球面分形CNN:增强点云识别的旋转不变性
PDF格式 | 13.29MB |
更新于2025-01-16
| 40 浏览量 | 举报
"球面分形卷积神经网络用于点云识别"
在计算机视觉和机器人领域,点云数据是获取三维环境信息的重要方式。然而,点云数据的特性使其处理具有挑战性,因为它们的视角、密度和其他属性在不同场景下可能有很大差异。这需要处理算法具备抵抗旋转、扰动、密度变化和传感器及环境噪声的能力。尽管已经有许多工作致力于从非均匀密度中学习鲁棒特征[18]和处理3D旋转[6],但现有的点云处理算法在性能和鲁棒性之间仍然难以找到平衡。强大的表示模型[16,18]可能无法很好地泛化到未见过的旋转,而旋转等变算法[6,5]则表现相对较弱。
深度卷积神经网络(CNN)在图像识别方面取得了显著的突破[12,20,9],显示出强大的表征能力和泛化能力。然而,传统的2D CNN并不适用于点云数据,因为它们无法直接处理三维空间中的结构信息。为了解决这个问题,研究者们开始探索针对点云的三维卷积网络,但这些方法往往对旋转不敏感,限制了其在实际应用中的效果。
本文提出的“球面分形卷积神经网络”旨在提供一个通用、灵活且具有三维旋转不变性的点云识别框架。该框架利用球面对称性,通过引入正二十面体格点及其分形来近似和离散化球面。这种方法能够有效地捕获点云数据的空间分布,同时保持对旋转的不变性。通过这种方式,网络可以学习到更具旋转不变性的特征,从而提高对各种旋转场景的识别性能。
球面分形卷积的核心思想是将传统的欧几里得空间的卷积操作转化为球面上的操作。通过在球面上定义卷积核,网络能够处理来自不同方向的输入,而不会受到旋转的影响。分形的概念引入是为了进一步细化和扩展这种表示,使得网络能够在不同尺度上捕获点云的细节和结构。
在训练过程中,球面分形卷积网络可以学习到对旋转变化不变的特征表示,从而增强模型的泛化能力。此外,由于采用了分形结构,该网络还能够适应点云数据的不规则性和密度变化,提高对噪声的抵抗能力。实验结果可能表明,相比于其他点云处理算法,球面分形卷积神经网络在识别精度和鲁棒性上都有显著提升,尤其是在处理旋转复杂性和密度不一致性较大的点云数据时。
球面分形卷积神经网络为点云识别提供了一个创新的解决方案,它结合了球面对称性、分形理论和深度学习的优势,以实现更鲁棒、更精确的点云识别。这种方法对于自动驾驶、机器人导航、3D重建等依赖于点云处理的应用具有重要的实际意义。
robotics, where the viewpoints, density and other attributes
of points may vary a lot in different scenarios. Therefore,
point cloud processing algorithms should be resistant to ro-
tations, perturbations, density variability and other noise
coming from sensor and environment. Although several ef-
forts have been devoted to learn robust feature from non-
uniform density [
18] and 3D rotations [6], the robustness
of point cloud processing algorithm is still far from perfect.
Existing algorithms usually fail to balance performance and
robustness, where models with strong representation capa-
bility [
16, 18] cannot generalize well to unseen rotations
and rotation equivariant algorithms [
6, 5] show relatively
inferior performance.
Deep convolutional neural networks [
12, 20, 9]have
led to a series of breakthroughs for image recognition and
shown strong representation power and generalization ca-
452
0
球面分形卷积神经网络用于点云识别
0
饶永明,陆继文,周杰
清华大学自动化系,中国智能技术与系统国家重点实验室,中国北京国家信息科
学与技术研究中心,中国
0
raoyongming95@gmail.com;{lujiwen,jzhou}@tsinghua.edu.cn
0
摘要
0
我们提出了一种基于球面对称性的通用、灵活和三维旋转不
变的点云识别框架。通过引入正二十面体格点及其分形来近
似和离散化球面,可以轻松实现卷积来处理3D点。基于分形
结构,提出了一种分层特征学习框架和自适应球面投影模块
,以端到端的方式学习深度特征。我们的框架不仅继承了卷
积神经网络在图像识别中的强大表示能力和泛化能力,还将
CNN扩展到学习对旋转和扰动具有鲁棒性的特征。所提出的
模型既有效又稳健。全面的实验研究表明,与最先进的技术
相比,我们的方法在3D对象分类和部分分割任务上可以取得
竞争性的性能,同时,在旋转的3D对象分类和检索任务上,
与其他旋转不变模型相比,性能优势明显。
0
1.引言
0
点云处理的深度学习方法[16,
0
最近,基于3D体素或图像集合(即视图)的3D对象推理技术[18,2
2,6]引起了广泛关注。与直接处理3D点相比,直接处理3D点云更
具挑战性。点云处理的固有困难来自其不规则格式,这使得捕捉3D
对象的局部结构成本高昂。为了解决这个问题,先前的工作[18]利用
局部点集来通过动态查询每个位置的最近点来近似局部结构,这在
训练和推断过程中引入了相当大的计算成本,并且需要精心设计的
模块来处理不同区域的非均匀密度。点云通常是使用3D扫描仪获得
的,用于自动驾驶和机器人等实际应用中,点的视点、密度和其他
属性在不同场景中可能有很大的变化。因此,点云处理算法应该对
来自传感器和环境的旋转、扰动、密度变化和其他噪声具有抵抗能
力。尽管已经有一些工作致力于从非均匀密度[18]和3D旋转[6]中学
习鲁棒特征,但点云处理算法的鲁棒性仍然远未达到完美。现有的
算法通常无法在性能和鲁棒性之间取得平衡,具有强大表示能力的
模型[16,18]无法很好地推广到未见过的旋转,而旋转等变算法[6
,5]的性能相对较差。深度卷积神经网络[12,20,9]为图像识别带
来了一系列突破,并展示了强大的表示能力和泛化能力。
0
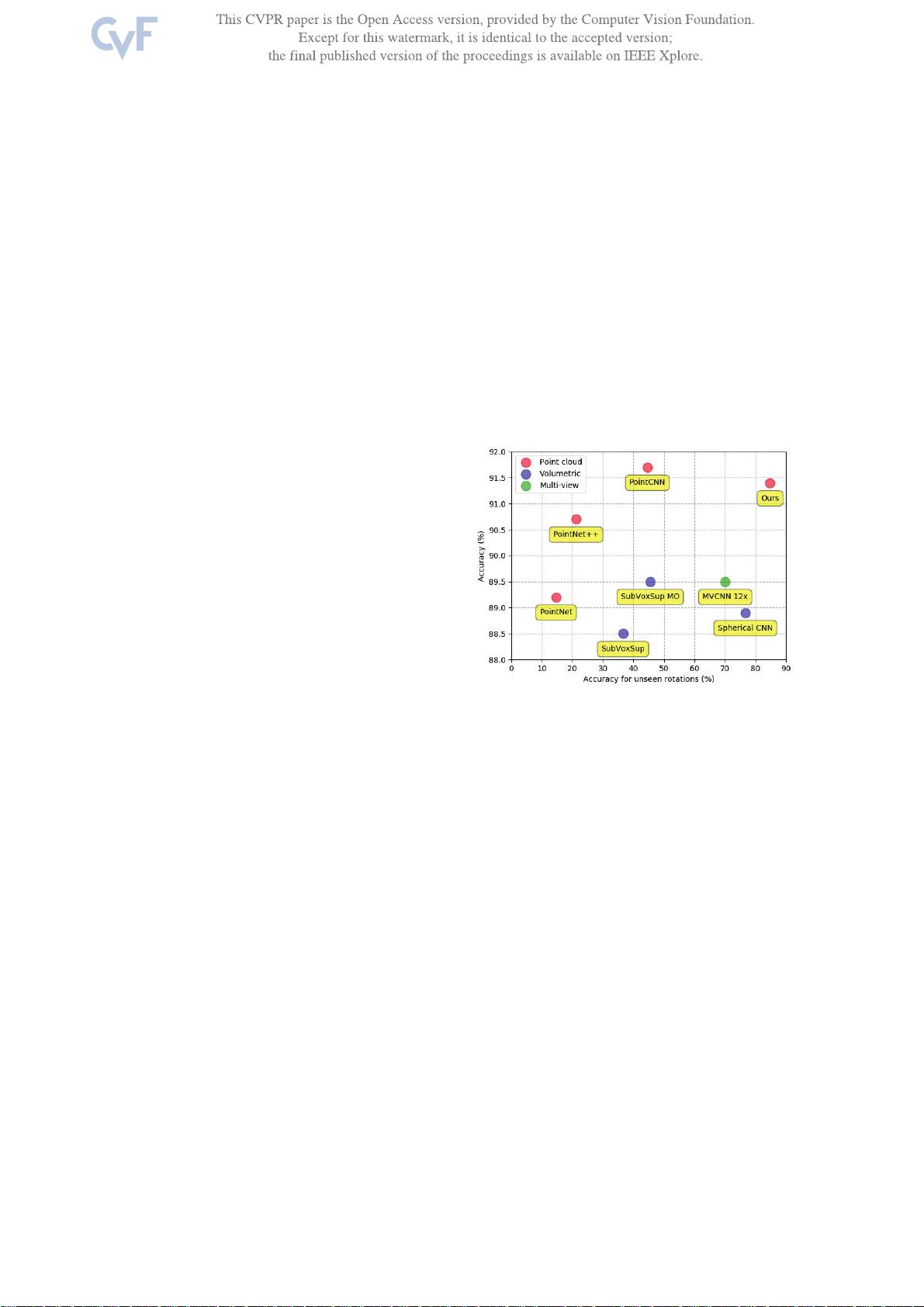
图1.
对未见过的旋转的泛化能力与ModelNet40的准确性。虽然先前的
点云深度学习算法显示出最先进的准确性,但它们在未见过的方向
上的泛化能力较差。此外,当出现任意旋转时,所有其他方法的性
能都会急剧下降。我们的模型在准确性和泛化能力上都表现出优越
的性能。
下载后可阅读完整内容,剩余8页未读,立即下载
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易酷免费影视系统:开源网站代码与简易后台管理
- Coursera美国人口普查数据集及使用指南解析
- 德加拉6800卡监控:性能评测与使用指南
- 深度解析OFDM关键技术及其在通信中的应用
- 适用于Windows7 64位和CAD2008的truetable工具
- WM9714声卡与DW9000网卡数据手册解析
- Sqoop 1.99.3版本Hadoop 2.0.0环境配置指南
- 《Super Spicy Gun Game》游戏开发资料库:Unity 2019.4.18f1
- 精易会员浏览器:小尺寸多功能抓包工具
- MySQL安装与故障排除及代码编写全攻略
- C#与SQL2000实现的银行储蓄管理系统开发教程
- 解决Windows下Pthread.dll缺失问题的方法
- I386文件深度解析与oki5530驱动应用
- PCB涂覆OSP工艺应用技术资源下载
- 三菱PLC自动调试台程序实例解析
- 解决OpenCV 3.1编译难题:配置必要的库文件
