DLNet模型提升果园遮挡果实识别与分割的性能
PDF格式 | 1.72MB |
更新于2025-01-16
| 154 浏览量 | 举报
DLNet模型是一项针对自然果园中被遮挡果实的精确识别和分割的创新解决方案,它发表于沙特国王大学学报。该模型由山东师范大学信息科学与工程学院和卡迪夫大学工程学院的研究团队共同开发,旨在应对果园中复杂环境下的挑战,如遮挡、同色背景和损坏情况。
DLNet模型的核心在于结合了一种改进的目标检测网络RS-RFP和一个专门的分割网络。RS-RFP是基于全卷积一阶段目标检测(FCOS)的扩展,通过特征金字塔网络(FPN)和引入的高斯非局部注意机制构建出细化金字塔网络(RFP),这有助于提高对残留网络(ResNet)生成的语义特征的解析能力。这种方法提高了模型对目标检测的准确性。
而DLNet分割框架则是采用了双层图形注意力网络(GAT)设计,这种独特的结构将图像视为两个重叠层次,上层GAT负责检测被遮挡的对象,下层GAT则负责识别部分被遮挡的实例,同时捕捉遮挡关系并考虑对象间的交互。这种设计使得模型能够自然地描绘遮挡和遮挡实例之间的边界,并且更加灵活地处理遮挡问题。
实验结果显示,DLNet模型在果实识别和分割任务上的性能优越,平均精度(AP)框和AP掩模分别达到了80.9%和81.2%,证明了其在实际应用中的高效性和鲁棒性。这对于果园采摘机器人的自动化操作,如精准定位和采摘遮挡的果实,具有重要意义。此外,该研究还强调了深度学习技术在农业领域的潜力,特别是在作物识别和监控方面,如水果产量评估、生长监测和病害检测。
DLNet模型通过集成先进的目标检测和分割策略,为解决果园中遮挡果实的识别难题提供了一种创新且实用的方法,这对于推动农业机器人技术的发展以及提升农作物管理效率具有积极的推动作用。
J. Liu
,
Y.Zhao
,
W.Jia
等人
沙特国王大学学报
7261
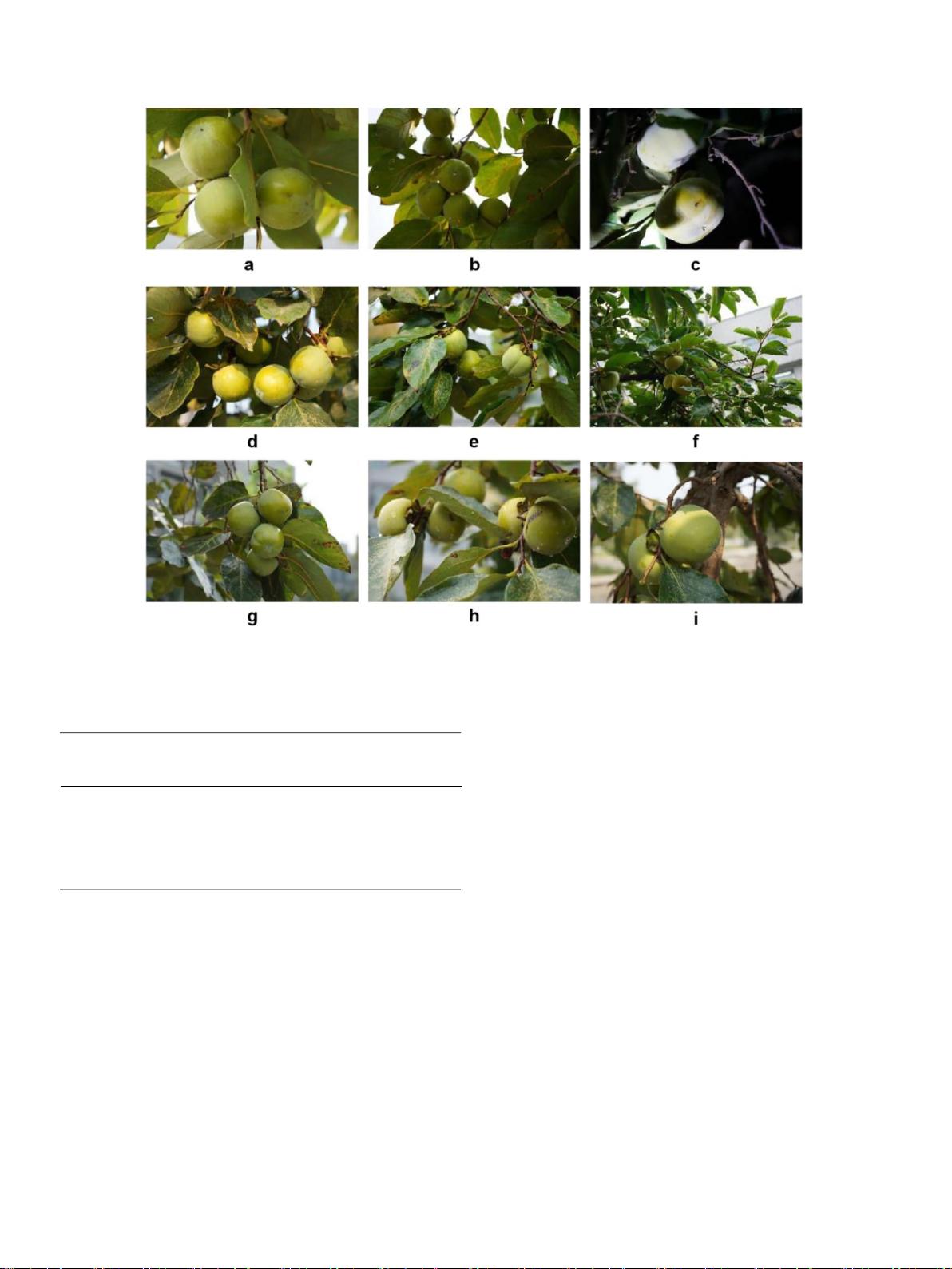
Fig. 1.复杂自然场景下的柿子实物图像。注意事项:a-c示出了在不同光强度下的图像; d-f示出了不同类型的阴影(果实重叠、叶子阴影、树枝阴影); g-i示出了在不同光角度下的图
像。
表
1
柿子数据集的分布。
注释信息在同一个
json
文件中,训练集和验证集在每个干扰中以
7
:
3
的比例划分。
时间场
景划分
训练套装图片
(张)
/
水果(件)
验证集图片(张)
/
水果(片)
总和
图片(张)/水果
(件)
每种干扰类型的影响程度。最后,从apple训练集中总共获得了3703张
图像,从验证集中获得了1587张图像,并在MS COCO数据中获得了注
释文件-
早上
65/266
28/84
93/350
设置格式分别生成。
中午
87/278
37/142
124/420
下午
69/521
29/129
98/650
雨
388/1865 165/659 553/2524
注:图像采集和数据集划分表。收购于日间在自然阳光下进行,并于夜间使用LED灯辅
助照明对于在每个时间段下采集的图像,训练集和验证集按照图像数量的3:1的比例划
分。
将标记图像中每个果实的最小外矩阵作为真帧并生成相应的json文件,
按7:3随机组合成训练集和数据集,其中柿子数据集训练集中的图像数
为398,测试集中的图像数为170。由于苹果数据集中的图像和标记水果
的数量很少,因此标记后的图像被随机增强。增强类型包括亮度增强、
对比度降低、雾化、高斯噪声、脉冲噪声、泊松噪声。如图2所示,将
每种增强类型划分为不同的增强程度,最终共生成5290张图像。从原始
图像生成的增强图像共享
为了提高果园阴影环境下绿色水果分割的准确性和效率,提出了一
种准确高效的DLNet分割模型。 新模型的框架如下图3首先,分割网络
DLNet,它使用两层GAT结构,其中顶部GAT检测被遮挡的对象,底
部GAT推断部分被遮挡的实例。利用两层GAT结构,获取被遮挡部分的
实例并且通过全卷积网络(FCN)生成掩码(Long等人,2015)以生
成水果所在的详细区域。
3.1.
特征提取
RS-RFP
检测网络
特征提取RS-RFP检测网络由提取、融合和细化三部分组成,
晚上
87/336
38/125
125/461
3. DLNet
双层遮挡分割模型
后
80/464
33/179
113/643
剩余11页未读,继续阅读
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
