝视估计方法往往依赖于眼睛的清晰特写图像,但在远距离、遮挡和低分辨率的情况下,这种方法效果受限。我们的研究团队,由京都大学研究生院情报学研究科PRESTO的野中相马等人主导,提出了一个创新性的解决方案。
他们将视线估计转化为贝叶斯预测,利用人类在看东西时目光、头部和身体之间自然的协调性,不仅考虑眼睛的运动,还结合头部和身体的运动轨迹来推断3D凝视方向。这种方法设计了专门的神经网络模型,分别处理头部和身体方向的似然性,以及与注视方向相关的条件先验,最终通过级联输出获得更为准确的3D估计。
为了支持这项研究,研究人员开发了一个全新的动态3D凝视估计监控视频数据集,该数据集包含了在五个不同室内和室外场景中录制的视频,所有视频都经过3D凝视方向的标注。通过在该数据集以及其他数据集上的实验,结果证实了新方法的有效性和准确性,即使在摄像机无法捕捉到面部的情况下,也能从典型监控距离精确估计出注视方向。
传统上,从远处的监控图像进行凝视估计被视为挑战,因为许多方法只能处理近距离或正对镜头的情况。然而,该研究的突破性工作证明了可以从几米到十几米的监视视角进行有效的凝视估计,甚至当人背对摄像头时,也能够判断他们的注视方向。这为实时监控中的行为理解和分析提供了强大的工具,例如对老年人日常活动的监测,有助于洞察个体的心理状态和需求,而不只是表面行为。"
这项研究不仅提升了动态3D凝视估计的准确性和适用范围,而且推动了计算机视觉领域在实际监控场景中的应用,具有显著的实际价值和社会意义。
2192
动态3D凝视:
基于眼
-
头
-
身时间坐标的深度注视估计
野中相马<$信原翔平<$西野
高
<$
†
京都大学研究生院情报学研究科
PRESTO
https://vision.ist.i.kyoto-u.ac.jp/
摘要
我们介绍了一种新的方法和数据集的
3D
凝视估计的
自由移动的人从远处,典型的,
cally
在监视视图。在
这种情况下,由于遮挡和缺乏分辨率,眼睛无法清楚
地看到。现有的注视估计方法遭受或退回到具有头部
姿势的近似注视,因为它们主要依赖于眼睛的清晰的
特写视图。我们的主要想法是利用人们内在的目光、
头部和身体的协调性。我们的方法将视线估计公式化
为贝叶斯预测,给出头部和身体方向的时间估计,可
以从远处可靠地估计。我们建模的头部和身体的方向
似然性和条件先验的注视方向上的那些与单独的神经
网络,然后级联输出的
3D
注视方向。我们引入了一个
广泛的新数据集,该数据集由在
5
个室内和室外场景中
捕获的
3D
凝视方向注释的监控视频组成。在此数据集
和其他数据集上的实验结果验证了我们方法的准确
性,并证明即使在摄像机看不到人的面部时,也可以
从典型的监视距离准确地估计注视
1.
介绍
如果我们可以从远处连续跟踪一个人的视线方向,
例如,将摄像机固定在房间和街角?如果我们能做到
这一点,视线估计的实用性将大大提高,其效用将大
大扩展。它将允许我们使用已经安装的监控摄像头或
那些监视老人跟踪一个人的动态变化的目光,这将让
我们更深入地了解这个人的内部状态,而不仅仅是她
的
尽管凝视估计研究取得了很大进展,特别是通过利
用深度神经网络[9,16,32,34,35],但大多数基于
外观的方法无法应用于从远处拍摄的这是因为他们在
她-
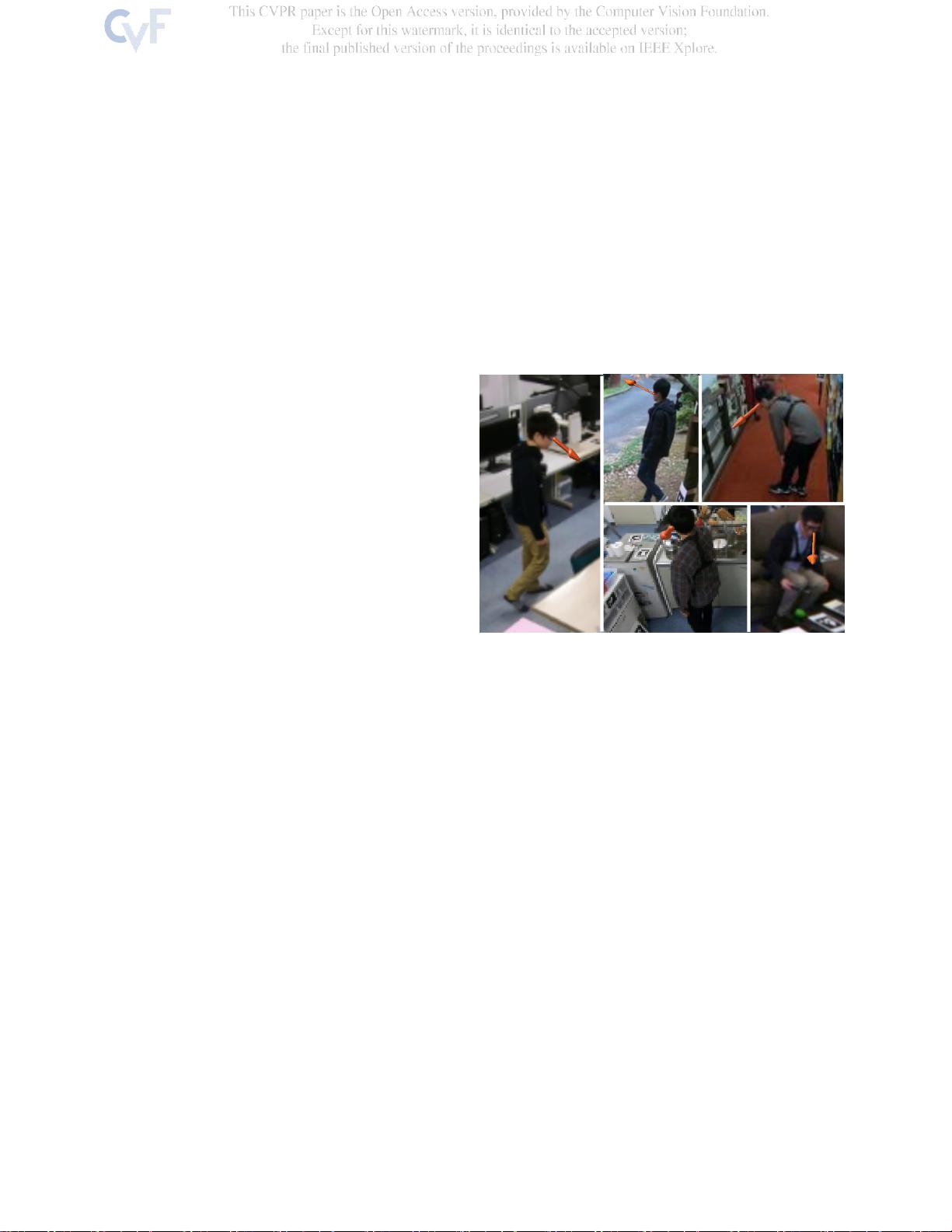
图
1.
我们介绍了一种新的方法,用于估计从远处捕获的视频
中的人(橙色箭头)的凝视我们的方法不依赖于眼睛的外
观,即使当人背对相机时,也可以判断注视方向我们引入了
一个新的数据集,在野外与地面实况注释的凝视估计请注
意,标记、眼动仪和身体佩戴式摄像机仅用于地面实况注
释。
需要眼睛的清晰和近距离观察。例如,大多数领先的
方法假设人足够接近相机(范围从10 cm到1 m),或
者它们仅适用于人的正面视图(高达90°)。我们的目
标是典型的监视和监控视图,范围从几米到10米。
证明从监视图像进行凝视估计的少数方法近似于具
有头部或身体取向的凝视,这对于大多数下游任务来
说太粗糙[25,26]。最 近的一种方法[6]确实通过从
OpenPose检测到的人体关键点回归来估计来自监控摄
像机的然而,该方法仅估计2D中的注视(
即
,在图像
平面中
下载后可阅读完整内容,剩余9页未读,立即下载
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 自动生成CAD模型文件的测试流程
- 掌握JavaScript中的while循环语句
- 宜科高分辨率编码器产品手册解析
- 探索3CDaemon:FTP与TFTP的高效传输解决方案
- 高效文件对比系统:快速定位文件差异
- JavaScript密码生成器的设计与实现
- 比特彗星1.45稳定版发布:低资源占用的BT下载工具
- OpenGL光源与材质实现教程
- Tablesorter 2.0:增强表格用户体验的分页与内容筛选插件
- 设计开发者的色值图谱指南
- UYA-Grupo_8研讨会:在DCU上的培训
- 新唐NUC100芯片下载程序源代码发布
- 厂家惠新版QQ空间访客提取器v1.5发布:轻松获取访客数据
- 《Windows核心编程(第五版)》配套源码解析
- RAIDReconstructor:阵列重组与数据恢复专家
- Amargos项目网站构建与开发指南
