3FabRec:利用无监督与有监督训练提升小样本人脸识别对齐效率
124 浏览量
更新于2025-01-16
收藏 12.81MB PDF 举报
3FabRec是一种创新的快速少样本人脸对齐方法,旨在解决当前面部标记检测中对大量标注数据依赖的问题。该研究由Björn Browatzki和Christian Wallraven在韩国高丽大学的人工智能系进行,他们提出了一种半监督学习策略,利用对抗自编码器和生成式模型来提取和利用未标注的面部数据中的隐性知识。
在第一阶段,研究人员进行无监督训练,构建了一个对抗自编码器,它能在低维潜在空间中高效地重构面部。这个阶段的目标是学习面部数据的内在结构,而无需精确的地标标注。通过对抗性训练,模型能够抵御噪声和模式干扰,从而提高模型的泛化能力。
在第二阶段,有监督学习介入,他们将解码器的输出重新定位为颜色图像生成和地标热图的预测。这个过程通过插入一个传输层完成,该层的引入仅增加了少量参数,显著降低了模型的复杂度,同时也确保了模型在有限的样本(如10张图像)上仍能保持良好的性能。这种方法的优点在于它能够在保持准确性的同时,显著降低过拟合的风险,因为模型主要依赖于大规模未标注数据,而非过度依赖特定数据集。
3FabRec的优势体现在多个基准测试上,它的定位精度已经达到了最先进的水平,尤其是在处理遮挡、姿态变化、光照不均等复杂情况时,能够提供稳定的地标定位。此外,由于其高效的推理速度,模型在GPU上可以达到数百帧每秒(FPS),这使得它在实时面部处理应用中具有很高的实用性。
3FabRec代表了在人脸识别领域的一个突破,它挑战了传统监督学习对大量标注数据的依赖,通过巧妙的架构设计和半监督策略,实现了在小样本条件下仍能保持高性能和鲁棒性的目标,这对于资源有限的场景具有重要意义。
c(a, b) =
2σ
a
σ
a
+ c
σ
2
a
+ σ
2
b
+ c
, s(a, b) =
σ
ab
+ c/2
σ
a
σ
b
+ c/2
(1)
6112
0
未标记的图像
0
ResNet
块
0
倒置Res
Net块
0
交错传输层
0
阶段1:通过E和G进行反向传播
阶段2:通过ITLs进行反向传播阶段2
FT:通过E和ITLs进行反向传播
0
标记的图像
0
重建
0
预测的热图
0
EG
0
z
0
真实热图
0
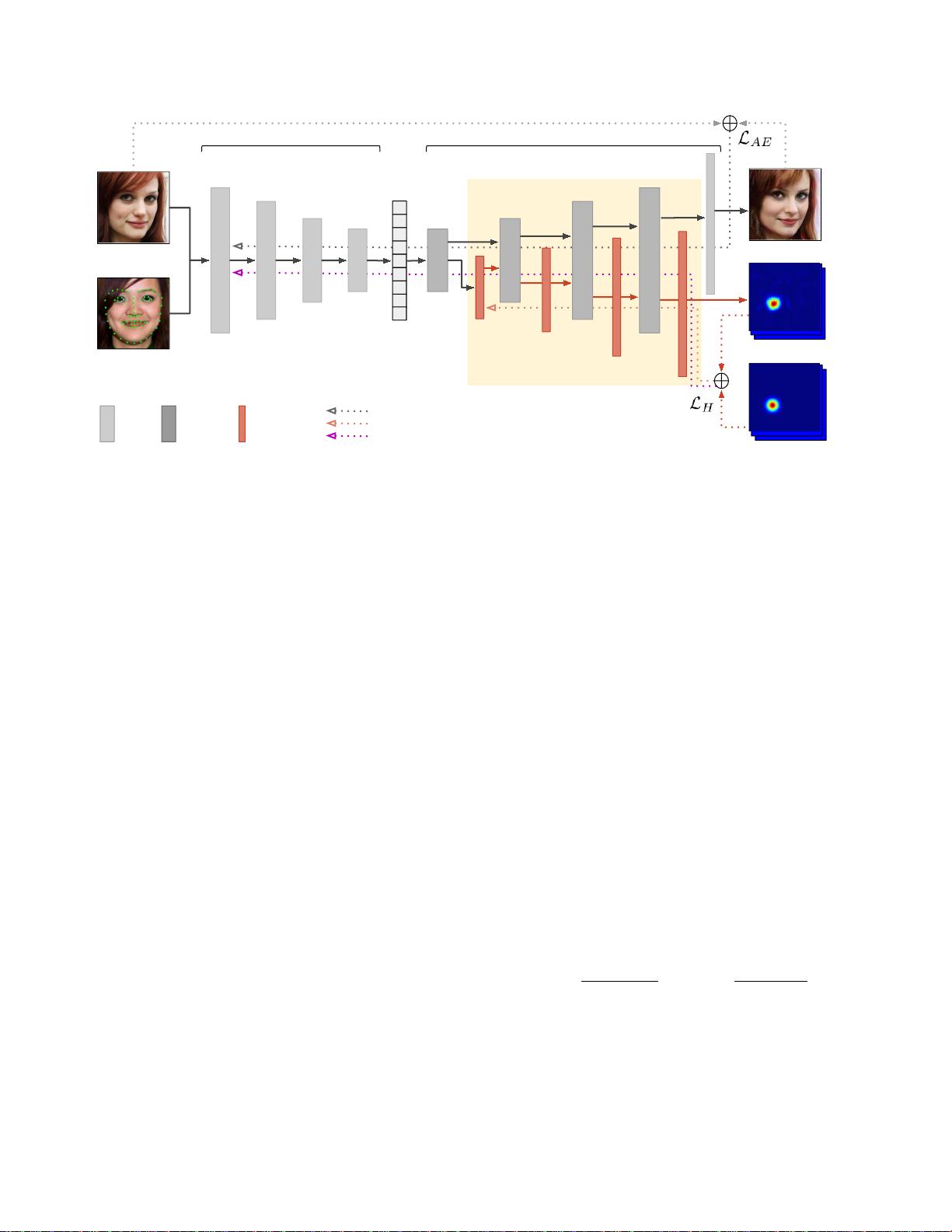
图2:3FabRec流程概述,包括自动编码器的架构以及无监督、监督和微调阶段的训练路径(详见文本)。
0
3.方法
0
3.1.我们的方法
0
上述大多数半监督方法在测试时使用与数据增强相同的数据
集。我们的方法(参见图1、2)从一个无监督方法开始,我
们利用大量的人脸数据集中包含的关于人脸形状的隐式知识
(例如用于人脸识别的数据集[6])。这些知识被捕获在自动
编码器框架的低维潜在空间中。重要的是,自动编码器还具
有生成能力,即在训练过程中,它的任务是从相应的潜在向
量中重建人脸。这一步是因为下面的监督阶段实现了一个混
合重建流水线,它使用生成器和交错的转移层来重建人脸以
及概率性地生成地标热图。因此,潜在向量空间的变化将映
射到在标记数据集上训练的地标位置。鉴于第一阶段的无监
督阶段已经捕捉到了关于面部外貌和面部形状的知识,这些
信息将在第二阶段迅速显性化,从而实现跨多个数据集的泛
化,并实现低样本和少样本训练。
0
3.2.无监督人脸表示
0
无监督训练步骤遵循[4]的框架,其中通过四个损失函数平衡
忠实的图像重建与嵌入的普适性和平滑性来训练对抗自动编
码器。
0
生成新面孔所需的空间。重建损失Lrec通过基于像素的L
1误差惩罚重建错误。编码特征损失Lenc
[19]确保创建一个平滑连续的潜在空间。对抗特征损失L
adv推动编码器E和生成器G
产生高保真度的重建,因为仅使用图像重建损失训练生成模
型通常会导致模糊图像。由于我们方法中预测的地标位置直
接来自重建的面部元素的位置,我们在训练自动编码器时主
要关注准确重建这些特征。因此,我们通过用新的结构图像
损失Lcs替换[4]中使用的生成图像损失Lgen
,在一定程度上牺牲了生成能力以换取重建准确性。
0
结构图像损失:为了惩罚与输入图像不良对齐的重建,我们
添加了基于SSIM
[48]图像相似度度量的结构图像损失,该度量衡量两个图像
窗口a和b之间的对比度c(a,b)和相关性s(a,b):
0
值σa和σb表示窗口a和b的强度方差,σab
表示它们的协方差。常数c
增加了对小分母的稳定性。对于8位通道的图像,将其设置
为c=2550.01。计算在图像上的每个k×k窗口上运行:
剩余10页未读,继续阅读
2021-09-23 上传
1294 浏览量
124 浏览量
111 浏览量
2024-11-03 上传
2023-04-01 上传
2023-04-27 上传
213 浏览量
2023-06-09 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 支付宝订单监控免签工具:实时监控与信息通知
- 一键永久删除QQ空间说说的绿色软件
- Appleseeds训练营第4周JavaScript练习
- 免费HTML转CHM工具:将网页文档化简成章
- 奇热剧集站SEO优化模板下载
- Python xlrd库:实用指南与Excel文件读取
- Genegraph:通过GraphQL API使用Apache Jena展示RDF基因数据
- CRRedist2008与CRRedist2005压缩包文件对比分析
- SDB交流伺服驱动系统选型指南与性能解析
- Android平台简易PDF阅读器的实现与应用
- Mybatis实现数据库物理分页的插件源码解析
- Docker Swarm实例解析与操作指南
- iOS平台GTMBase64文件的使用及解密
- 实现jQuery自定义右键菜单的代码示例
- PDF处理必备:掌握pdfbox与fontbox jar包
- Java推箱子游戏完整源代码分享
