高分辨率立体匹配:实时性能与深度感知研究
150 浏览量
更新于2025-01-16
收藏 1.94MB PDF 举报
"本文主要研究了在高分辨率图像中实现实时立体匹配的技术及其在自动驾驶等时间敏感应用中的重要性。作者提出了一种新的端到端框架,通过粗到细的层次结构来处理高分辨率图像,有效解决了内存和速度限制的问题。他们还创建了一个包含高分辨率立体对的数据集,用于训练和评估新方法。该方法在Middlebury-v3和KITTI-15数据集上表现出最先进的性能,并且运行速度快于现有竞争方案。此外,它的分层设计使得能够以低延迟快速预测近距离物体的深度,这对于自动驾驶等需要即时响应的应用至关重要。
立体匹配是确定图像对中对应像素间深度差异的过程,是获取场景三维信息的关键技术。传统观点认为,立体匹配在远距离感测中准确性较低,因为误差随着距离的平方增长。然而,高分辨率的立体匹配有可能克服这一限制,提供更精确的深度信息。
文章指出,尽管LiDAR(光探测和测距)是常见的深度感测解决方案,但其空间密度有限,尤其在长距离感测中。而高分辨率、全局快门的立体匹配系统可以解决这些问题,提供更高的密度和更好的动态场景适应性。作者通过实验验证了这种高性能与速度之间的权衡策略,适用于对时间要求严格的应用,如自动驾驶,能够在不牺牲精度的情况下实现快速深度感知。
此外,文章还强调了数据集在研究中的重要性,指出由于高分辨率立体数据集相对稀缺,所以创建新的数据集对于推动相关研究和技术发展至关重要。作者在ArgoAI的实习期间完成了这项工作,并计划公开数据和代码,以促进后续研究和应用。"
5517
{8
,
16
,
32
,
64}
解码器
203
m
s
(
75%
)
编码器
50
m
s
(
19%
)
SPP
分享
参考目标图像
金字塔特征
金字塔成本模型
高×宽×
3
高×宽
{8
,
16
,
32
,
64}
×
C
k
高×宽×深
k
{8
,
16
,
32
,
64}
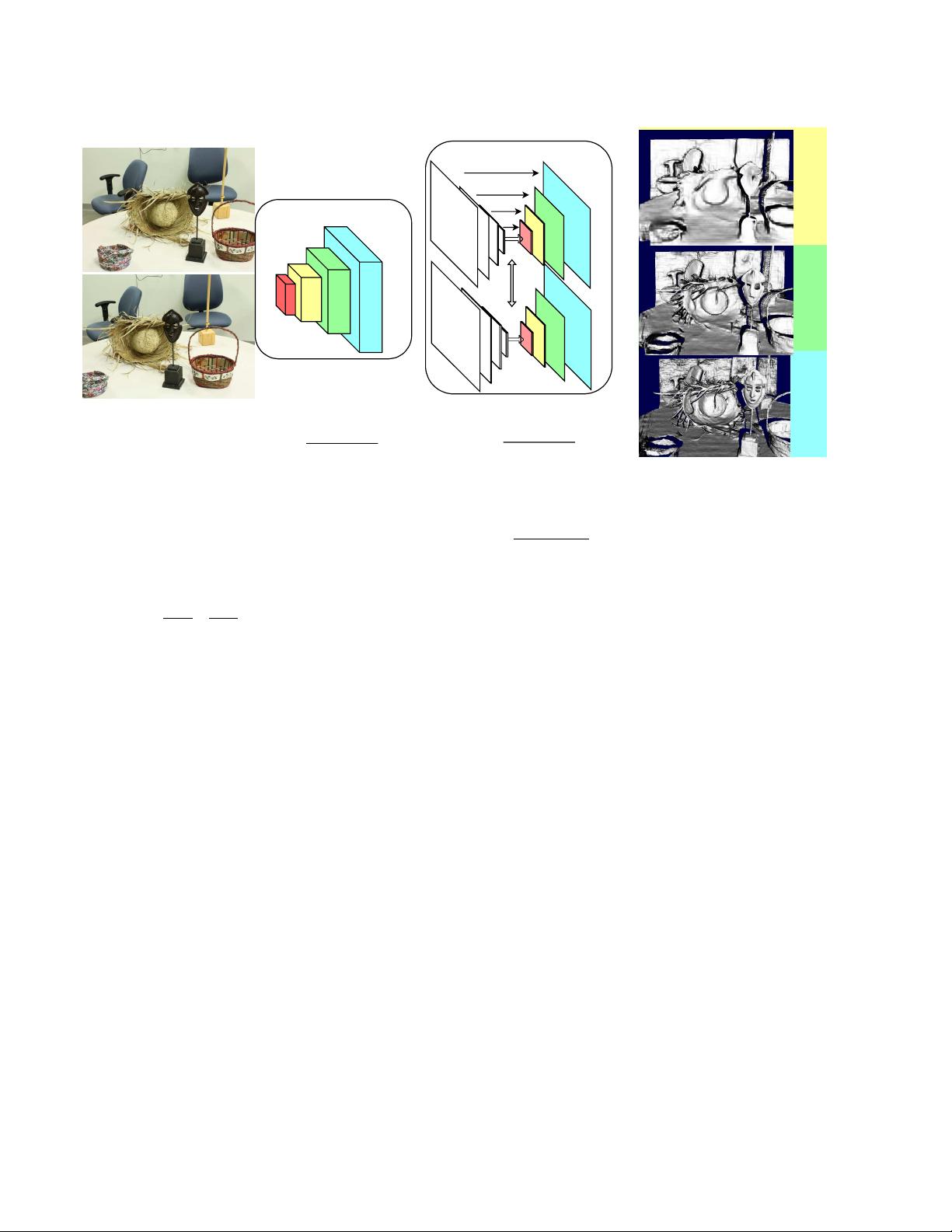
图
2
:我们的高分辨率立体声按需低内存架构。给定一对经过校正的高分辨率图像,我们使用自定义
resnet“
蝴蝶
”
编码器
-
解码器网络(我们称之为金字塔编码器)计算每个图像的多尺度描述符 这些描述符用于
通过从对极扫描线提取的潜在匹配特征的差异来构建每个尺度(
C
k
×
H
×
W
×
D
,其中尺度
k
∈ {
1
,
2
,
3
,
4
}和
C
k
∈
{
16
,
16
,
16
,
32
})的
4D
特征体积。每个特征体积都使用
3D
卷积进行
解码
或过滤,利用沿视差
尺寸以最小化内存。解码的输出(a)用于预测3D成本体积,其生成针对给定尺度的按需视差估计,以及(b)上
采样,使得其可以与下一特征体积组合。
金字塔
D
k
∈
{
D
max
,
D
max
,
D
max
,
D
max
}
表示特征通道的数量和视差箱的数量
4 2
在第k个尺度中,时间是在Titan X Pascal上针对具有256px的视差搜索范围的6兆像素输入测量的
改进语义分割。基于DispNet的架构[20,23]采用具有
跳跃连接的编码器-解码器方案最近,PWC-Net [33]使
用由粗到细的架构来扭曲特征,并在光流估计中实现
SOTA结果与我们的方法相似,GCNet [12]构建分层4D
特征体并使用3D卷积从粗到细处理它们,但我们的不
同之处在于我们成功地将粗到细原则应用于高分辨率
输入和随时按需处理。
3.
方法
在本节中,我们将介绍我们方法的关键要素:1)
有效的分层立体匹配体系结构,2)一组新颖的非对称
增强技术,以及3)用于训练的高分辨率合成数据集。
我们还为现实世界的自动驾驶引入了高分辨率立体声
基准。
3.1.
分层立体匹配(HSM)网络
我们设计分层粗到细网络的核心思想是首先通过网
络对高分辨率图像进行积极的下采样我们提供精确的
层和过滤器尺寸的补充。
设计原则:我们发现,从粗到精的设计原则至关重
要,特别是利用1)空间金字塔池(SPP)[41],它允
许特征在感受野中显着增加。如果没有这一点,与高
分辨率图像的其余部分相比,特征往往具有太小的感
受野。SPP [41]中的原始实现将金字塔特征上采样回原
始分辨率。为了减少内存,我们将池化特征保持在其
原生粗分辨率; 2)在视差维度上跨越的3D卷积,使我
们能够有效地处理高分辨率成本体积; 3)多尺度损失
函数。网络架构如图2所示。
特征金字塔编码器:我们使用一个特征金字塔编码
器来提取描述符进行粗到细的匹配。
1
阶段
3
309
毫秒
阶段
2
145
毫秒
阶段
90
ms
剩余10页未读,继续阅读
2022-02-14 上传
248 浏览量
248 浏览量
125 浏览量
266 浏览量
382 浏览量
739 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
