人类手在交互式物体理解中的关键作用与数据驱动挑战
PDF格式 | 43.62MB |
更新于2025-01-16
| 162 浏览量 | 举报
交互式物体理解是计算机视觉领域的重要课题,涉及理解物体的功能和操作方式。本文聚焦于人类手部在这一过程中的关键作用。作者提出通过观察自中心视频中的人类手部动作,可以为机器学习提供宝贵的信息,帮助理解物体的状态敏感特征和交互可能性。
首先,人类手部作为一个“探针”,能够快速定位并稳定活动中的物体,这对于机器学习来说是非常重要的线索。通过跟踪手部与物体的互动,研究者可以推断出物体可能的交互位置和操作方式,这些都是实现有效交互所必需的。例如,通过观察手部距离的变化,可以形成一个状态敏感的特征空间,使得机器能够识别物体的不同用途,而不仅仅是其基本类别。
其次,手部可以揭示物体的抓取区域和适宜的操作位置,这对于机器的探索行为和策略制定具有指导意义。比如,对于柜子这样的物体,它的状态(如关闭、打开、满载等)和提供给用户的抓取点(如把手)对于机器人执行打开或放置物品的任务至关重要。然而,现有的大规模标记数据集在这方面相对匮乏,因为物体的状态和操作方式通常依赖于复杂的上下文,且手动标注这类信息既耗时又难以避免主观偏差。
因此,本文提出了一种新颖的方法,利用人类手部在自我中心视频中的动态信息,解决大规模标记数据集的缺失问题。通过这种方法,研究者能够在EPIC-KITCHENS数据集上训练模型,学习到状态敏感的特征和物体的抓取区域,从而更深入地理解物体的交互性。这一研究不仅推进了计算机视觉在交互式场景下的应用,也为未来的机器人交互设计和自主学习提供了新的视角和数据驱动的支持。
Pr
3295
0
归一化w.r.t
0
物体的位置和尺度
0
交互对象
0
轨迹
0
归一化w.r.t
0
物体的位置和尺度
0
归一化w.r.t
0
物体的位置和尺度
0
手的轨迹
0
手的运动
0
o
t
0
h
0
t
0
h
00
手指抓取标签
0
接触中接触中接触中接触状态
0
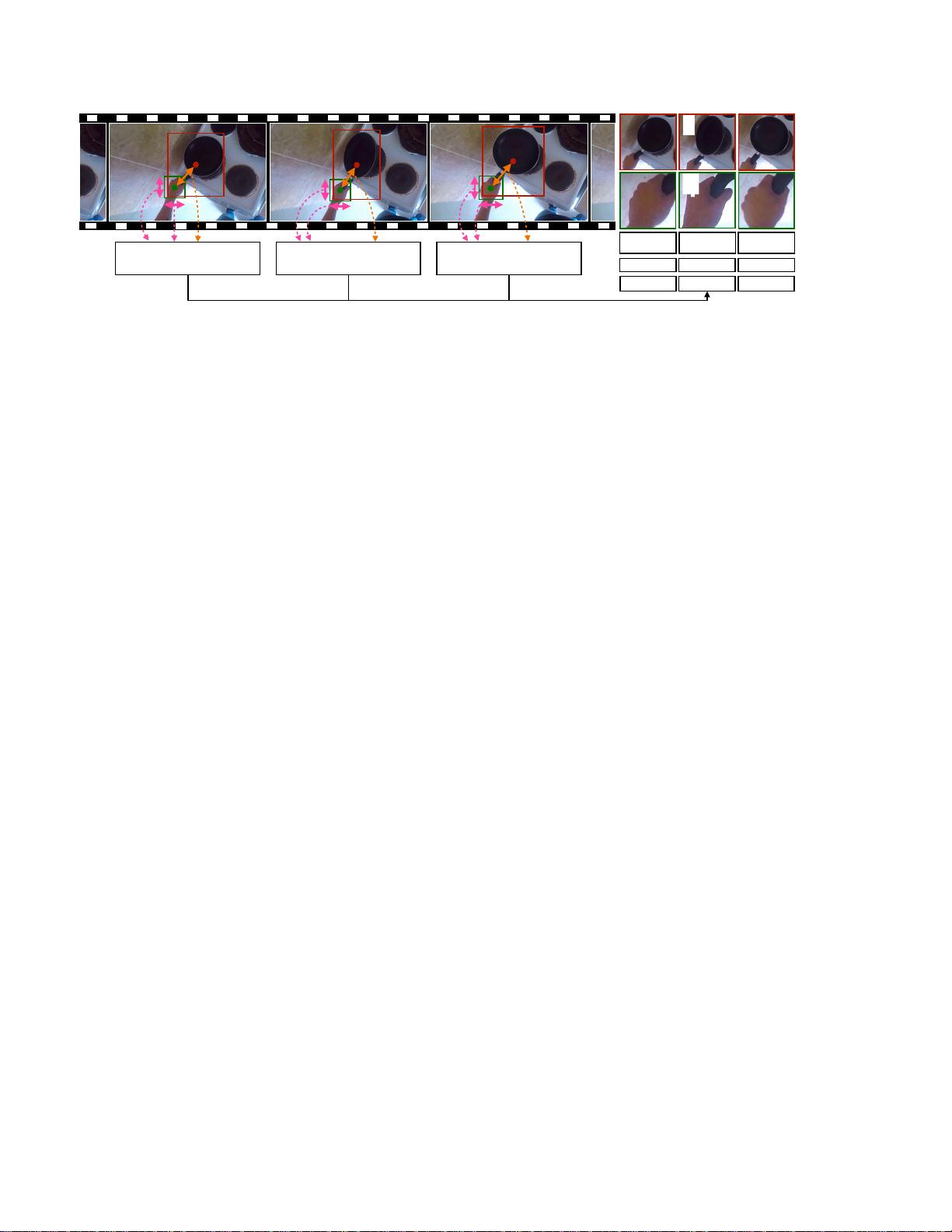
图2.
数据准备。给定来自EPIC-KITCHENS数据集的主观视角视频,我们从中获取手、交互对象和接触状态的每帧检测结果。这些检测结果在时间
上连接起来,形成配对的交互对象和手的轨迹。我们通过将手框的位置和相对于物体的尺度在3个相邻帧上堆叠来表示手在物体周围的运动。
交互对象的轨迹、手的轨迹和手的运动一起用于学习状态敏感的特征空间(第3.1节)。我们还通过在GUN-71数据集上训练的分类器获得手
抓取标签。检测到的手和交互对象配对以及这些手抓取标签用于学习交互区域和这些区域提供的抓取方式(第3.2节)。
0
3.方法
0
我们使用Damen等人的具有挑战性的EPIC-KITCHENS数据
集,并使用Shan等人的手和交互对象检测器。该检测器提
供了每帧的手和正在交互的对象的检测框,以及手的接触状
态(手是否接触某物)。我们还使用Rogez等人的71种抓取
类型分类数据集上训练的模型对检测到的手进行抓取类型的
预测。我们将检测到的手和交互对象在连续帧中连接起来,
形成交互对象和手的轨迹,如图2所示。我们使用这些轨迹
来学习状态敏感的特征(第3.1节)。通过每帧的预测,我
们学习手与物体的互动方式(第3.2节)。
0
3.1.通过时间和手的一致性获得状态敏感特征
0
我们的方法建立在两个关键思想的基础上:物体状态在时间
上的一致性和与手势姿态的一致性。我们的训练目标鼓励接
近时间或与相似的手势外观和动作相关的物体裁剪之间的相
似性,同时远离数据集中的随机其他物体裁剪。我们通过对
比学习实现这个直觉,并提出了一个联合损失:Ltemporal
+λLhand。Ltemporal
通过采样自然发生的时间增强作为额外的变换来鼓励时间一
致性。Lhand
使用手作为对比示例;正例是与物体裁剪在时间上对应的手
,负例是其他随机采样的手。Lhand
间接鼓励不同物体之间的相似性,这些物体通过手类似地进
行交互,因此很可能处于相似的状态。我们通过采样一个物
体裁剪oi
和一个时间上接近的手裁剪来构建对比学习的批次。
0
从图2中显示的轨迹中获取ha
i。我们还通过将手框相对于物体框在三个相邻帧上的位置和
尺度进行连接,来编码手的运动hmi。hai和hm
i共同表示手:hai描述外观,hm
i描述运动。我们从同一物体轨迹中采样另一帧o′i,作为o
i的时间增强。给定N个这样的四元组(oi,o′i,hai,hm
i),我们构建如图3所示的正对比负对。在Ltemporal
中,对于每个oi,o′i是正样本,所有其他对象oj和o′
j是负样本。在Lhand中,对于每个oi,[hai,hm
i](手的外观和运动)作为正样本,所有其他对象o′j和手
[haj,hmj]作为负样本;对于每个[hai,hmi],oi
是正样本,所有其他对象oj和手[haj,hmj]
是负样本。所有的裁剪oi,o′i,hai
都使用标准的SimCLR数据增强进行转换。我们通过将物体
和手裁剪通过卷积主干ϕo和ϕh
进行传递来设置对比损失。我们对于Ltemporal
使用一个投影头fo,对于Lhand使用两个投影头fh,g
h(分别用于物体和手裁剪)。hm
i通过位置编码进行编码,并附加到ϕh(hai)
中,然后输入到投影头gh
中。我们使用余弦相似度和归一化温度缩放的交叉熵损失(
NT-Xent),参考SimCLR
[6]。我们将同时使用这两个损失项的完整公式称为具有对象
-手一致性的时间SimCLR或TSC+OHC。我们还尝试只使用
时间项的时间SimCLR或TSC(即将λ设置为
0)。这些公式的输出是ϕ
o,它是我们的状态敏感特征表示。在第4.1节中,我们评估
了ϕo在物体状态分类任务上的质量。
0
3.2.通过上下文预测的物体可供性
0
我们解决的交互式物体理解的下一个方面是推断放置在场景
中的物体能够在哪些位置提供什么样的交互,我们将其统称
为物体
剩余10页未读,继续阅读
相关推荐


11 浏览量

9 浏览量
5 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小学水墨风学校网站模板设计
- 深入理解线程池的实现原理与应用
- MSP430编程代码集锦:实用例程源码分享
- 绿色大图幻灯商务响应式企业网站开发源码包
- 深入理解CSS与Web标准的专业解决方案
- Qt/C++集成Google拼音输入法演示Demo
- Apache Hive 0.13.1 版本安装包详解
- 百度地图范围标注技术及应用
- 打造个性化的Windows 8锁屏体验
- Atlantis移动应用开发深度解析
- ASP.NET实验教程:源代码详细解析与实践
- 2012年工业观察杂志完整版
- 全国综合缴费营业厅系统11.5:一站式缴费与运营管理解决方案
- JAVA原生实现HTTP请求的简易指南
- 便携PDF浏览器:随时随地快速查看文档
- VTF格式图片编辑工具:深入起源引擎贴图修改
