深度跟踪数据集推动RGBD目标跟踪新进展:DeT方法与性能提升
67 浏览量
更新于2025-01-16
收藏 2.3MB PDF 举报
深度跟踪:RGBD目标跟踪的新方法及数据集
随着机器人技术、自动驾驶、智能家居等领域的发展,RGBD(红绿蓝深度)目标跟踪技术变得越来越重要,因为它结合了视觉和深度信息,提高了在复杂环境中物体识别和定位的能力。然而,现有的RGBD跟踪器通常依赖于先进的RGB跟踪器,利用RGB数据进行训练,而深度通道则主要用于处理遮挡和细节问题,因为缺乏大规模的RGBD训练数据。
以往的工作存在数据集规模有限的问题,这限制了深度跟踪器的性能提升和深度线索的有效利用。为了解决这一问题,本研究提出了一项突破——深度跟踪(DepthTrack)数据集。这个新数据集相较于现有最大规模的数据集,拥有显著的增强,包括:
1. 增加的序列数量:DepthTrack包含200个序列,几乎是现有最大数据集的两倍,为深度学习模型提供了丰富的样本。
2. 扩展的场景类型:涵盖40种不同的场景,使得跟踪器能够适应多样化的环境条件。
3. 更多的对象种类:包含90个不同对象,增加了模型的泛化能力。
4. 长序列的平均长度:每个序列平均长度达到1473帧,模拟了更长时序的跟踪挑战。
5. 变形对象的考虑:数据集中有16个可变形对象,测试跟踪器在形状变化情况下的性能。
6. 注释跟踪属性:提供15个关键的跟踪属性标签,有助于评估跟踪质量的多个维度。
为了验证DepthTrack的价值,研究者在该数据集上运行了SotARGB和RGBD跟踪器,并开发了一种新的RGBD跟踪基线——DeT(Depth-based Tracking),它展示了深度信息在大规模训练数据支持下对跟踪性能的提升。DeT的结果表明,深度RGBD跟踪确实可以从一般的训练数据中受益。
这项工作的主要贡献在于创建了一个更具挑战性和代表性的RGBD跟踪数据集,以及提供了一种基准方法,推动了RGBD跟踪技术的进一步发展。研究人员希望,DepthTrack将促进深度感知跟踪算法的研究和创新,并最终提升各种应用中对目标对象的精准定位能力。
代码和数据集可以在<https://github.com/xiaozai/DeT>获取,供学术界和工业界使用,共同推动RGBD目标跟踪技术的进步。
10725
DepthTrack:揭开RGBD跟踪
SongYan
1
,
†
,JinyuYang
2
,
3
,
†
,JaniKa¨ pyla¨
1
,
†
,FengZheng
2
,AlesˇLeonardis
3
,Joni-KristianKa¨ma¨
ra¨ inen
11
坦佩雷大学
2
南方科技大学
3
伯明翰大学
{
song.yan,jani.kapyla,joni.kamarainen
}
@ tuni.fi,outlook.com,
zhengf@sustech.edu.cn,a. cs.bham.ac.uk
摘要
随着
RGBD
传感器在机器人 等 许多应用 领域的普
及,
RGBD
(
RGB + depth
)目标跟踪技术正得到越来
越广泛的应用。然而,最好的
RGBD
跟踪器是最先进
的深度
RGB
跟踪器的扩展。它们使用
RGB
数据进行训
练,深度通道用作遮挡检测等微妙之处的助手。这可
以通过以下事实来解释:不存在足够大的
RGBD
数据
集来
1
)训练
“
深深度跟踪器
”
和
2
)用深度线索对于其
是必不可少的序列来挑战
RGB
跟踪器。这项工作引入
了一个新的
RGBD
跟踪数据集
-
深度跟踪
-
它具有比现有
最大数据集多两倍的序列(
200
)和场景类型(
40
),
以及三倍多的对象(
90
)。此外,序列的平均长度
(
1473
)、可变形对象的数量(
16
)和注释跟踪属性
(15)
增加了。此外,通过在
DepthTrack
上运行
SotA RGB
和
RGBD
跟踪器,我们提出了一个新的
RGBD
跟踪基
线,即
DeT
,这表明深度
RGBD
跟踪确实受益于一般的
训 练 数 据 。 代 码 和 数 据 集 可 在
https://github.com/xiaozai/DeT
上获得。
1.
介绍
通用对象跟踪的目标是在给定其在第一帧中的位置
的情况下定位视频序列中的未知对象。最流行的跟踪
模态是以RGB图像帧作为输入的色觉。此外,视觉对
象跟踪(VOT)的问题可以分为短期跟踪和长期跟
踪,其被不同地评估[13,14]。短期评估方案通过测
量跟踪器的准确性和稳健性来关注跟踪器本身。如果
追踪者失去了目标,就会-
†
同等贡献。
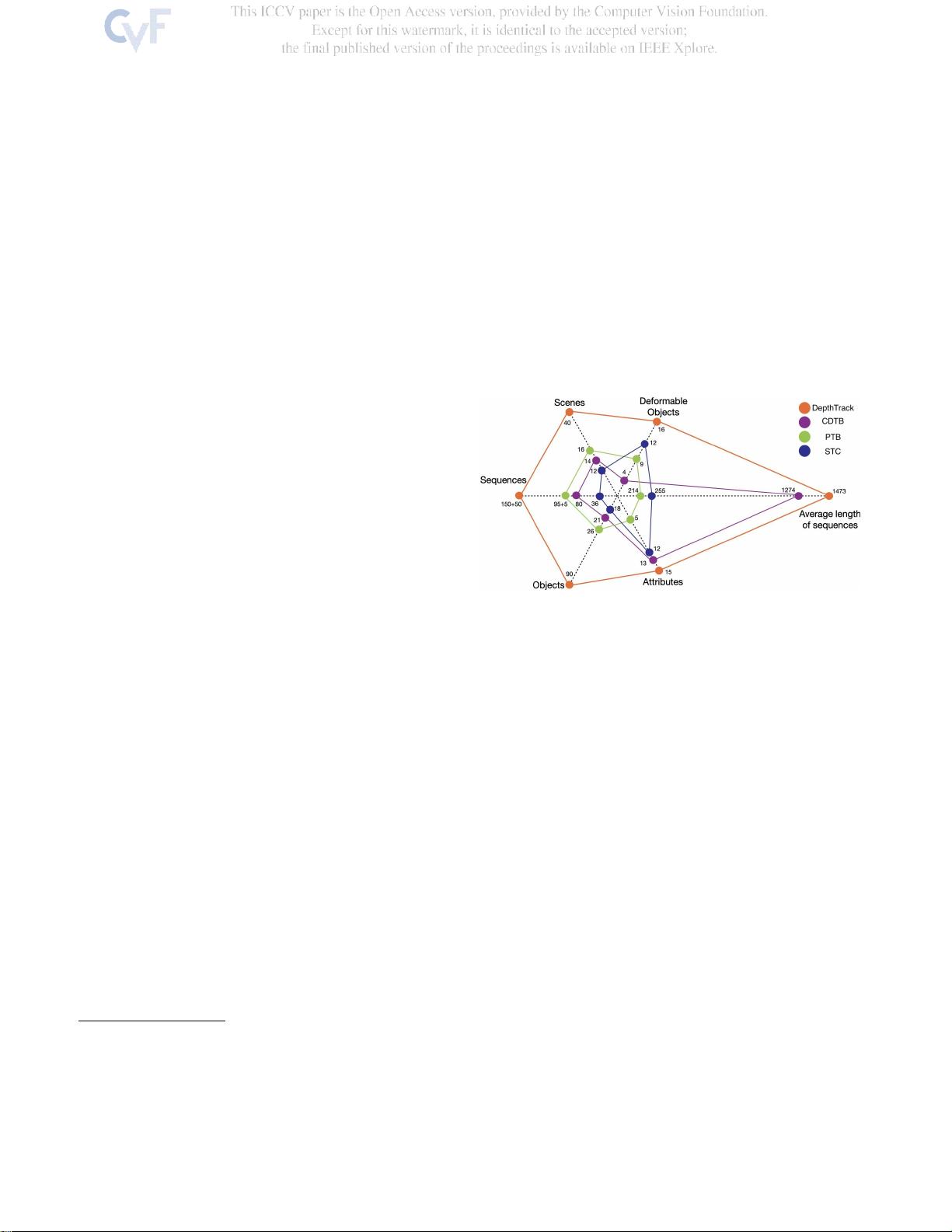
图1:建议的DepthTrack和以前的RGBD跟踪数据集的
属性比较。
影响鲁棒性度量,但是跟踪器被重新初始化,然后评
估继续。在长期(LT)协议中,跟踪器不被重新初始
化,并且因此LT跟踪器需要用于检测目标是否存在以
及在目标不存在操作模式中重新检测的特殊过程两个
最新的VOT挑战[13,14]包括用于RGBT(RGB加热红
外)和RGBD(RGB加深度)对象跟踪的附加轨道。
有趣的是,没有专门针对热特征或深度特征的跟踪
器,但性能最好的RGBT和RGBD跟踪器都使用领先的
深度跟踪器架构MDNet [22]、ATOM [7]和DiMP [3]学
习的RGB特征。附加模态T或D仅用作“助手”,以帮助
各种特殊情况,因此,RGBD和RGBT跟踪的潜在应用
是什么以及T和D通道是否具有其自身的强大特征仍然
不清楚。
在这项工作中,我们专注于RGBD跟踪。RGBD跟
踪已经在一些最近的作品中进行了研究(
例如,
,
[11,12,17]),但这些使用常规RGB和深度特征,
并且劣于VOT 2019和2020 RGBD挑战中基于深度RGB
跟踪器的方法[13,14]。VOT中性能最好的跟踪器
下载后可阅读完整内容,剩余9页未读,立即下载
204 浏览量
点击了解资源详情
3189 浏览量
2021-04-05 上传
2022-08-03 上传
点击了解资源详情
点击了解资源详情

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- A7Demo.appstudio:探索JavaScript应用开发
- 百度地图范围内的标注点技术实现
- Foobar2000绿色汉化版:全面提升音频播放体验
- Rhythm Core .NET库:字符串与集合扩展方法详解
- 深入了解Tomcat源码及其依赖包结构
- 物流节约里程法的文档整理与实践分享
- NUnit3.vsix:快速安装NUnit三件套到VS2017及以上版本
- JQuery核心函数使用速查手册详解
- 多种风格的Select下拉框美化插件及其js代码下载
- Mac用户必备:SmartSVN版本控制工具介绍
- ELTE IK Web编程与Web开发课程内容详解
- QuartusII环境下的Verilog锁相环实现
- 横版过关游戏完整VC源码及资源包
- MVC后台管理框架2021版:源码与代码生成器详解
- 宗成庆主讲的自然语言理解课程PPT解析
- Memcached与Tomcat会话共享与Kryo序列化配置指南
