可微分渲染:融合显隐式表面的高效采样与深度感知技术
PDF格式 | 1.97MB |
更新于2025-01-16
| 163 浏览量 | 举报
本文提出了一种创新的3D表面绘制方法,名为"基于不可微采样的可微曲面渲染",它结合了显式和隐式表示的优势。这项工作主要关注可微分渲染技术,旨在解决传统图形处理中的挑战,如网格表示的导数在局部变化时的不连续性。通过将不可微光栅化与可微深度感知点溅射相结合,该方法能够生成精确且平滑的表面渲染,即使在遮挡边界也能提供正确的导数信息。
具体来说,方法流程如下:
1. 不可微光栅化采样:首先,使用常规的、非微分的光栅化技术对3D表面进行采样,包括显式网格模型(如YCB玩具飞机的纹理三角形网格)和隐式表示(如NeRF生成的等值面)。这种方法处理了遮挡问题,确保了整体视图的完整性。
2. 深度感知点溅射:采样得到的点通过深度感知的点溅射操作进一步处理,这一步是可微分的,使得后续的图像合成过程能够计算出平滑的梯度信息。这个过程不仅适用于网格表面,也适用于隐式表示,如神经辐射场(NeRF)生成的等值面。
3. 优势与应用:与传统的体积绘制相比,这种方法更为高效,特别是在从NeRF这样的神经网络表示中提取等值面时。通过将预训练的NeRF转换为表面光场,作者实现了显著的渲染速度提升,例如128倍于原始NeRF的速度,这对于实时渲染和神经网络训练应用具有重要意义。
4. 可微分性与适用性:由于采样阶段可以是非微分的,这种方法兼容各种常见的表面提取和光栅化算法,使得大型3D模型的处理变得更加灵活。不仅如此,它还适用于隐式表示的逆绘制和神经网络训练,为这些领域的研究开辟了新途径。
这篇论文为3D图形渲染领域带来了革命性的进展,通过将不可微采样和可微操作相结合,解决了导数计算的问题,特别是在处理复杂表面和遮挡情况时。这不仅提升了渲染效率,也为基于神经网络的3D形状建模和理解提供了强大工具。
6088
×
个
基于不可微采样的可微曲面绘制
Forrester Cole
1
Kyle Genova
1
Avneesh Sud
1
Daniel Vlasic
1
Zhoutong Zhang
1
,
2
1
谷歌研究
2
麻省理工
摘要
我们提出了一种可微分渲染的
3D
表面,支持显式和
隐式表示,在遮挡边界提供衍生物,是快速和简单的
实现方法。该方法首先使用不可微光栅化对表面进行
采样,然后应用可微的、深度感知的点溅射来产生最
终图像。我们的方法不需要微分网格或光栅化步骤,
使其有效的大型
3D
模型和适用于从隐式表面定义提取
的等值面我们证明了我们的方法的有效性隐式,网
格,和参数化表面为基础的逆绘制和神经网络训练
appli-
阳离子。特别是,我们第一次展示了从神经辐射
场(
NeRF
)提取的等值面的高效的、可微分的渲染,
并且展示了
NeRF
的基于表面而不是基于体积的渲染。
1.
介绍
相对于底层场景参数计算渲染表面的导数在图形、
视觉和机器学习中引起越来越多的兴趣。三角形网格
是许多行业中的主要形状表示,但基于网格的衍生物
在局部或改变拓扑时是未定义的。因此,体积表示在
计算机视觉应用中的重要性已经上升,特别是神经辐
射场或NeRF [27]。到目前为止,这些体积形状表示已
经使用体绘制来绘制。体绘制是自然可区分的,但是
如果底层形状可以由表面很好地表示,
本文提出了一种方法来呈现显式(例如,网格)和
隐式(例如,等值面)表示,并产生精确、平滑的导
数,包括在遮挡边界处。我们的方法使用一个不可微
的光栅化步骤来采样的表面和解决occlu- sions,然后
splats的 样本 使用 深度感 知, differentiable splatting 操
作。因为采样操作不需要是可微分的,所以可以使用
任何常规的表面提取和光栅化方法(例如,[24]第二
十四话
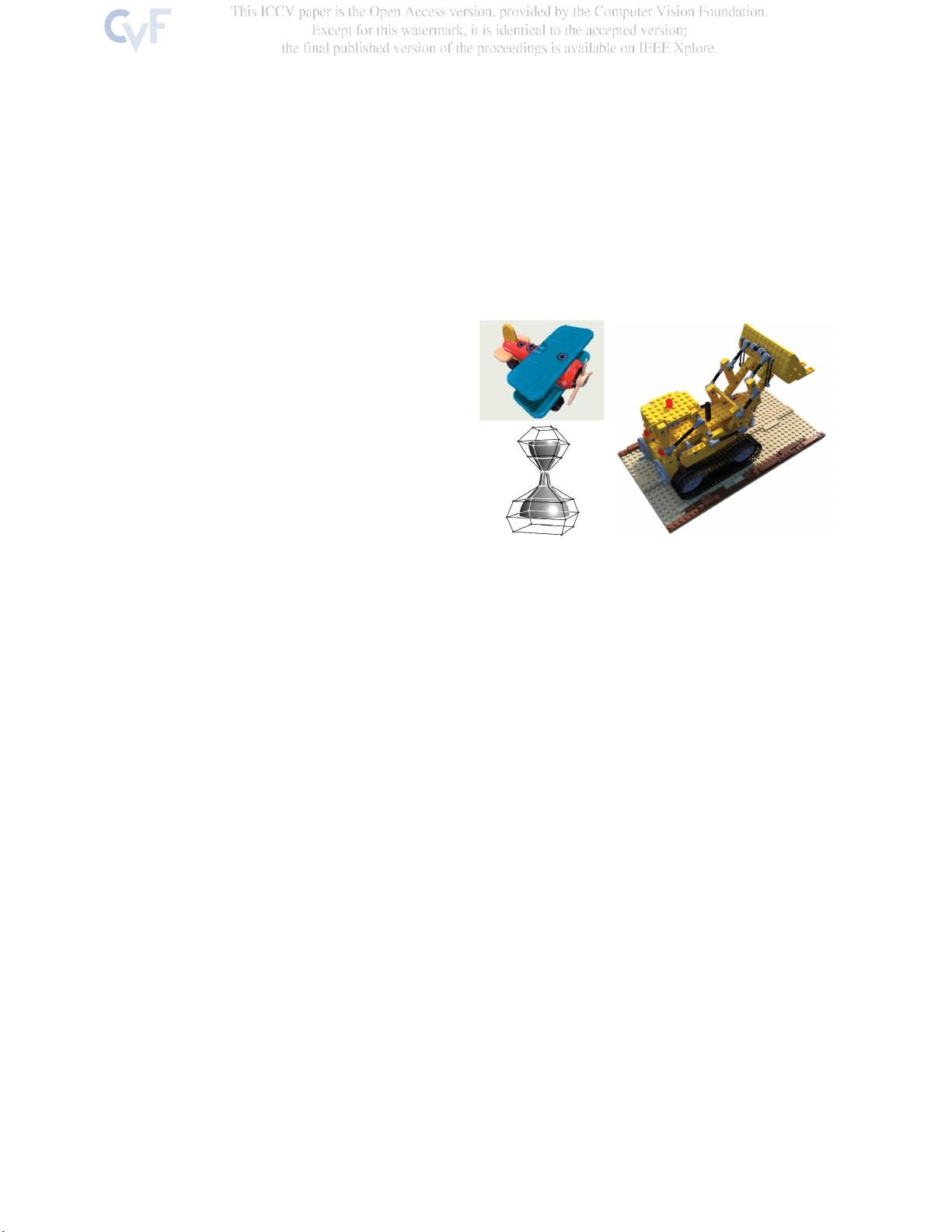
图1. 我们的方法提供了高效的,可区分的显式和隐式表面表
示渲染。示例包括纹理三角形网格(YCB玩具飞机[4])、三
次 B 样 条 曲 面 和 密 度 体 积 的 等 值 面 ( 来 自 NeRF 的 Lego
[27]
)。通过将预先训练的
NeRF
变成
表面光场来
渲染乐高。
由于表面光场只需要一个评价每个像素,我们实现了128的
渲染速度,ING与原来的NeRF相比。
也可使用所述斑点提供图像w.r.t.的平滑导数。遮挡边
界处的曲面溅射是在固定大小的像素网格上执行的,
并且使用自动微分容易由于不需要自定义梯度,因此
立即支持正向和反向模式微分。我们称这种方法
光栅
化,然后
splat(RtS)。
在光栅化和溅射步骤之间,表面样本可以通过在光
栅化图像缓冲器上评估的任何可微函数进行着色-而由
于着色和飞溅计算的复杂性受像素数量的限制,而不
是表面的复杂性,因此RtS能够扩展到高度详细的场
景。
可微分着色函数的一个示例是NeRF网络:给定空间
位置和观察方向,它输出相应的辐射。虽然NeRF是使
用体绘制训练的,但我们的方法可以将预训练的NeRF
转换为
表面光场
[28,39],从而消除了对昂贵的光线
行进的需求。我们将表面表示为从预训练的NeRF中提
取的密度场的等值面,使用NeRF颜色预测
下载后可阅读完整内容,剩余9页未读,立即下载
相关推荐






cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android实现密码输入框的自定义实例教程
- 小灰熊新版功能升级 支持64位系统
- 打造多功能jQuery日期选择器插件
- Cesium天气效果实现:雨雪雾效果演示与交流
- Cocos2d-x3.2横版游戏源码快速入门指南
- Python2.7版PyQt安装指南及下载
- 超级市场计费系统:基于C++的数据结构应用
- 实现点击事件控制DIV展开的JavaScript技术解析
- 《Photoshop CC 傻瓜书》英文版深度解析
- Python3标准库完整手册解析
- Awfice:基于数据URL的微型在线办公工具
- QT C++实现QtreeWidget数据递归与非递归展示方法
- 网络开发必备:PHP、JS、HTML和CSS文档大全
- 个人网站开发指南:使用Vue构建和部署
- 一步步教你安装MySql数据库及准备安装包
- Matlab GUI实现正弦曲线绘制与界面显示教程
