野外多光照图像数据集:推动计算机视觉的复杂光照理解
39 浏览量
更新于2025-01-16
收藏 2.1MB PDF 举报
野外多光照图像数据集是一个重要的资源,针对计算机视觉领域中光照与材料理解的问题提供了解决方案。当前的数据集普遍存在局限性,主要体现在以下几个方面:
1. 数据集稀缺性:
- 当前的数据集往往局限于实验室环境下的单一样本,如静态拍摄的图片,如[8,20],这些照片不全面地反映了光照变化对物体外观的影响。灯光舞台虽然可以捕捉物体在不同照明下的样子,但其设计限制了灵活性,难以在真实环境中进行大规模捕捉。
2. 实验室与现实差距:
- 真实世界的场景复杂且多样,需要在各种自然和人造光照条件下捕捉。然而,现有的数据集往往不具备这样的代表性,这阻碍了计算机视觉任务如物体识别、检测和分割在实际场景中的性能提升。
3. 多光照需求:
- 计算机视觉任务需要处理多光照条件下的图像,如单图像照明估计、图像重新照明和混合照明白平衡。传统的方法依赖于受控环境下的多个光源,这使得数据难以捕捉并模拟真实世界的光照多样性。
新数据集的特点:
- 我们的野外多光照图像数据集包含超过1000个室内场景,每个场景都有高动态范围和高分辨率图像,捕捉了在25种不同照明条件下的场景。这种大规模和多样性有助于研究人员解决实际场景中的光照问题。
- 为了实现便携和灵活的捕捉,我们采用了间接照明技术,通过安装在伺服系统上的电子闪光灯,当闪光灯旋转时,光线会反弹到墙壁或天花板上,形成场景的主要照明。这样既实现了多光照的捕捉,又保持了设备的紧凑性。
应用场景的验证:
- 通过训练最先进的模型,数据集在三个关键应用中展现了其价值:一是单图像照明估计,即从一张照片中准确估计出照明条件;二是图像重新照明,能够改变输入图像的光照方向;三是混合照明白平衡,即处理不同光照下的合成图像,确保色彩一致性。
总结:
野外多光照图像数据集填补了现有数据集在真实光照场景捕捉和模拟方面的空白,极大地推动了计算机视觉领域中涉及光照理解和处理的研究进展。通过提供大规模、多光照条件下的数据,该数据集对于解决逆向问题,如材料识别和光照校正,具有重要意义。
4082
左闪
闪现
右闪
锋面闪光
材质贴图
画
金属
塑料
(透
明)
塑料
纸、
纸巾
织
物,
布
树叶
食品
陶瓷
皮革
橡
胶、
乳胶
花岗石
大理
木材
玻璃
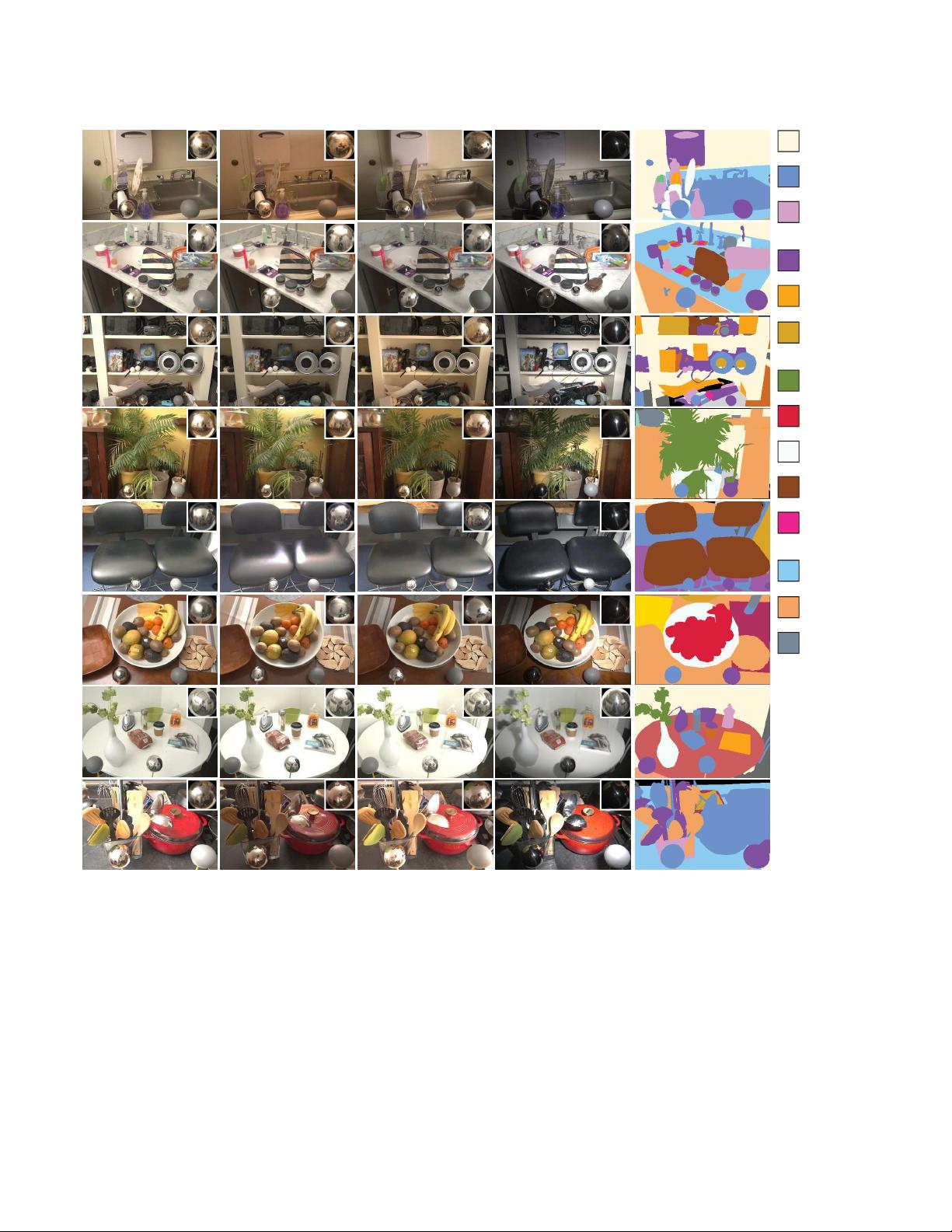
图
2.
我们数据集中的八个代表性场景。每个场景都是在
25
个独特的光线方向下拍摄的,其中
4
个在图中显示。我们努力在数据
集中包含各种房间和材质类型材料类型使用密集的分割掩码进行注释,如右图所示。
用括号内的曝光拍摄拓扑图。
作为后期处理,我们对光探针进行注释,并使用众
包为每个场景收集密集的材质标签,如第3.3节所述。
3.1.
图像捕获
我们的捕捉设备包括一个无反光镜相机(
索尼
α6500)和外部闪光灯单元(
索尼
HVL-F60 M),
剩余10页未读,继续阅读
112 浏览量
2024-02-09 上传
2021-04-08 上传
136 浏览量
183 浏览量
点击了解资源详情
326 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java搜索引擎指南:Lucene实战
- Windows设备驱动开发详解
- Oracle DBA在Unix下的命令参考手册
- SOA深度解析:架构、价值与构建技术
- ActiveReports实战教程:从入门到精通
- 优化ASP.Net性能:十大技巧解析
- C#数据库备份与恢复关键代码实现
- 国际开源大师齐聚北京:2008 Linux开发者研讨会
- ArcGIS二次开发实战指南
- 《开源》创刊:见证中国开源生态的崛起与转型
- Eclipse常用快捷键全解析:提升开发效率必备
- 使用Java将JTable数据导出到Excel
- 通用扑克牌程序源代码:数据结构与操作
- TortoiseSVN客户端安装与使用教程
- C#定时执行BAT脚本:8点、9点与13点任务
- DWR入门教程:快速掌握Ajax整合与开发
