图像驱动的液体表面重建技术
PDF格式 | 2.43MB |
更新于2025-01-16
| 124 浏览量 | 举报
"基于图像的液体表面检测技术旨在解决从图像数据中重建液体表面的挑战。这种方法由George W. Orosco和Michael C. Frichter在加州大学圣迭戈分校提出,它专注于处理因折射率、不透明度和环境反射变化导致的困难,这些问题在传统的刚性和变形表面重建中并未遇到。研究中提出了一种新的优化问题,通过最小化渲染表面与表面检测之间的误差并满足液体约束来实现液体重建。他们采用粒子系统来表示液体,并提出一种动态预测种子重建优化策略,从之前的时间步长进行重建。该方法无需训练数据,已经在模拟数据和两个新的液体数据集上进行了测试,并且开源,以便于更多的研究者参与此领域的探索。"
在这篇工作中,作者首先强调了对3D几何理解的重要性,特别是在使用相机作为传感器时。传统的表面重建技术已广泛应用于静态和动态环境,包括刚性和可变形物体,但液体的重建是一个未被充分探索的领域。液体的特性,如流动性、不规则形状和复杂的动力学行为,使得重建更为复杂。
作者提出的新方法主要包含两个核心部分:一是液体表面检测优化问题,通过比较粒子渲染的表面与实际检测到的表面,找到最佳匹配,从而实现液体重建;二是动态预测种子重建,利用历史时间步的信息预测当前状态,提高了重建的准确性和效率。这种方法的优势在于它不依赖于特定的液体属性或预先训练的数据,使其具有广泛的适用性。
实验部分,研究人员不仅在模拟数据上验证了算法的有效性,还使用了实际的内窥镜相机和生活场景中的液体(如巧克力牛奶)进行测试,展示了该方法在真实世界环境中的表现。开源代码的提供鼓励了更多研究者在此基础上进行深入研究和改进,为未来的液体重建技术提供了基础平台。
这篇工作的贡献在于提出了一种基于图像的液体重建技术,它克服了液体特性的挑战,无需特定的先验知识,具有良好的泛化能力,且已经在模拟和真实数据上得到了验证。这一进展对于推动液体重建领域的发展,尤其是在机器人操作、医疗跟踪等应用中具有重要意义。
13813
2
·
·
·
·
X
p
=
C
(
p
)
w
SD
F
(
p
+
d
k
)
(
3
)
c k
←
±±
±
不
我
不
不
不
←
碰撞约束
密度约束
图像损失
算法一:输入:先前的液体粒子位置和
速度
p
t-
1
,
v
t-
1
,图像
I
t
输出:更新的液体粒子位置和
速度p
t
,v
t
//粒子预测
1p
t
p
t-
1
+
v
t-
1
t
+
1
g
t
2
2 对于n
o
次迭代
,
对于
n
,
j
次迭代
,
//应用位置约束
4
对于
n
c
次迭代
,
5 p
c
←
solveCollision(p
t
)
6
p
t
←
p
t
+
p
c
10
.solveDensity
(
p
t
)
8p
t
←
p
t
+ p
//最小化图像丢失
对于
n
i
次迭代
,
10
I
(
p
t
)
←
re
n
d
e
rS
urf
ac
e
(
p
t
)
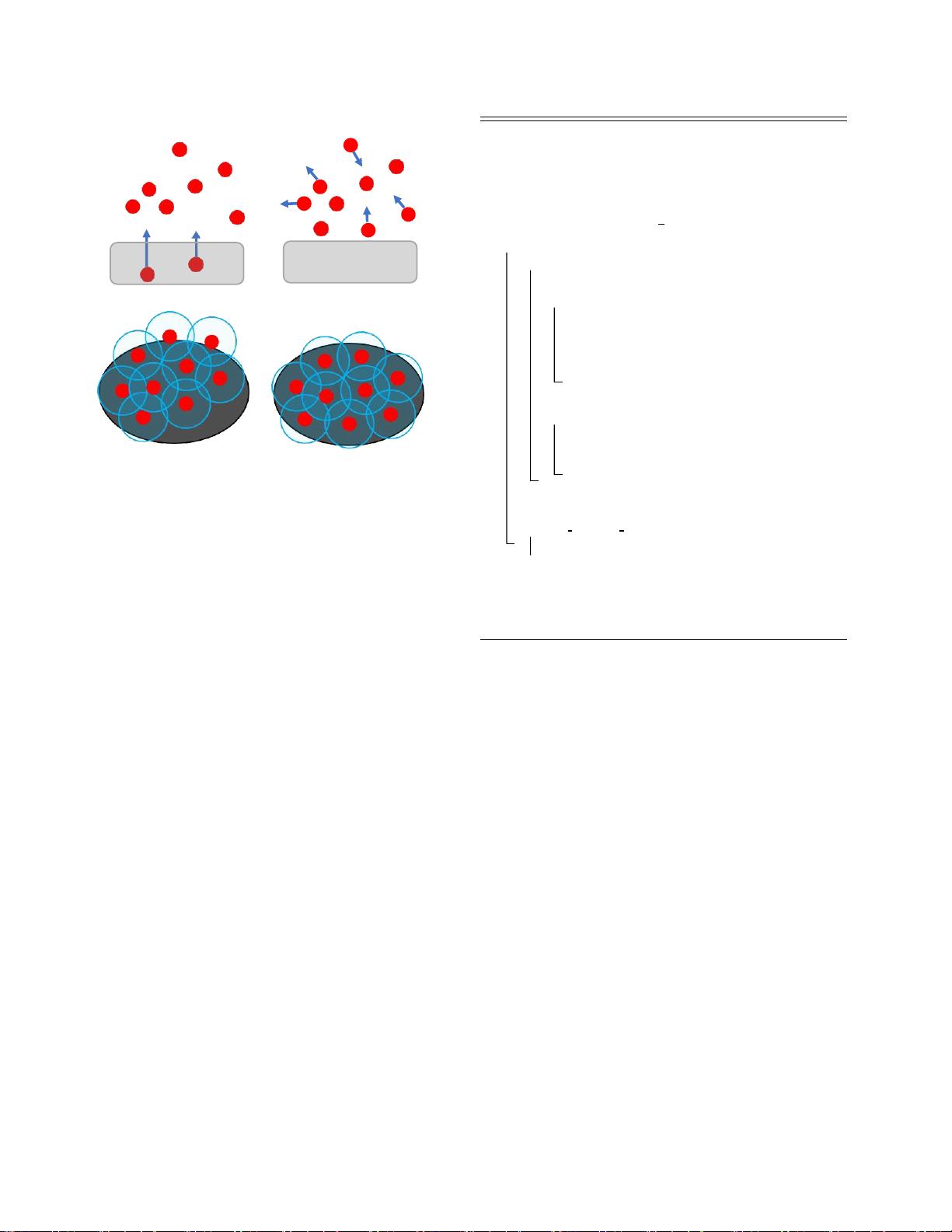
图2.一个可视化的解决方案(1),按照左上角,左上角,
11
p←p
+
@
L
I
,
I
(
p
)
/
@
p
浅灰色),密度约束通过保持恒定的密度来确保液体的不可
压缩性,并且最终使检测表面(以黑色绘制)和表面绘制
(以半透明蓝色绘制)之间的图像损失最小化。
解释了在粒子位置上的
face
、faceI
()
及其分量
,以
使损失最小化。在投影梯度下降方案中应用约束求
解器和表面损失梯度来求解(
1
),如算法
1
的第
4
至
11
行所示。第三,找到粒子的数量,
N
,以重建液
体和添加或删除粒子的策略进行了详细说明。最
后,从时间步长
t
到
t
+1
的颗粒的预测被定义为从检
测到的液体的视频
I1
,
. ......
、
IT
3.1.液体粒子
在优化(1)时用于重构液体的两个位置约束是碰
撞和密度。碰撞约束确保表示重构液体的粒子中没有
一假设C
c
()是粒子的碰撞约束,它表示为:
其中
,
relu
()是整流线性单位函数,
并且
SDF()是场景的带符号距离函数。当它为0时,满足
碰撞约束,
通过使所有粒子脱离碰撞(即,粒子位置处不再有负
SDF值)。
为了使粒子脱离碰撞并满足碰撞约束,采用有限差
分法近似计算了一个
//调整粒子数
12 如果
局部极小条件
,则
13 p
t
←
duplicateOrRemoveP article(p
t
)
//更新粒子速度
14v
t
←
(p
t
-
p
t-
1
)/t
15v
t
dampVelocityAndApplyViscocity(p
t
,v
t
)
16
return
p
t
,
v
t
梯度(2),并且颗粒沿着梯度台阶移动。这是为粒子
p
i
计算的,如下:
我我我
C
k2
K
其中
K
是有限样本方向的 集合(例如 ,[1,0,0],
[0,1,0],[0,0,1]),
wk
是有限差分权重,d是样
本方向的步长。有限差分权重被最佳地计算[8]并缩
放,使得求和的结果向量被归一化。进行归一化,使
粒子向上移动到当前碰撞深度C
c
(
p
i
),而不是在无
碰撞空间中。碰撞约束被迭代地求解并应用于粒子,
如Al-出租m1中的第5行和第6行所示。
第二个约束,密度,确保液体不可压缩。基于颗粒
的液体表示的密度可以使用与平滑颗粒流体动力学
(SPH)相同的技术来表示[11,24]。SPH模拟计算流
体力学的物理特性,如密度,使用插值技术与核心算
子围绕粒子的位置。
右侧和底部,粒子位置用红色绘制。碰撞约束将粒子推离碰
撞(绘制
不
剩余11页未读,继续阅读
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Saber仿真下的简化Buck环路分析与TDsa扫频
- Spring框架下使用FreeMarker发邮件实例解析
- Cocos2d捕鱼达人路线编辑器开发指南
- 深入解析CSS Flex布局与特性的应用
- 小学生加减法题库自动生成软件介绍
- JS颜色选择器示例:跨浏览器兼容性
- ios-fingerprinter:自动化匹配iOS配置文件与.p12证书
- 掌握移动Web前端高效开发技术要点
- 解决VS中OpenGL程序缺失GL/glut.h文件问题
- 快速掌握POI技术,轻松编辑Excel文件
- 实用ASCII码转换工具:轻松实现数制转换与查询
- Oracle ODBC补丁解决数据源配置问题
- C#集成连接器的开发与应用
- 电子书制作教程:你的文档整理助手
- OpenStack计费监控:使用collectd插件收集统计信息
- 深入理解SQL Server 2008 Reporting Services
