深度逐点PVN3D:6DoF姿态估计的创新关键点网络
PDF格式 | 1.25MB |
更新于2025-01-16
| 121 浏览量 | 举报
PVN3D:深度逐点3D关键点投票网络在6DoF位姿估计中的应用
【介绍】
本文探讨的是6DoF(六个自由度)对象姿态估计问题,这是计算机视觉领域中的核心任务,因为它对机器人抓取、自动驾驶、增强现实等众多实际应用至关重要。由于光照变化、噪声、遮挡和物体切割等复杂因素,精确的6DoF估计具有高度挑战性。传统的非深度学习方法往往依赖于人工设计的特征匹配,如SIFT或SURF,但这些方法在面对光照变化时表现受限。
近期,随着深度学习的兴起,特别是深度神经网络(DNN)的引入,研究者们开始探索如何利用这些技术进行端到端的6DoF估计。早期的工作,如[50,52],尝试直接通过DNN回归物体的旋转和平移,但这往往难以捕捉到物体的精确结构信息。
【方法创新】
PVN3D(Point Voting Network for 3D Pose Estimation)提出了一种新颖的数据驱动策略,不同于直接回归,它采用了关键点检测的方法。首先,网络设计了一个深度Hough投票网络,专门针对RGBD(RGB图像和深度图像)数据,用于高效地检测物体的3D关键点。这种方法是对2D关键点方法的扩展,后者已经在基于RGB的6DoF估计中展现出优异性能。
通过深度Hough投票机制,网络能够从每个像素点对选定的关键点进行投票,随后聚集并选择关键点的聚类中心作为预测结果。这种方法有效地结合了刚体物体的几何约束和深度信息,使得网络学习和优化更加容易,同时增强了对复杂场景的鲁棒性。
【实验验证】
作者们进行了大量实验,旨在证明在6DoF姿态估计任务中,3D关键点检测的有效性和优势。实验结果显示,相比于现有的最先进的方法,PVN3D在多个基准测试中取得了显著的性能提升,特别是在光照变化、遮挡和物体截断等具有挑战性的条件下。
【结论与开源资源】
这项工作不仅提升了6DoF姿态估计的准确性和鲁棒性,而且展示了深度学习技术在解决这类问题中的潜力。PVN3D的成功案例表明,利用深度关键点检测和几何约束的结合,可以在保持高效的同时处理复杂的视觉任务。所有相关的代码和视频资料已发布在GitHub上,以便于研究者们进一步研究和参考(<https://github.com/ethnhe/PVN3D.git>)。
【未来展望与资助背景】
这项研究得到了国家重点研究发展计划(2018YFC0831700)的支持,预示着在未来的研究中,深度学习将继续推动6DoF姿态估计技术的发展,为更多实际应用场景提供更为精准和可靠的解决方案。
11634
i
=1
j
=1
我
我
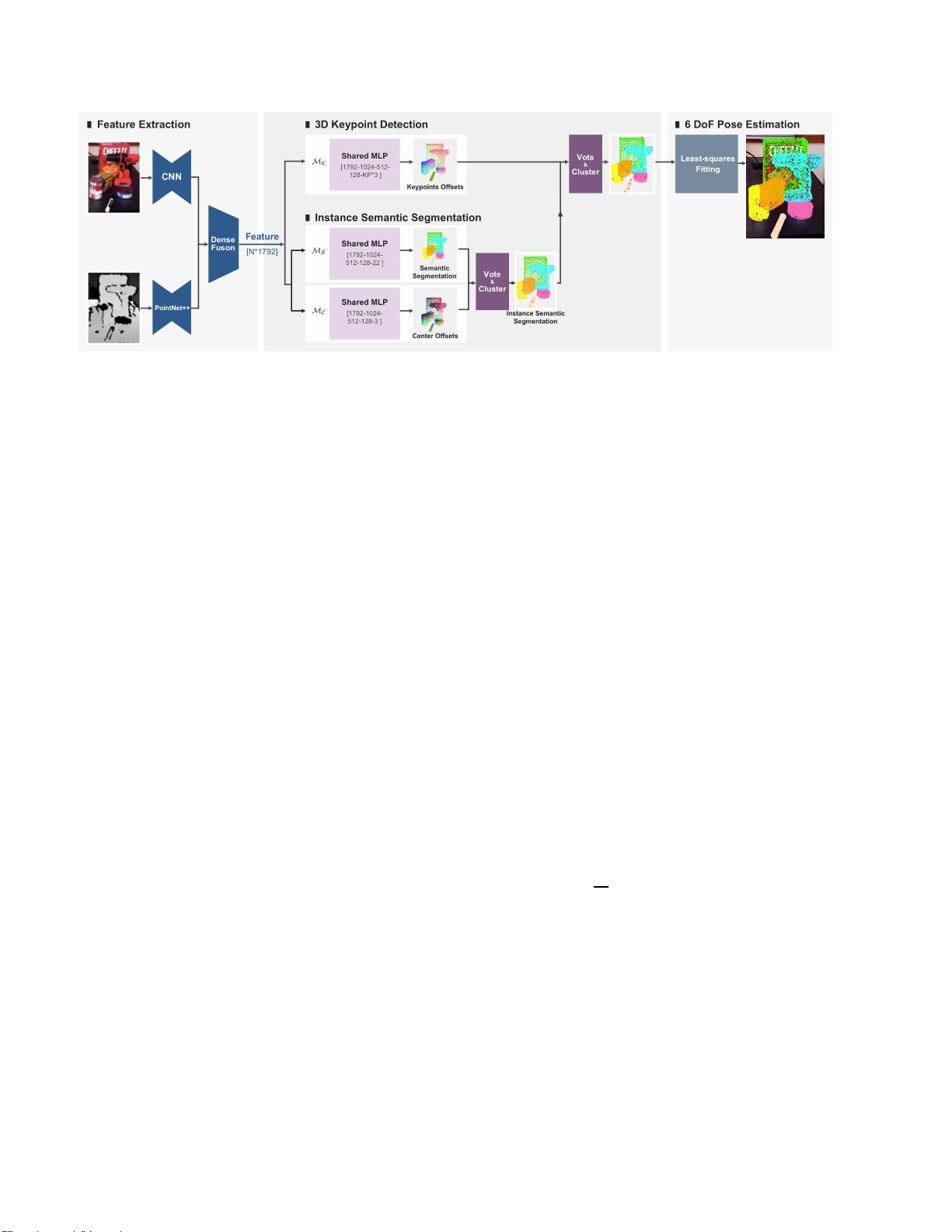
图
2. PVN3D
概述。特征提取模块从
RGBD
图像提取每点特征。它们被馈送到
模块M
K
、M
C
和M
S
中,以分别预测到关键点、中心
点和每个点的语义标签的平移偏移。然后应用
聚类算法来区分具有相同语义标签的不同实例,并且相同实例上的点投票给它们
的目标关键点。最后,将最小二乘拟合算法应用于预测的关键点以估计
6DoF
姿态参数。
3.
该方法
给定RGBD图像,6DoF姿态估计的任务是估计将对
象从其对象世界坐标系变换到相机世界坐标系的刚性
变换这种转换包括一个
三维旋转
R∈SO
(
3
)和平移
t ∈R
3
。
3.1.
概述
为了解决这一任务,我们开发了一种基于深度3D
Hough投票网络的新方法,如图2所示。所提出的方法
是一个两阶段的管道与三维关键点检测,其次是姿态
参数拟合模块 。更 具 体 地说 ,以RGBD 图 像 作为 输
入,特征提取模块将用于融合外观-
角特征和几何信息。所学习的特征将被馈送到3D关键
点检测模块
M
K
中
它被训练来预测每个点相对于键的偏移量,
通过我们设计的监督损失和我们采用的几个训练细节
来实现
3D
关键点检测模块。如图2所示,利用由特征提取
模块提取的每点特征,3D关键点检测模块
MK
用于检测
每个对象的3D关键点。具体地说,
M
K
预测每个点的
欧几里得平移偏移,
ble指向目标关键点。然后,这些可见点与预测的偏移
一起为目标关键点投票然后通过聚类算法收集投票
点,并选择聚类中心作为投票关键点。
我们给一个更深层次的看法
M
K
如下。 给定一组
可见种子点
{
p
i
}
N
和一组选定关键点
{
k
p
j
}
M
属于
相同
的对象实例
I
,我们记为
p
i
=
[
x
i
;
f
i
]
,
其中
x
i
是
3D
坐标,
f
i
是
ex
。
特色。 我们表示
k
p
j
=
[
y
j
]
,其中
y
j
是
关键点的
3D
坐
标。
M
K
吸收每个种子的特征
f
i
点并为它们生成平移偏移
{
of
j
}
M
i j
=1
点 此外,我们还包括一个实例分割
用于多个对象处理的模块,其中语义分割模块
MS
预测
每个点的语义标记。
其中
,
表示从第
i
个种子点到第
j
个
关键点的平移偏
移。然后,投票的关键点可以
表示为
v
k
p
j
=
x
i
+
o
f
j
。
监督学习
bel
,中心投票模块
M
C
预测每个点
j
i
i
偏移到对象中心。通过学习的每点偏移,
对于
i
,我们应用
L1
损失:
聚类算法[7]用于区分具有相同语义标签和点的不同实
例,
1
Σ
N
L =
Σ
M
||
I
(
p
||
I
(
p
I)
(1
)
相同的实例为它们的目标关键点投票。最后,将最小
二乘拟合算法应用于预测
关键点
N
i
=1
j
=1
关键点来估计6DoF姿态参数。
3.2.
学习算法
我们的学习算法的目标是训练用于偏移预测的3D关
键点检测模块
M
K
以及用于实例级分割的语义分割模块
M
S
和中心投票模块
M
C
这自然使训练我们的网络多任
务学习,这是
其中
,
是地面实况平移偏移;M是所选择的目标关键点
的总数;N是种子的总数,I是一个指示函数,只有当点
p
i
属于实例I
时才等于
1,否则等于0。
实例语义分割模块。为了处理具有多个对象的场
景,先前的方法[50,53,39]利用现有的检测或语义
分割架构来预处理图像并获得ROI(区域
我
我
我
剩余10页未读,继续阅读
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易酷免费影视系统:开源网站代码与简易后台管理
- Coursera美国人口普查数据集及使用指南解析
- 德加拉6800卡监控:性能评测与使用指南
- 深度解析OFDM关键技术及其在通信中的应用
- 适用于Windows7 64位和CAD2008的truetable工具
- WM9714声卡与DW9000网卡数据手册解析
- Sqoop 1.99.3版本Hadoop 2.0.0环境配置指南
- 《Super Spicy Gun Game》游戏开发资料库:Unity 2019.4.18f1
- 精易会员浏览器:小尺寸多功能抓包工具
- MySQL安装与故障排除及代码编写全攻略
- C#与SQL2000实现的银行储蓄管理系统开发教程
- 解决Windows下Pthread.dll缺失问题的方法
- I386文件深度解析与oki5530驱动应用
- PCB涂覆OSP工艺应用技术资源下载
- 三菱PLC自动调试台程序实例解析
- 解决OpenCV 3.1编译难题:配置必要的库文件
