光场盲运动去模糊:理论与算法突破
14 浏览量
更新于2025-01-16
收藏 4.2MB PDF 举报
光场盲运动去模糊方法的研究
本研究论文探讨了在三维摄像机运动的光场中去除运动模糊的问题,其主要背景是运动模糊是由物体和摄像机之间的相对运动导致的,尤其是在光场相机中,由于场景深度范围广泛和相机的平面外运动,运动模糊的影响尤为显著。作者普拉图尔山口Srinivasan和Ren Ng,以及Ravi Ramamoorthi来自加州大学伯克利分校和圣地亚哥分校,他们的研究专注于理解运动模糊对光场的影响,并提出了一种创新的处理策略。
论文首先介绍了运动模糊的普遍性,指出传统的二维图像处理无法完全捕捉到这种现象的复杂性。他们观察到,对于平移运动,光场模糊可以简化为清晰光场与摄像机运动路径内核的卷积,这一特性使得在光场中应用简单的去卷积技术成为可能,从而恢复出清晰的图像,这是传统图像处理中不具备的能力,因为运动模糊的程度会随深度变化(如图1A和1B所示)。
对于更复杂的平面外运动,他们理论推导了一个前向模型,表示运动模糊光场是沿相机运动路径的尖锐光场经过积分变换的结果。通过分析原始域和傅立叶域中的运动模糊光场,他们发现捕捉到的4D光场提供了关键信息,有助于区分传统二维图像无法提供的运动模糊特征。在不依赖于精确场景几何形状的情况下,他们提出了一种盲运动去模糊算法,能够在不知晓合成运动路径的情况下,准确地恢复出光场的清晰度和相机的运动轨迹(如图9所示的实际手持摄像机运动案例)。
这项工作不仅提升了对运动模糊现象的理解,还提供了一种实用的工具,特别是在光场相机的应用中,如增强现实、虚拟现实和三维重建等领域。它扩展了运动去模糊技术的传统边界,使得在处理动态场景时能更有效地恢复细节和清晰度。
3960
0
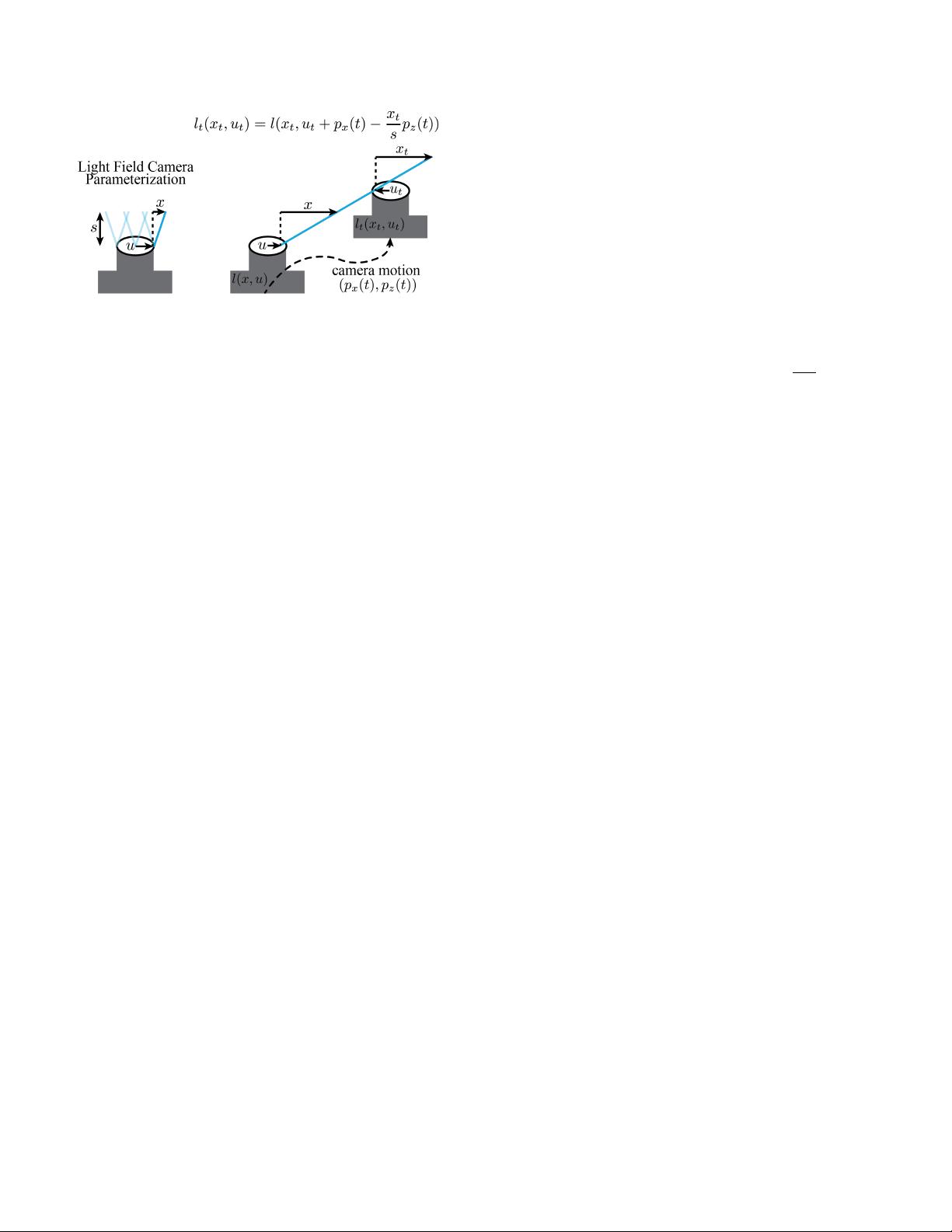
图2. 左图:我们对光场使用2平面参数化,其中每条射线
(x
,
u)由其与u和x平面的截距定义,该平面由距离s分
开。注意,x坐标是
3.2.
空间角度与傅立叶分析
我们研究了原始空间角度和傅立叶域中的运动模糊
光场,以更好地理解相机运动对捕获的光场的影响。
我们用大写字母表示傅立叶域中的信号,并使用
x
和
u
表
示空间频率和角频率。
利用傅立叶变换的仿射定理是有用的
[5
,
29]
:如
果
h
(
a
)
=g
(
M
b
+
c
),其中
M
是矩阵,
a
,
b
和
c
是
向量,
h
和
g
是函数,相关的傅立叶变换如下所述
H
(
λ
)
=
|
d
e
t
(M)
|
−
1
G
(
M-T
)
e
x
p
(
2
π
i
<
$
T
M
−
1
c
)
,
相对于u坐标,这便于后面的推导。右:考虑相机沿着路径p
(t)平移,
其中
det
(
M
)是
M
的行列式,
i=
-
1。
(
三
)
(p
x
(t)
,
p
y
(t)
,
p
z
(t))(在平地上,我们认为
x和z)。每次的本地相机坐标系
我们用它来对观察到的
运动
模糊
在Eq.
.
2、具有
可调
变换的MA-
t的原点位于相机光圈的中心。
光场l
t
(x
t
,
u
t
)是本应是
三次
M
=
1
0
−
p
z
(
t
)
1
∫
和
c
=
p
x
(
t
)
:
在时间t由相机记录,在本地相机坐标中
在时间t。 图中显示了局部坐标系中的ray(x
t
,
u
t
)
F
(
x
,
u
)
=
L(
π
x
+
p
z
(t))
exp [2
πi∈
u
p
x
(t)
]
dt.
在时间t的
nate
帧等于
t
中的
ray
(x
,
u
+
p(t)-xtp(t))
不
t x
s
z
时间t= 0时的局部坐标系。
其中,
f
是观察到的光场,而
lt
(
xt
,
ut
)是曝光期间
时间
t
处的锐光场
图
2
示出了基于相机运动路径
p
(
t
)
=
(
p
x
(
t
)
,
p
z
(
t
))(
p
y
(
t
)不包括在平地分析中,但包括在
完整
3D
模型中),时 间
t
处的光场是时间
t= 0
,
l
(
x
,
u
)处的我们的光场参数化等效于将光场视为
具有投影中心
u
和传感器像素
x
的针孔相机的集合,
并且我们设置
x
和
u
平面之间的间隔
s= 1
,因此
x
是在
z
方向上在
u
上方
1
个单位的射线然后,观察到的运动
模糊光场是
∫
f
(
x
,
u
)
=
l
(
x
,
u
+
p
x
(
t
)−
xp
z
(
t
))
dt.
(二)
不
由于光场包含与两个参数化平面相交的所有光线,
因此只要参数化平面位于可见场景几何体的凸包之
外,该前向模型就考虑了被遮挡的点。某些罕见的场
景,如微距摄影镜头,其中相机在曝光期间在草叶之
间移动,可能会违反这一假设,但它通常适用于典型
的摄影情况。该模型还假设光场参数化平面是内-外投
影的。
(四)
如图所示。傅立叶谱是基于面外运动
pz
(t)的剪切
积分,在对应于面内运动的复指数中也有一个相位。
该复指数是δ(x)δ(u+p
x
(t))的傅里叶变换,因此
我们可以将平坦原始域运动模糊光场重写为
∫
f
(x
,
u)
= [
l
(x
,
u-xp
z
(t))<$δ(x)δ(u
+
p
x
(t))
]
dt.
(五)
不
空间和频域表达式现在分离平面内运动和平面外运
动,平面内运动是与对应于平面内相机运动路径的核
的卷积,平面外运动是在空间和频域两者中的剪切上
的积分注意,该卷积核被限制到光场空间的子空间
(对于平坦光场,2D的1D子空间,以及对于全光场,
4D的2D子空间)。
为了更好地理解这些表达式,我们考虑了两种特殊
情况,即纯平面内摄像机运动和纯平面外摄像机运
动,一般运动是这两种情况的组合的积分
3.2.1
平面内摄像机运动
对于平行于
x
和
u
参数化平面的相机运动路径,
pz
(
t
)
= 0
,并且原始域运动模糊光场的表达式简化
为
∫
nite,因为摄像机运动会导致时间t处的清晰光场包含
光视场之外的光线
f
(
x
,
u
)
=
l
(
x
,
u
)
不
δ
(
x
)
δ
(
u
+
p
x
(
t
))
dt
(
六
)
√
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
125 浏览量
2021-05-21 上传
914 浏览量
2021-02-05 上传
2021-02-12 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
