




NIR虹膜检测的高效边缘图生成与FPGA硬件实现
50 浏览量
更新于2025-01-16
收藏 1.68MB PDF 举报
本文探讨了"近红外图像瞳孔检测的边缘图生成技术及硬件实现",由Vineet Kumar、Abhijit Asati和Anu Gupta三位作者在Birla Institute of Technology and Science Pilani,印度共同完成。这项研究发表于2017年的国际工程科学与技术期刊第20卷,694页。
文章的核心内容集中在设计一种创新的瞳孔检测方法,利用近红外(NIR)图像。首先,通过高斯滤波器平滑图像,接着进行二值化处理以突出图像中的关键特征。接着,利用Sobel边缘检测算法分别生成眼睛图像的两个独立边缘图。为了减少伪边缘,这两个边缘图通过交集操作合并为一个单一的、更为精确的边缘图。这种技术旨在提高瞳孔检测的准确性和速度,特别适用于那些追求低成本和低功耗的虹膜定位系统。
硬件实现部分,研究人员提出了一种基于现场可编程逻辑阵列(FPGA)的解决方案。FPGA被选为理想的硬件平台,因为它能够提供高效的并行处理能力,适合实时图像处理任务,如虹膜定位。这种硬件实现采用并行流水线结构,能够有效地降低计算延迟,满足嵌入式虹膜识别系统对实时性能的需求。
此外,文章强调了虹膜定位在虹膜识别流程中的关键作用,它是后续步骤(虹膜归一化、特征提取和模板匹配)的基础,但由于其复杂性和时间消耗,对于低成本嵌入式系统来说,优化这一阶段至关重要。作者提到的NIR技术在虹膜识别中的应用,考虑到其在低光照条件下的优势,使得这种方法在实际应用中具有显著的优势。
这篇文章不仅提供了新颖的瞳孔检测算法,还展示了如何将其高效地转化为FPGA硬件,这对于推动低成本、低功耗虹膜识别系统的研发具有重要意义。同时,它也展示了工程科学与技术领域的交叉融合,尤其是在硬件实现与图像处理技术的结合上。
×
×
696 V. Kumar et al. /
工程科学与技术,国际期刊
20
(
2017
)
694
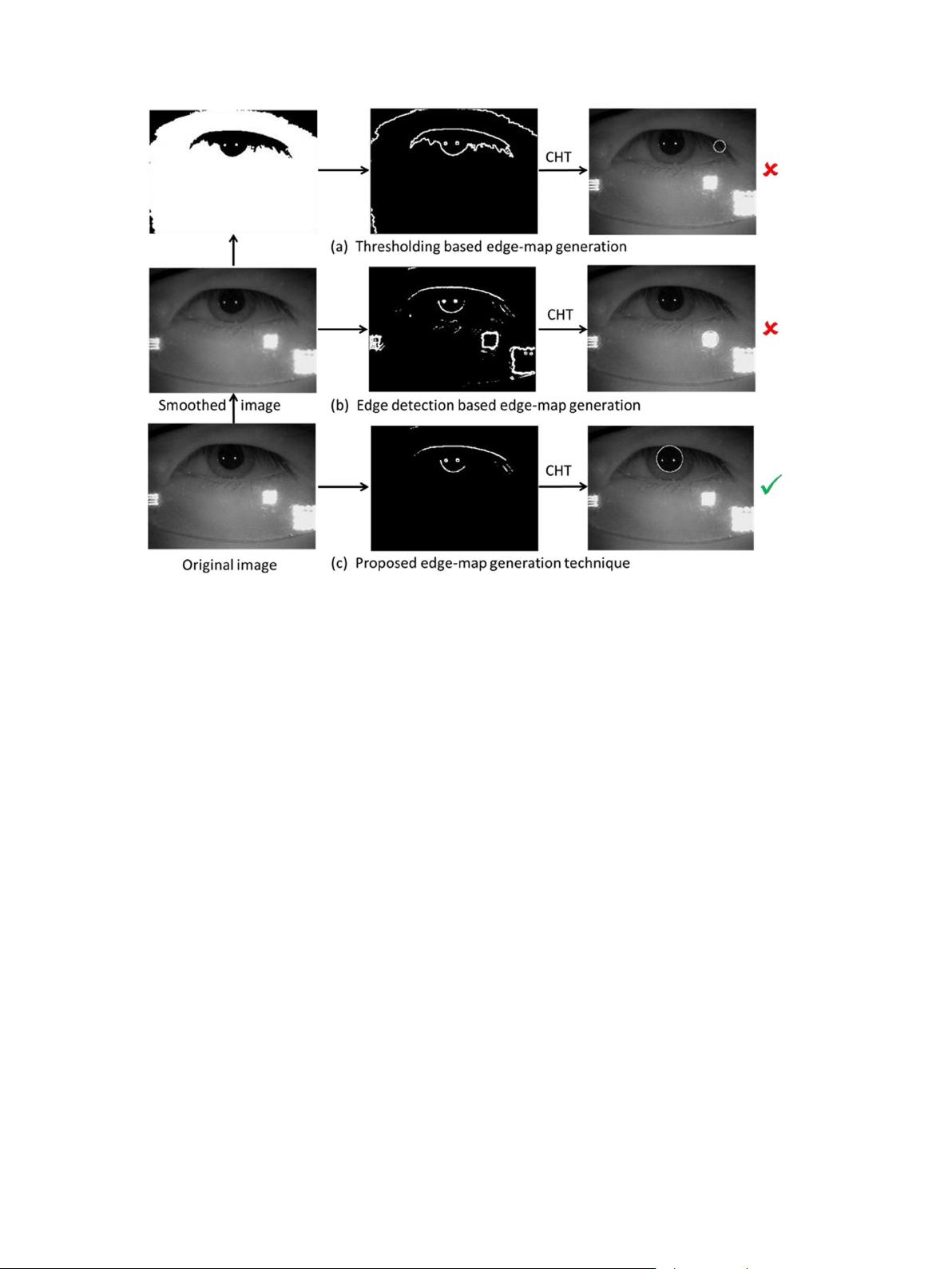
图三
.
用于瞳孔定位的边缘图生成技术:(
a
)导致错误瞳孔定位的基于阈值的技术
;
(
b
)导致错误瞳孔定位的基于边缘检测的技术
;
(
c
)所提出的使用逻辑
AND
来组合(
a
)和(
b
)的边
缘图的技术,其导致正确瞳孔定位。
侦测所提出的边缘图生成技术详细解释使用图。 四、
在所提出的技术中,用于瞳孔检测的最终边缘图通过组合两个边缘
图来生成:(1)通过对强度眼睛图像应用边缘检测而获得的边缘图,
如图4(c)所示;及(2)边缘─通过对眼睛图像应用强度阈值处理以分
割瞳孔区域,然后进行边缘检测而获得的图,如图4(e)所示。由于这
两个边缘图都包含共同的瞳孔轮廓,因此使用交叉操作(逻辑AND)将
它们组合在单个边缘图中,这最小化了由于诸如眼睑、睫毛和照明反射
等噪声而导致的假边缘,如图4(f)所示。图4示出了图4(c)和图4
(e)中的边缘图包含由于眼睑和睫毛引起的假边缘,但是由于相交操
作,这些假边缘在图4(f)中的眼睛图像的最终边缘图中被减少。该交
叉操作还去除了由于反射和非均匀照明而导致的假边缘。图4(c)中的
边缘图包含由于反射引起的边缘,但排除由于暗照明引起的边缘,而图
4(e)中的边缘图排除反射的影响,但包含由于暗照明引起的边缘。因
此,如图4(f)所示,对这两个边缘图的相交操作消除了反射和暗照明
的影响。图4(f)中提出的边缘图与图4(f)相比具有明显更少的假边
缘。 4(c)或(e)。
输入眼睛图像如图所示。
4
包含反射
斑点和非均匀照明,但是所提出的边缘图生成技术对于不具有反射斑点
和非均匀照明的图像也是有效和有用的,因为它还减少了由于眼睑、睫
毛 和眉毛等。这可通过附录A下图A1中的图1和图2进行说明。图A1
中的图像属于CILV 3数据库,其包含眼睑、睫毛和眉毛的遮挡作为主要
噪声。
下面描述所提出的技术(图
4
3.1.
高斯滤波
原始眼睛图像的平滑去除了随机噪声和不均匀的强度,这些噪声和
不均匀的强度可能导致边缘检测图像中不必要的假边缘。它还通过减少
二值图像中的假黑像素来帮助图像二值化(图像阈值化)步骤。平滑的
眼睛图像如图所示。 4(b). 利用高斯滤波器对原始眼睛图像进行平滑
处理
[20]
第
20
页
41
)的大小为
3 3
并且
sigma
(
r
)等于
1.0
。这种规模和
选择
sigma
值以使高斯滤波器的硬件实现资源高效且简单,这在第
4.3
节中讨论。
3.2.
Sobel
边缘检测
对平滑后的眼睛图像进行Sobel边缘检测,不进行细化处理.两个3 3
索贝尔滤波器掩模用于找到图像梯度的x导数和y导数分量,如[20](第
114页)所述。在边缘检测中选择合适的阈值,使得在图像中的强边缘
中的瞳孔边缘被检测到,并且弱边缘, 因为边缘边界未被检测到。利
用MATLAB中的edge()函数确定阈值的初始值,然后通过对数据库
图像的仿真和边缘检测图像的可视化来调整阈值。较高的阈值给出较少
的边缘像素,而较低的阈值给出较多的边缘像素。 阈值的最终值是经
过多次迭代的模拟和人工检查的边缘检测图像,然后它保持恒定的给定
的数据库。
图图
4
(
c
)示出了 在平滑的眼睛图像上应用
Sobel
算子之后的边缘
图图像。这幅边缘图
下载后可阅读完整内容,剩余10页未读,立即下载
125 浏览量
点击了解资源详情
点击了解资源详情
746 浏览量
108 浏览量
163 浏览量
2024-10-28 上传
2021-03-18 上传
376 浏览量

cpongm
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 海鸟沙滩主题网站模板设计赏析
- MongoDB 4.2版本压缩包下载链接分享
- Python机器学习资源包:源代码与课件
- SpyderOS:多功能Python脚本实现数学计算与计时功能
- Factur-X PHP库:简化Factur-X ZUGFeRD 2.0电子发票处理
- Java技术栈全攻略:面试、大数据与后端应用
- SpringBoot与CXF结合实现WebService开发案例
- 绿色版SQLyog中文客户端安装与使用简介
- norevoke: 快速备份QQ撤回消息的Java工具
- Java实训项目代码解析与实践
- 用RP2040实现激光扫描仪上的Asteroids游戏
- 星空棱镜唯美网页设计模板:HTML/CSS/JS星系动画
- Python实现LTTB算法 下采样代码免费下载
- 思维导图-crx插件:增强你的创意思维与记忆
- Scala开发者必备:XML-Lens库深度解析
- 2019年高级Java面试题精讲与进阶指南





















