模板引导的图像抠图:基于渐进细化网络与粗糙模板
157 浏览量
更新于2025-01-16
收藏 2.46MB PDF 举报
"这篇论文提出了一种新的图像抠图方法,称为基于粗糙模板的模板引导抠图(MGMatting),该方法利用渐进细化网络(PRN)来逐步细化不确定区域,尤其适用于无三重图抠图场景。通过在训练过程中引入一系列指导罩扰动,PRN能够适应不同类型如三重图和低质量alpha蒙版的指导输入,扩大了其在各种应用场景中的适用性。此外,论文还提出了一种简单的前景色预测改进,解决了数据集问题。MGMatting在真实和合成基准测试中表现出最先进的性能,并且代码和模型已在GitHub上开源。"
本文主要关注的是图像抠图技术,这是一个基础的计算机视觉任务,旨在预测图像中特定区域的alpha抠图。传统方法通常依赖于trimap作为辅助输入,但trimap的创建对用户来说较为繁琐,限制了其在非交互式应用中的使用。因此,研究开始转向无三重图抠图,即无需trimap的解决方案。
作者提出的方法名为Mask Guided (MG) Matting,它基于渐进细化网络(Progressive Refinement Network,PRN)。PRN的独特之处在于它能自我指导,通过解码过程逐渐细化那些边界模糊或不确定的区域。在训练阶段,通过一系列指导罩的扰动,PRN得以适应不同类型的指导输入,包括未见过的三重图和低质量的alpha蒙版,这使得它能广泛应用于各种图像处理管道。
此外,论文还探讨了前景色预测问题,并提出了一种简洁的改进策略,有效解决了数据集存在的问题。这一改进对于在复杂现实世界图像上推广抠图模型至关重要。通过对真实世界和合成图像基准的评估,MGMatting展示了卓越的性能,证明了其在各种指导输入类型下的有效性。
为了促进研究和应用,MGMatting的代码和模型已公开发布在GitHub上,可供其他研究者和开发者使用和进一步开发。这种方法的贡献在于提供了一种更灵活、更具适应性的图像抠图解决方案,降低了对精确人类标注的依赖,提升了无三重图抠图的准确性和实用性。
1156
L
上采样
元素级
产品
元素
求和
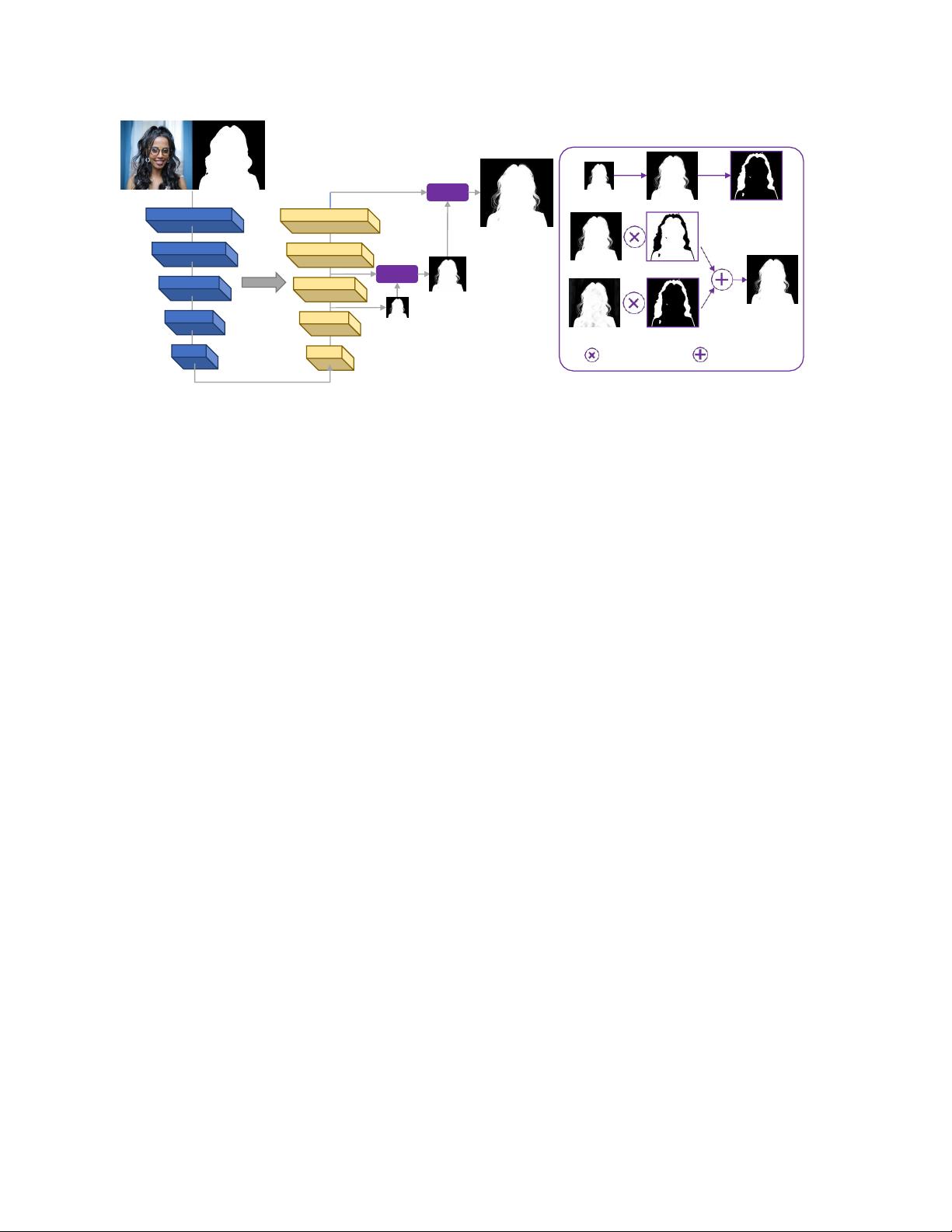
渐进细化模块(PRM)
图2:提议的PRN。该网络在多个分辨率下预测alpha matte,而较低分辨率下的一个提供关于下一次预测中要细化的
不确定区域的指导。
available.我们的模型还可以利用更强的指导来实现更
精细的细节。2)我们的方法还可以预测前景颜色。与
[18]不同,其中前景预测直接从颜色标签中学习,我
们注意到有限的训练数据和不准确的人类标签导致不
期望的结果,特别是在边界区域。相反,我们建议使
用随机AphaBlending来避免标签中的偏差,这不仅引
入了更多样化的训练样本,而且还避免了边界区域中
不准确的颜色标签定位。
3.
MG哑光
图像抠图的问题可以用公式表示为:
I
=
α
F
+
(1−
α
)
B
,
α
∈[
0
,
1
]
,
(
1
)
其中,
I
、
F
、
B
和α分别指图像颜色、前景色、背景色
和alpha蒙版。因为只有我被观察到,这是一个非常不
适定的问题。为了解决抠图问题,大多数方法都需要
一个三重图输入,它标记了前景区域(
即
:α
=
1
),
背景区(
即
,α
=
0
)和未知部分。在实践中,三重图
输入可能包含各种级别的噪声和错误,使得抠图结果
不一致。
我们放松了三重映射的强假设,提出了一种模板引
导的抠图方法。掩模引导(诸如预测的分割掩模或粗
略的手动选择)仅提供前地面区域的粗略空间先验。
因此,我们的MG抠图方法需要
高层次和低层次特征学习的结合是MG抠图方法设计的
关键。
为此,我们引入了渐进式细化网络(PRN),它提
供了一个由粗到细的自我指导,逐步细化不确定的区
域在解码过程中。在下文中,我们将详细介绍PRN、
训练公式和一些数据增强技术,以增强我们模型的鲁
棒性。
3.1.
渐进式精化网络
PRN的概述如图2所示。我们的PRN的结构遵循流行
的编码器-解码器网络与跳过连接。我们的网络将图像
和粗糙的蒙版作为输入,并输出一个蒙版。在解码过
程中,PRN在每个特征级别都有一个侧抠图输出。具
有深度监督的侧输出已被证明可以改善不同尺度下的
特征学习[40]。然而,与[40]不同的是,我们发现线性
融合侧输出对于抠图问题并不理想(详情请参见表
4)。这是因为更靠近对象边界的图像区域需要较低级
别的特征来描绘前景,而识别内部对象区域需要较高
级别的指导。
为了解决这个问题,我们在每个特征层引入了一
个渐进细化模块(
PRM
)来选择性地融合前一层和
当前层的抠图输出具体来说,对于当前层
l
,我们使
用以下函数从前一层的抠图输出
α
l
−
1
生成自引导掩码
g
l
对输入掩码的更高级语义理解,
从而可以检测前景/背景区域,
f
→
g
(
x
,
y
)
=
.
0
<α时为
1
l
−
1
(x
,
y)
1
,
<
(
二
)
柔软的透明部分坚固耐用。 同时,我们的模型
α
l
−
1
l
0 否则
。
必须捕捉图像的低层次图案,如边缘和纹理,以产生
目标蒙版的精细细节。Coordi-
首先对
α
l
−
1
进行上采样,以匹配当前级别的原始抠图
输出
α
′
的大小
,然后生成
图像
掩模
PRM
跳过-
连接
PRM
剩余10页未读,继续阅读
263 浏览量
948 浏览量
2023-04-15 上传
150 浏览量
221 浏览量
265 浏览量
163 浏览量
2025-01-03 上传
163 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 支付宝订单监控免签工具:实时监控与信息通知
- 一键永久删除QQ空间说说的绿色软件
- Appleseeds训练营第4周JavaScript练习
- 免费HTML转CHM工具:将网页文档化简成章
- 奇热剧集站SEO优化模板下载
- Python xlrd库:实用指南与Excel文件读取
- Genegraph:通过GraphQL API使用Apache Jena展示RDF基因数据
- CRRedist2008与CRRedist2005压缩包文件对比分析
- SDB交流伺服驱动系统选型指南与性能解析
- Android平台简易PDF阅读器的实现与应用
- Mybatis实现数据库物理分页的插件源码解析
- Docker Swarm实例解析与操作指南
- iOS平台GTMBase64文件的使用及解密
- 实现jQuery自定义右键菜单的代码示例
- PDF处理必备:掌握pdfbox与fontbox jar包
- Java推箱子游戏完整源代码分享
