MSSU-Net:多尺度监督算法提升肾脏与肿瘤CT分割精度
PDF格式 | 1.58MB |
更新于2025-01-16
| 48 浏览量 | 举报
MSS U-Net是一项创新的深度学习算法,专为医学图像分析设计,特别是在肾脏和肿瘤的CT图像分割领域展现出卓越性能。该研究发表在《医学信息学解锁19》(2020)上,关注的是多尺度监督在3D U-Net架构中的应用,即MSSU-Net。传统的3D U-Net是一种基于深度学习的卷积神经网络,广泛用于医疗影像分析,其核心是U型结构,能够有效地捕捉上下文信息。
赵文帅等人提出的MSSU-Net旨在解决肾脏和肾脏肿瘤分割的精度问题,这是一个在放射组学分析中至关重要的任务,因为它能帮助医生制定精确的手术计划。传统的手动分割方法依赖于临床医生的视觉判断,耗时且主观性较大。MSSU-Net通过结合深度监督和指数对数损失函数,优化了3D U-Net的训练过程,提高了模型的稳定性和效率。
在设计上,MSSU-Net引入了多尺度特征提取,它能够捕获不同尺度上的细节信息,这对于肾脏和肿瘤这类大小、形状各异的目标具有重要意义。此外,文章还提出了一种连接组件为基础的后处理策略,进一步提升了分割结果的准确性和完整性。通过与现有的分割技术进行比较,MSSU-Net在肾脏和肿瘤的Dice系数上分别达到了0.969和0.805的高精度,这在KiTS19挑战赛的数据集上得到了验证。
值得注意的是,虽然早期的研究倾向于使用无监督方法,如阈值、区域生长、聚类等,但MSSU-Net凭借深度学习的优势,提供了端到端的解决方案,避免了传统方法中的一些限制。随着3D卷积神经网络在医学领域的广泛应用,MSSU-Net展示了深度学习在自动肾脏和肿瘤分割中的潜力,有望推动医学影像分析的进一步发展和临床实践的改进。
W. Zhao
等人
医学信息学解锁
19
(
2020
)
100357
3
�
��
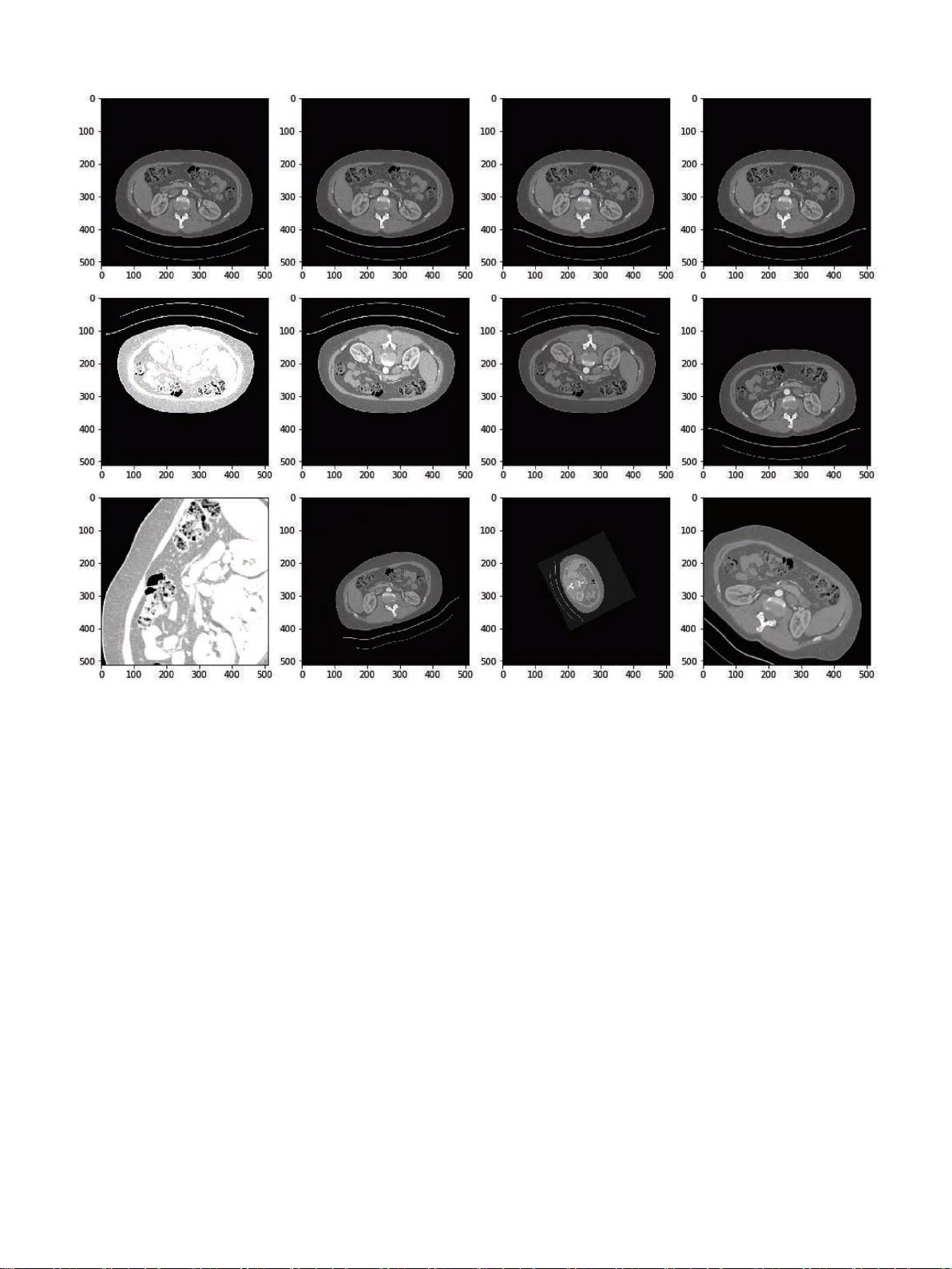
图二.
在我们的方法中使用的数据增强技术的效果。第一行是原始图像;第二行显示对比度增强和镜像的效果;第三行显示弹性变形、缩放、伽马校正和旋转。值得注
意的是,为了简单起见,我们显示2D图像而不是实际的3D图像
对数损失随着超参数数量的增加,我们可以更好地训练网络,并利用我
们的结果作为基线来分析3D U-Net的性能。因此,这项工作的主要贡献
如下:
1.
为3D U-Net引入多尺度监督方案,调整网络,从深层进行准确预测;
2.
利用指数对数损失[27]来缓解前景(肾脏和肿瘤体积)和背景之间的
类别不平衡问题。
通过整合这两种方法,我们已经提高了性能的原始三维U-Net架构。
此外,我们还设计了一种基于连通分量的后处理方法来去除被检测为明
显误报的断开的卷。本文的其余部分组织如下。第2节介绍了神经网络
的结构,以及实验中采用的不同方法,之后第3节介绍了实验结果和网
络性能分析。在第4节中,我们讨论了对医学图像分割采取的不同策
略。最后,第5节总结了工作,并概述了未来
研究方向。
2.
方法
目前使用深度学习进行医学图像分割的方法大致可以分为两种趋
势 。 首 先 , 神 经 网 络 的 输 入 数 据 不 是 原 始 数 据 , 而 是 感 兴 趣 区 域
(ROI)。这自然允许跨多个指标的更高准确性和性能。尽管如此,总
体性能可能会受到ROI检测和提取中的不确定性的显著影响。其次,在
最近的趋势中,已经引入了端到端分段架构。在这些中,原始图像被馈
送到网络,并且网络的输出是具有与输入相同大小的图像的pixel-wise分
割。我们遵循这种端到端的架构,从原始体积CT图像中同时分割肾脏和
肾脏肿瘤。这允许我们的方法在临床环境中的直接应用。
馈送到CNN的CT数据由腹部CT图像组成
有几百片每个三维区域称为一个体积。 典型输入为512 512 200 voX
els,其中200是 切 片 , 512 512表示每个图像的分辨率,单位为
PIXELS。由于输入大小很大,因此不可能立即将数据馈送到网络中,特
别是当图形处理单元(GPU)用于加速CNN时。在GPU中,挑战来自有
限的内存量和一般所需的计算能力。因此,我们遵循最近的趋势,在基
于补丁的训练和推理我们的网络架构。
本节的其余部分描述了培训
剩余10页未读,继续阅读
相关推荐



cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言集成Mandrill API的gem开发
- 开源嵌入式qt软键盘SYSZUXpinyin可移植源代码
- Kinect2.0实现高清面部特征精确对齐技术
- React与GitHub Jobs API整合的就业搜索应用
- MATLAB傅里叶变换函数应用实例分析
- 探索鼠标悬停特效的实现与应用
- 工行捷德U盾64位驱动程序安装指南
- Apache与Tomcat整合集群配置教程
- 成为JavaScript英雄:掌握be-the-hero-master技巧
- 深入实践Java编程珠玑:第13章源代码解析
- Proficy Maintenance Gateway软件:实时维护策略助力业务变革
- HTML5图片上传与编辑控件的实现
- RTDS环境下电网STATCOM模型的应用与分析
- 掌握Matlab下偏微分方程的有限元方法解析
- Aop原理与示例程序解读
- projete大语言项目登陆页面设计与实现
