正交分解网络:提升逐像素二元分类性能
PDF格式 | 1.37MB |
更新于2025-01-16
| 156 浏览量 | 举报
"该文主要探讨了一种基于正交分解的逐像素二元分类方法,旨在提高卷积神经网络在逐像素任务中的性能。通过正交分解单元(ODU),文章提出了解决卷积特征图中相邻像素相关性的问题,以达到去相关的目的。这种方法在理论上能够完美重建二进制掩模,即地面实况。实际应用中,采用了不完全正交分解,以优化计算效率。正交分解网络(ODN)由ODU构建,能学习到去相关和互补的卷积特征,并选择性地融合这些特征。实验结果显示,ODN在骨架检测、边缘检测、显著性检测等逐像素二元分类任务以及一维关键点检测(如地震定位)中,表现出优于现有技术的性能。"
在卷积神经网络(CNN)的传统架构中,权重共享和空间池化操作导致相邻像素间存在语义关联,这在逐像素分类任务中可能削弱模型的表现。为解决这一问题,本文提出了一种新颖的正交分解单元(Orthogonal Decomposition Unit, ODU)。ODU的核心在于将卷积特征映射转换为正交基,从而减少相邻像素间的相关性。理论上,完全正交分解可以生成一个理想的正交基,理论上可以精确重建任何二进制掩模,即实际的输出地面实况。
然而,完全正交分解的计算成本较高,因此在实际应用中,研究者设计了一种不完全正交分解策略,关注于局部补丁的去相关,以在保持重建性能的同时降低计算需求。这种策略被集成到全卷积网络(Fully Convolutional Network, FCN)中,形成正交分解网络(ODN)。ODN能够学习和融合去相关且互补的卷积特征,以逐像素选择性的方式进行决策,提高分类精度。
实验部分,ODN在一系列的逐像素二元分类任务上展示了优越的性能。包括二维图像处理的任务,如骨架检测、边缘检测和显著性检测,以及一维关键点检测任务,例如在地震定位中检测S波到达时间。在这些任务上,ODN都显著超越了现有的技术方法,表明了正交分解在提升逐像素分类任务性能方面的潜力。
此外,骨架检测是计算机视觉中的关键任务,因为它能够提取出对象的紧凑而信息丰富的表示。边缘检测则有助于形成描述性特征并提供空间约束,对于对象分组、语义分割和定位等任务至关重要。显著性检测则对识别图像中最突出和吸引人的区域具有重要意义,广泛应用于多种计算机视觉应用中。ODN的提出为这些任务提供了新的解决方案,并有望推动相关领域的进步。
6064
输入
输出
地面实况
抑制逐像素负片
增强逐像素正片
0
0
00.6
0
0
10.90.
10
0.1 0.6
*
1
0
0
1
00.9
0
0
正交分解
1
0
0
0
卷积重建
基于正交分解网络的逐像素二元分类
常柳
<$
,方晚
<
$,魏柯
<$
,
Zhuowei
Xiao
,Yuan
Yao
,Zhangyong
Zhang
and Qixiang
Ye
†
中国科学院大学,中国
中国科学
§
中国广东省深圳市鹏程实验室
{
liuchang615
,
wanfang13
,
kewei11
,
yaoyuan17
,
zhangxiaosong18
}
@
mails.ucas.ac.cn
xiaozhuowei@mail.iggcas.ac.cn,qxye@ucas.ac.cn
摘要
卷积神经网络(
CNN
)中的权重共享方案和空间池
操作将语义相关性引入到特征图上的相邻像素,因此
降低了其逐像素分类性能。在本文中,我们实现了一
个正交分解单元(
ODU
),它将卷积特征映射转换为
正交基,目标是对卷积特征上的相邻像素进行去相
关。在理论上,完全正交分解产生正交基,可以完美
地重建任何二进制掩码(地面实况)。在实践中,我
们进一步设计了不完全正交分解,重点是去相关的局
部补丁,平衡重建性能和计算成本。用
ODU
实现的全
卷积网络(
FCN
)(被称为正交分解网络(
ODN
))
学习去相关和互补的卷积特征,并以逐像素选择性方
式融合这些特征。在用于二维图像处理的逐像素二进
制分类任务(具体地,骨架检测、边缘检测和显著性
检测)和一维关键点检测(具体地,用于地震定位的
S
波到达时间检测)上,
ODN
以显著的裕度持续地改进
了现有技术。
1.
介绍
逐像素二元分类任务,
例如,
骨架检测、边缘检测
和显著性检测是计算机视觉和模式识别的重要基础。
骨架是最具代表性的视觉属性之一,它描述的对象紧
凑而信息量大
*
通讯作者。
1
0
0
1
10/6
0
0
1
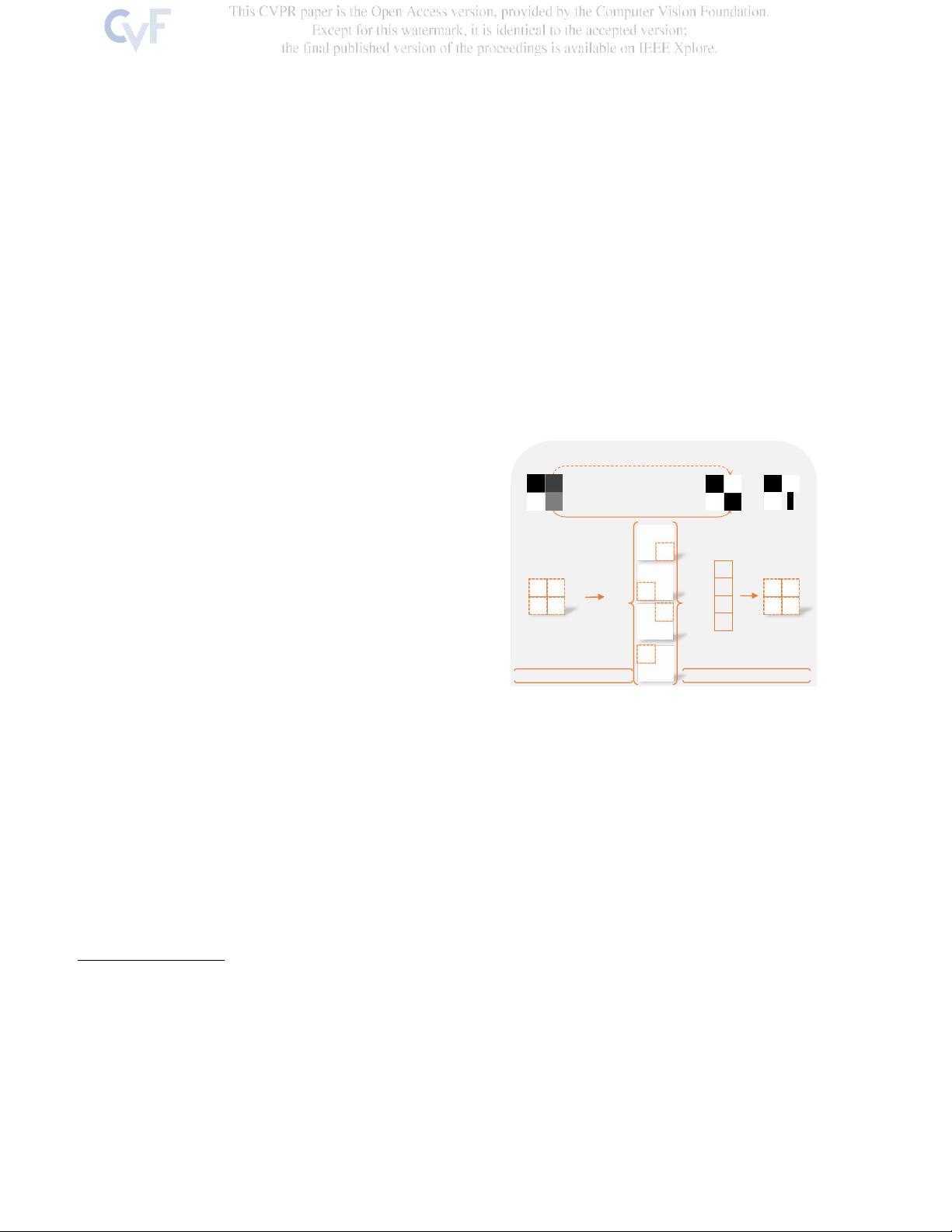
图1:正交分解单元(ODU)将卷积特征映射转换为
正交基,可用于通过卷积重建完美地重建复杂的二进
制掩码(地面实况)。
曲线.这些曲线构成了物体形状的连续分解[25],为物
体表示和识别提供了有价值的线索。边缘可以转换为
描述性特征和空间约束,其强制对象分组[38]、语义
分割[21]和对象定位[13]。显著性表示图像中最明显和
最有吸引力的区域,显著性检测是各种计算机视觉应
用的第一步[8]。
逐像素二进制分类任务的共同目标是在给定彩色输
入图像的情况下预测感兴趣的掩模。在深度学习时
代,全卷积神经网络(FCN)[27]由于其端到端的训练
方式和对图像大小的灵活性,已被广泛应用于最近的
基于FCN的方法,
例如,
整体嵌套边去
下载后可阅读完整内容,剩余9页未读,立即下载
相关推荐


12 浏览量


cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言集成Mandrill API的gem开发
- 开源嵌入式qt软键盘SYSZUXpinyin可移植源代码
- Kinect2.0实现高清面部特征精确对齐技术
- React与GitHub Jobs API整合的就业搜索应用
- MATLAB傅里叶变换函数应用实例分析
- 探索鼠标悬停特效的实现与应用
- 工行捷德U盾64位驱动程序安装指南
- Apache与Tomcat整合集群配置教程
- 成为JavaScript英雄:掌握be-the-hero-master技巧
- 深入实践Java编程珠玑:第13章源代码解析
- Proficy Maintenance Gateway软件:实时维护策略助力业务变革
- HTML5图片上传与编辑控件的实现
- RTDS环境下电网STATCOM模型的应用与分析
- 掌握Matlab下偏微分方程的有限元方法解析
- Aop原理与示例程序解读
- projete大语言项目登陆页面设计与实现
