深度Hough投票:点云中高效3D物体检测的新方法
PDF格式 | 19.92MB |
更新于2025-01-16
| 136 浏览量 | 举报
深度Hough投票在3D物体检测中的应用
在现代3D物体检测领域,现有的方法深受2D检测器的影响,倾向于将3D点云转化为规则的网格结构(如体素网格或鸟瞰视图),以便于传统CNN处理。然而,这种做法忽视了点云数据的稀疏性和其固有的3D特性。本文介绍了一种创新的方法——VoteNet,它专注于在点云数据本身进行3D物体检测,避免了依赖于2D检测框架的局限性。
VoteNet是由Charles Qi、Or Litany等人开发的,研究人员来自Facebook AI Research和斯坦福大学。该模型基于深度点集网络和Hough投票机制,构建了一个端到端的解决方案,专为解决点云中物体检测的挑战设计。传统的3D物体检测面临的难题在于,3D物体的质心往往不位于任何表面点,直接预测边界框参数会带来精度问题。Hough投票作为一种投票机制,通过聚集和分析物体中心的潜在位置,成功地解决了这一难题。
模型的核心思想是,首先,通过深度学习网络对点云中的每个点进行特征提取,然后运用Hough投票的方式对物体中心进行全局的推测。每个点云点都会“投票”可能的物体中心位置,这些投票结果经过聚类和整合,最终形成对物体3D边界的精确估计,包括有向3D边界框以及物体的语义类别。这种方法不仅保留了点云的几何信息,还展示了对光照变化的良好鲁棒性,且相比于基于网格或投影的策略,具有更高的效率和计算优势,因为无需进行昂贵的3D卷积。
在实际的ScanNet和SUN RGB-D这两个大型真实3D扫描数据集上的实验结果证明了VoteNet的优越性。尤其是在没有依赖彩色图像的情况下,仅凭几何信息,VoteNet就能超越先前的方法,展示了其在3D物体检测领域的革新性和实用性。
VoteNet的出现标志着3D物体检测领域的一个新方向,即直接在点云数据上进行高效、精确的检测,而不是依赖于2D的间接转换。这种基于深度学习和Hough投票的策略,为未来处理不规则数据和优化3D场景理解提供了重要的参考。
Charles R. Qi
1
Or Litany
1
Kaiming He
1
Leonidas J. Guibas
1,2
1
Facebook AI Research
2
Stanford University
1
9277
0
基于深度Hough投票的点云中的3D物体检测
0
摘要
0
当前的3D物体检测方法受到2D检测器的很大影响。为了利
用2D检测器中的架构,它们经常将3D点云转换为规则网格
(例如体素网格或鸟瞰图像),或者依赖于2D图像中的检测
来提出3D边界框。很少有研究直接在点云中检测物体。在这
项工作中,我们回归到基本原理,为点云数据构建一个尽可
能通用的3D检测流程。然而,由于数据的稀疏性-从3D空间
中的2D流形中采样的样本-当直接从场景点预测边界框参数
时,我们面临一个重大挑战:3D物体的质心可能远离任何表
面点,因此很难在一步中准确回归。为了解决这个挑战,我
们提出了VoteNet,这是一个基于深度点集网络和Hough投
票的端到端3D物体检测网络。我们的模型在两个大型真实3
D扫描数据集ScanNet和SUN
RGB-D上实现了最先进的3D检测,设计简单,模型尺寸紧
凑,效率高。值得注意的是,VoteNet在不依赖于彩色图像
的情况下,仅使用几何信息就能胜过以前的方法。
0
1.引言
0
3D物体检测的目标是在3D场景中定位和识别物体。具体而
言,在这项工作中,我们旨在从点云中估计物体的有向3D边
界框以及语义类别。与图像相比,3D点云提供了准确的几何
信息和对光照变化的鲁棒性。另一方面,点云是不规则的,
因此典型的CNN不适合直接处理它们。为了避免处理不规则
的点云,当前的3D检测方法在各个方面都严重依赖于基于2
D的检测器。例如,[42,
12]将2D检测框架(如Faster/MaskR-CNN[37,
11])扩展到3D。他们将不规则的点云体素化为规则的3D网
格,并应用3D
CNN检测器,但这种方法无法利用数据中的稀疏性,并且由
于昂贵的3D卷积而导致计算成本高昂。或者,[4,
55]将点云投影为规则的2D鸟瞰图像,然后应用2D检测器来
定位物体。
0
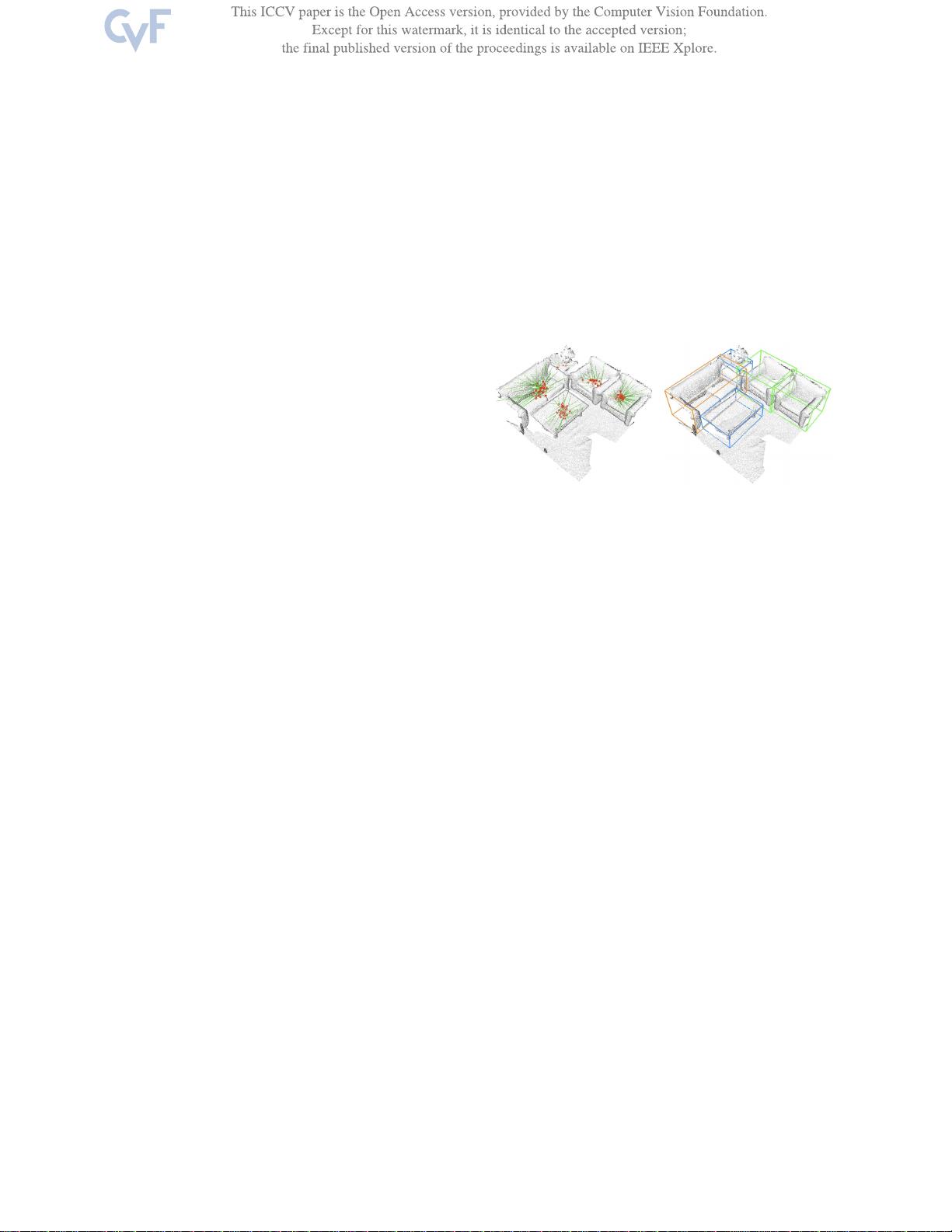
从输入点云到3D检测输出的投票
0
图1.
使用深度Hough投票模型在点云中进行3D物体检测。给定一个3D
场景的点云,我们的VoteNet对物体中心进行投票,然后对投票进
行分组和聚合,以预测物体的3D边界框和语义类别。
0
将点云转换为规则的2D鸟瞰图像,然后应用2D检测器来定
位物体。然而,这种方法会牺牲几何细节,这在杂乱的室内
环境中可能是关键的。最近,[20,
34]提出了一个级联的两步流程,首先在前视图图像中检测
物体,然后在从2D框中延伸出来的截锥点云中定位物体,但
这种方法严格依赖于2D检测器,如果在2D中未检测到物体
,则会完全错过该物体。在这项工作中,我们引入了一个以
点云为重点的3D检测框架,直接处理原始数据,不依赖于任
何2D检测器,无论是在架构还是在物体提议方面。我们的检
测网络VoteNet基于最近在点云学习中取得的进展,并受到
了广义Hough投票过程用于物体检测的启发。我们利用Poi
ntNet++
[36],这是一个用于点云学习的分层深度网络,来减轻将点
云转换为规则结构的需求。通过直接处理点云,我们不仅避
免了量化过程中的信息损失,而且利用了点云中的稀疏性,
只计算感知点。虽然PointNet++在物体分类和语义分割方
面取得了成功,但很少有研究探讨如何使用这样的架构在点
云中检测3D物体。一个简单的解决方案是遵循2D检测器的
常见做法,执行密集的物体提议。
下载后可阅读完整内容,剩余9页未读,立即下载
相关推荐

147 浏览量


cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
