动态路由选择:适应尺度变化的网络结构及其应用
PDF格式 | 1.21MB |
更新于2025-01-16
| 138 浏览量 | 举报
"该文章探讨了动态路由选择在网络结构中的应用,特别是在处理语义分割任务中的规模变化问题。动态路由是一种新的方法,它能够根据输入图像的规模自适应地调整网络路径,以产生数据依赖的路线。文章提出了可微分的软条件门机制,用于控制路由过程中的计算成本,并通过预算约束实现端到端的优化。网络层的路由空间被放宽,允许多路径传播和跳跃连接,从而增加网络容量。作者通过与静态架构的比较和在Cityscapes、PASCAL VOC2012数据集上的实验,验证了动态框架在处理规模差异和分布方差方面的优势。"
在计算机视觉的语义分割任务中,输入图像的大小差异是一个关键挑战。传统的网络结构如FCN、U-Net和DeepLab系列虽然在静态架构中尝试解决这个问题,但它们可能无法很好地适应所有规模的输入。文章中提出的动态路由方法则引入了一种概念上的创新,它能够根据输入图像的尺度动态调整网络的前向路径。例如,对于大型实例,网络可能会忽略低级特征,而对于小型实例,它可能会利用低级细节和更高分辨率的信息。这种灵活性使得网络能够更好地处理混合尺度的输入。
为了实现动态路由,文章提出了软条件门机制,这是一种可微分的门控函数,可以控制不同路径的权重,同时通过预算约束降低计算成本。这种机制允许网络在保持性能的同时,减少不必要的计算。此外,通过放宽网络层的路由空间,网络能够支持多路径传播和跳跃连接,这增加了网络的表达能力和处理复杂场景的能力。
实验部分,作者在Cityscapes和PASCAL VOC2012数据集上对动态路由框架进行了大量实验,结果表明,动态框架在处理输入规模变化和分布方差方面具有显著优势。这些实验不仅验证了动态路由的有效性,还提供了与现有静态网络架构的对比,进一步证明了动态路由在语义分割任务中的优越性能。
这篇论文提出了一种新颖的动态路由策略,解决了语义分割任务中尺度变化的问题,通过可微分的软条件门和多路径传播,提高了网络对不同规模输入的适应性。这种方法为未来网络结构的设计和优化提供了新的思路。
8555
S
S
S
S
S
S
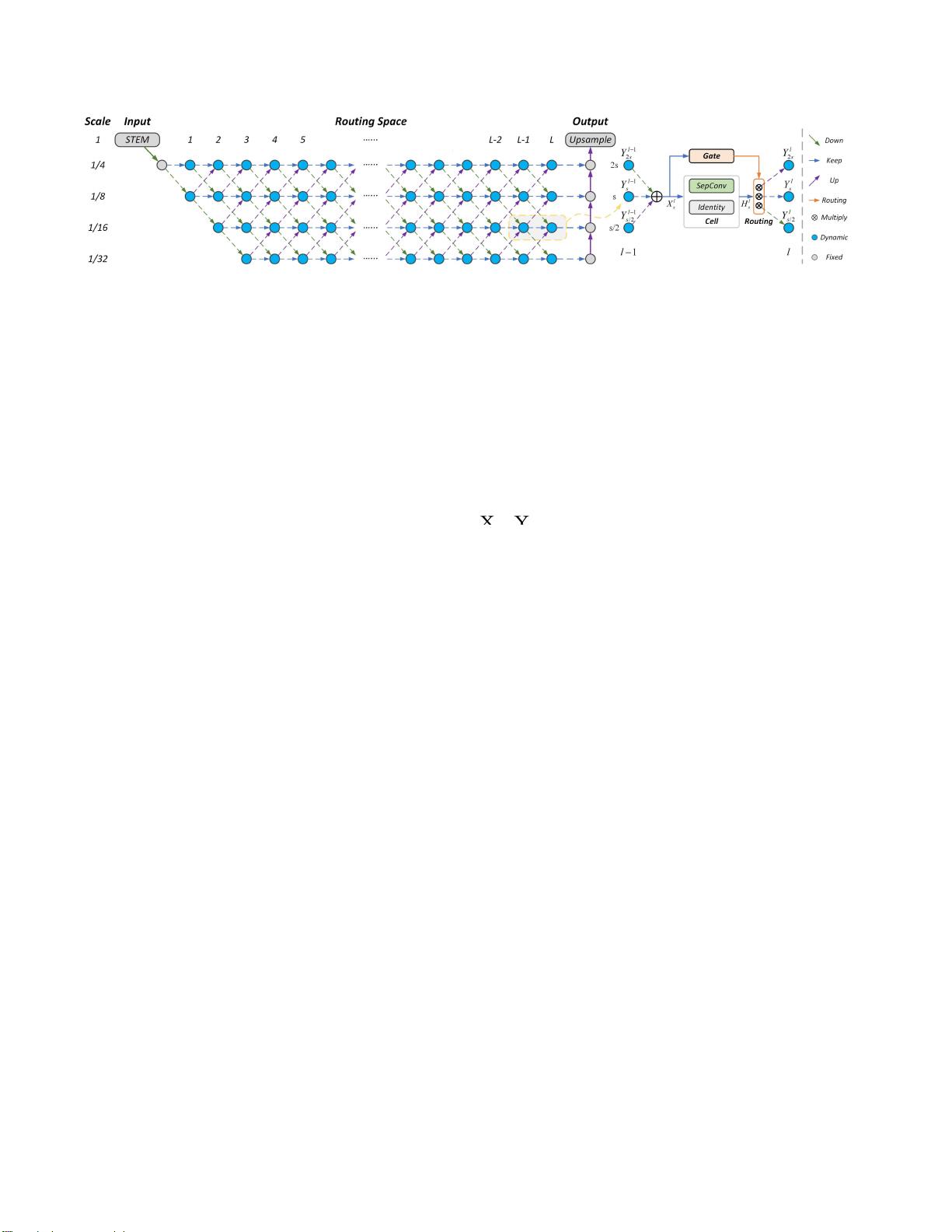
图
2.
提出了语义分割的
动态路由
框架。
左:
具有层
L
和最大下采样率
32
的布线空间。开始
STEM
和最终
上采样
块是固定的,以保
持稳定性。虚线表示动态路由的备选路径。
右图:
单元级别的动态路由过程。给定来自前一层的求和输入,我们首先使用
软条
件门
生成激活权重。具有大于零的对应权重的路径被标记为激活的,这将被选择用于特征变换。有关网络的更多详细信息,请
参见第
2
节。三点四分。最好用彩色观看。
3.
学习动态路由
与静态网络结构相比,动态路由具有网络容量大、
性能高的优点。在本节中,我们首先介绍设计的布线
空间。然后详细阐述了动态路由框架和约束机制。体
系结构的细节将在本节的末尾给出。
3.2.
路由过程
给定多个独立节点的布线空间,我们采用一个基本
单元
和一个相应
的门
在每个节点内聚合多尺度特征和
选择布线路径,分别。这一过程简要说明图。二、更
具体地说,我们首先聚合三个具有不同空间大小(即
s/
2
,s和
2
s)的输入,
层
l
−1,分别表示为
Y
l
−
1
、
Y
l
−
1
和
Y
l
−
1
。
s/2
s
2s
因此,第l层的输入
Xl
可以公式化为:
3.1.路由空间
S
X
l
= Y
l−1
l
l−1
s
/
2
+
Y
s
+
Y
2
s
。然后,聚合输入将为
为了释放动态路由的潜力,我们提供了
在具有某些先验约束的情况下,
例如,
单元之间的上
采样或下采样步幅,如图所示。二、 具体地说,
用于Cell和Gate内部的特征转换。
3.2.1
电池运行
根据网络设计的一般做法,
输入
X
l
∈
R
B
×
C
×
W
×
H
,我们采用了广泛使用
的
网络的开始是固定的3层
这将分辨率降低到1/4比例。之后,一个空间
堆叠的单独卷积以及每个单元中的恒等映射[46,23,
22],没有铃声和口哨声。
具有L层的设计用于动态路由,称为
路由,
特别地,隐藏状态
H1
∈
R
B
×
C
×
W
×
H
可以是
空间
。 在路由空间中,
相邻小区被限制为2个,这在基于ResNet的方法中被广
泛采用。因此,最小比例被设置为1/32。 由于这些限
制,
表示为
Σ
Hl
=
S
O
i
∈O
O
i
(X
l
)
(1)
每层最多为4层。每个候选图像的尺度变换有3条路
径,即上采样、保持分辨率和下采样。在每个候选者
内部,基本
单元
被设计用于特征聚合,而基本
门
被提
出用于路径选择,如图所示。二、逐层上采样模块固
定在网络的末端以生成预测。有关动态路由过程的更
多详细信息,请参见3.2.与Auto-DeepLab [22]不同,其
中在推理阶段仅选择每个节点中的一个特定路径,我
们进一步放松路由空间以支持每个候选中
的多路径
路
由和
跳过连接
。有了更通用的空间,许多流行的架构
可以被公式化为特殊情况,如图所示。3.第三章。进
一步的定量比较在Sec.4.3恶魔-
其中
O
表示操作集,包括SepConv3×3
和身份映射。在这里,每个细胞内的操作
用于基本特征聚合。然后根据激活因子α
l
将
生成的特征
图
Hl
变换到 不同的尺 度。下 一节将详 细阐述这 一过
程。此外,不同的细胞成分进行了比较。4.4.1.
3.2.2
软条件门
每条路径的
路由概率
由
门
函数生成,如图1右图所示。
二、更详细地,我们在门中采用轻加权卷积操作来学
习
数据依赖
向量
Gl
。
展示了动态路由的优越性。
G
l
=F(ω
l
,
G(σ(N(F(w
l
,
X
l
))
+
β
l
(
二
)
s s
,
2
s
,
1
s s
剩余11页未读,继续阅读
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
