运动特征网络:用于动作识别的固定运动滤波器
77 浏览量
更新于2025-01-16
收藏 1.18MB PDF 举报

运动特征网络:用于动作识别的固定运
动滤波器
Myunggi Lee
1
,
2
,
*
,Seungeui Lee
1
,
*
,Sungjoon Son
1
,
2
,Gyutae
Park
1
,
2
,and Nojun Kwak
1
1
首尔国立大学,韩国首尔
{
myunggi89
,
dehlix
,
sjson
,
pgt4861
,
nojunk
}
@ snu.ac.kr
2
V.DO Inc.,韩国水原
抽象。帧序列中的时空表示在动作识别任务中起着重要的
作用先前,使用光流作为时间信息结合包含空间信息的
RGB图像的集合的方法已经在动作识别任务中显示出很大
的性能增强然而,它具有昂贵的
计算成本,并且需要双流
(RGB和光流)框架。 在本文中,我们提出了MFNet(运动特
征网络)包含运动块,这使得它可以
在一个统一的网络,可
以训练端到端的相邻帧之间的时空信息编码。运动块可以
附加到任何
现有的基于CNN的动作识别框架,仅需要很小
的
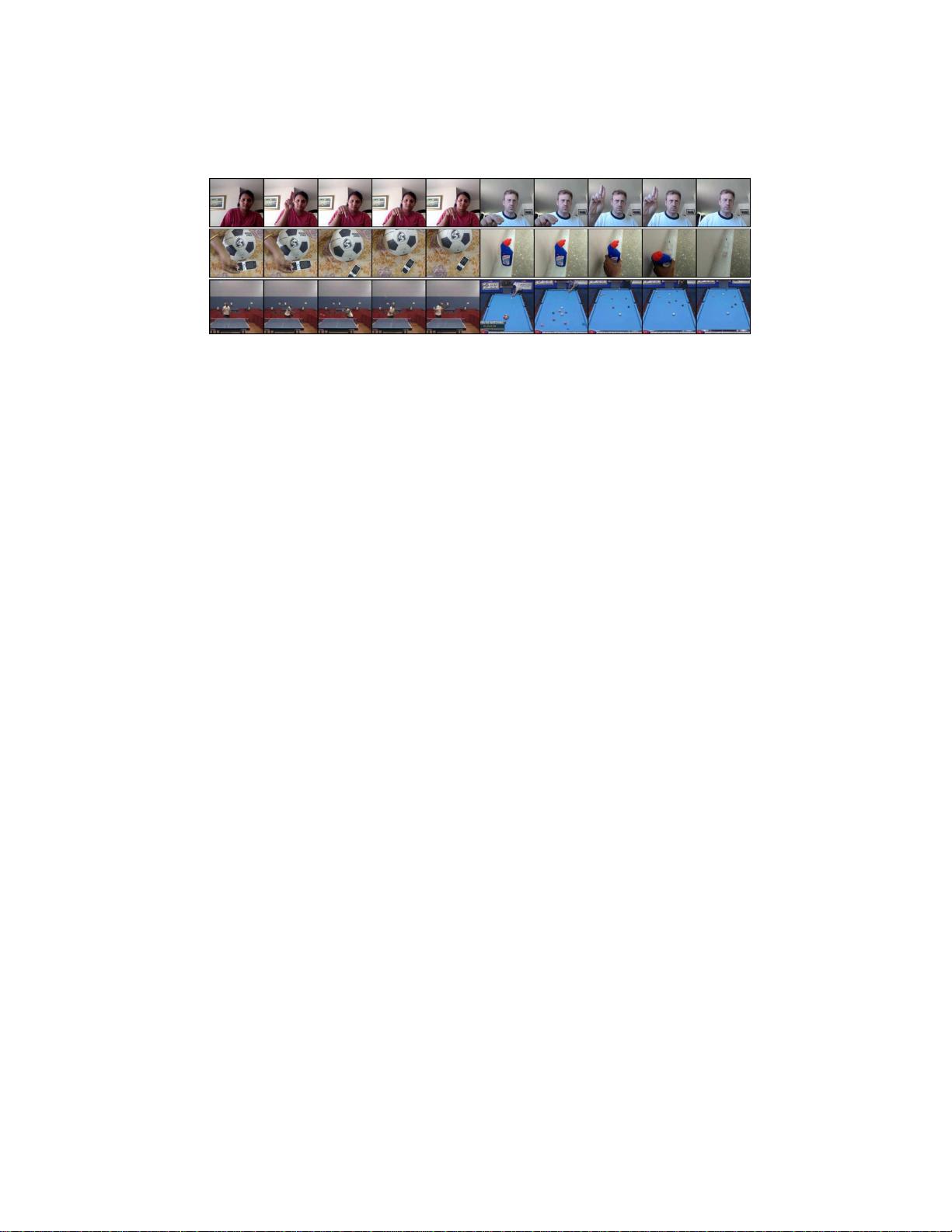
额外成本。我们在两个动作识别数据集(Jester和Something-
Something)上评估了我们的网络,并通过从头开始训练网
络,在两个数据集上都取得了有竞争力的性能
关键词:动作识别·运动滤波器·MFNet·时空表示
1
介绍
卷积神经网络(CNN)[17]最初设计用于表示 很好地发送了视觉场景的
静态外观。然而,如果底层结构的特征在于顺序和时间关系,则它具有
限制。特别是,由于识别视频中的人类行为需要空间外观和时间运动作
为重要线索,因此许多先前的研究已经利用了可以捕获运动信息的各种
模态,例如光流[33]和RGBdiff(连续RGB帧中的时间差)[33]。基于双流
[33,21,7]和利用这些输入模态的3D卷积[28,2]的方法 动作识别然
而,即使光流是提供短期时间信息的广泛使用的模态,它也需要大量的
时间来生成。 吃过了同样,基于3D内核的方法(如3D ConvNets)也需
要大量的计算负担和高内存需求。
* M.Lee和S.李同样贡献了论文。这项工作得到了韩国政府MSIP/IITP ICT
研发计划的支持(2017-0-00306)


剩余16页未读,继续阅读
2010-06-22 上传
220 浏览量
105 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Verilog实现的Xilinx序列检测器设计教程
- 九度智能SEO优化软件新版发布,提升搜索引擎排名
- EssentialPIM Pro v11.0 便携修改版:全面个人信息管理与同步
- C#源代码的恶作剧外表答题器程序教程
- Weblogic集群配置与优化及常见问题解决方案
- Harvard Dataverse数据的Python Flask API教程
- DNS域名批量解析工具v1.31:功能提升与日志更新
- JavaScript前台表单验证技巧与实例解析
- FLAC二次开发实用论文资料汇总
- JavaScript项目开发实践:Front-Projeto-Final-PS-2019.2解析
- 76云保姆:迅雷云点播免费自动升级体验
- Android SQLite数据库增删改查操作详解
- HTML/CSS/JS基础模板:经典篮球学习项目
- 粒子群算法优化GARVER-6直流配网规划
- Windows版jemalloc内存分配器发布
- 实用强大QQ机器人,你值得拥有
