深度学习与BP层融合:提升密集预测任务性能
34 浏览量
更新于2025-01-16
收藏 1.03MB PDF 举报
"信念传播重新加载:用于标记问题的BP层学习"这篇论文探讨了如何融合深度神经网络(DNN)与图形模型,特别是利用信念传播(BP)算法,以创建更为高效且具有更好正则化的复合模型。作者们针对计算机视觉中的密集预测任务,如语义分割、立体深度重建和光流,提出了创新性的BP层设计。
传统上,卷积神经网络(CNN)在这些任务上取得了显著进步,但它们对于长距离空间相互作用和结构约束的处理能力有限。条件随机场(CRF)在处理这类问题时表现出色,通过考虑全局信息来增强预测精度。然而,将CRF与CNN结合的训练过程通常涉及到复杂的推理步骤,这在随机梯度下降等常用优化算法中构成挑战。
论文的核心贡献在于将截断的最大乘积置信传播(Truncated Max-Product BP,TMPBP)作为深度学习模型的组成部分。TMPBP被设计成一个BP层,它可以直接与CNN的边缘损失学习公式相集成,并支持反向传播更新。这样,BP层可以在CNN中作为一个中间或最终块,构建一个层次化的模型,其中包含了不同尺度的BP推理和CNN处理。
通过这种设计,论文提出了一种新颖的方法,能够在保持CNN的灵活性的同时,引入CRF的结构信息,从而提高模型的鲁棒性和准确性。在实验部分,作者展示了BP层模型在多个标准基准测试中的性能,如Kitti、Cityscapes和Sintel,证明了其在参数效率和模型稳定性方面的优势。
总结来说,这项工作解决了将CRF推理融入深度学习训练过程中的难题,通过BP层实现了高效且灵活的复合模型,为密集预测任务提供了更强大的工具。这不仅有助于解决现有挑战,也为未来的研究者探索更深层次的模型融合提供了新的思路。"
7902
+
I
J
ni
Σ
Σ
˜
Σ
Σ
Z
˜
我
我
I
J
我
J
我
我
ni
我
I
J
S
ni
i
∈V
(
i
,
j
)
∈E
p
:
V
L
→
R
+
,可以写成以下形式:
p
(
x
)
=
1
exp
.
n
(
x
)
+
n
(
x
,
x
)
n
(
1
)
其中
Z
是归一化常数,函数
g
i
:
L →
R
是
一元分数
1
,
通常包含数据证据
;
函数
f
ij
:
L
2
→
R
是衡量节点
i
和
j
处
标签兼容性的
成对分数
。
A
通用报告格式
p
(
x
|
y
)
是
MRF
模型(
1
),其分数取决于输入
y
。
置信传播[37]被提出来计算当图G是树时MRF(1)
的边际概率。BP迭代地从节点发送
消息
M
ij
∈R
L
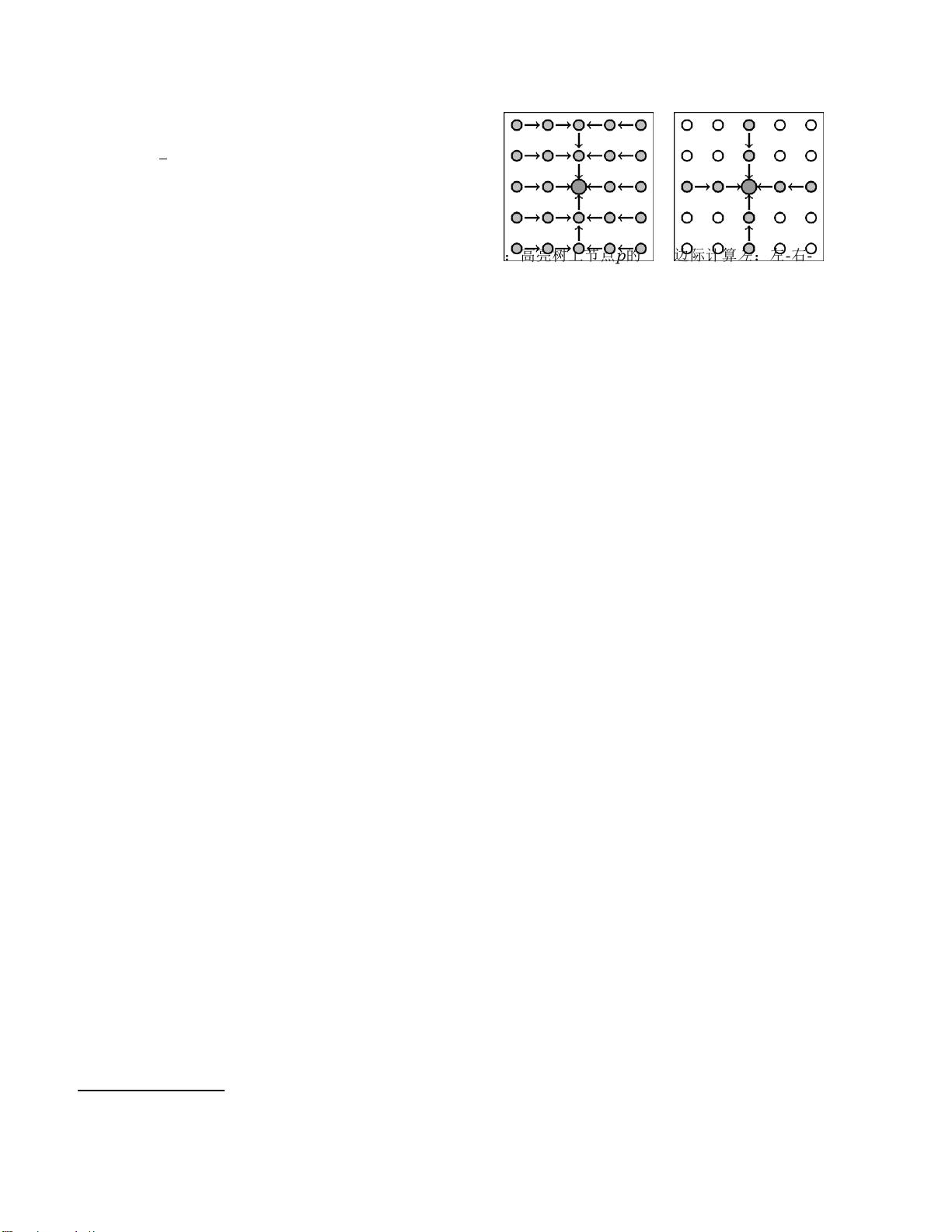
图2:高亮树上节点p的最大边际计算
左
:左-右-上-下
BP [43]或等效树DP [2]。
右
:4-连通图上的SGM [13]。
注意,节点p的SGM预测使用小得多的树,忽略来自树
外节点的证据。
i
发送到节点
j
,并更新:
M
k
+1
(
t
)
{
g
i
(
s
)
e
f
i
j
(
s
,
t
)
Y}
M
k
(s)
,
(
2
)
对于任何元组(a
1
. . . a
n
)。 先前的工作已经注意到,
s
n∈N
(
i
)
\j
其中 N(i)是节 点i的相邻节点的集合,k是迭代次
数。在树图中,消息
M
ij
与以(i
,
j
)
结束的树分支的
配置在j处选择标签t的边际概率成比例。迭代所有消息
的更新,直到消息
收敛。然后,边缘,或在一般的图
信念
,被定义为
实际上,最大边缘可以用来评估不确定性。
污点[23],
即
,它们可以被看作是对边缘的近似。扰动
和MAP技术[36]使关系更加精确。在这项工作中,我
们应用最大边际近似边际作为一个实用和快速的推理
方法,预测时间和学习。我们依靠深度学习来弥补近
似。特别地,学习可以通过按比例增加所有输入来收
紧(6)。
B
(
x
)
∈
g
i
(
x
i
)
Y
M(x)
,
(
3)
总而言之,我们对边缘的近似,
构造是通过运行更新(4)与硬
max,然后从log-信念(5)计算信念为
其中比例常数确保
sBi
(
s
)
=
1
。
BP的上述
和
-
积
变体可以在
对数域,其中与最大乘积
BP
的连接
变得明显。 我
们用max
表示映射
(
a1
,
.
-
是的
-
是的
a
n
)
到
log
即
已
知为对数和
exp
或
平滑最大值
。和积
BP
(
2
)的更新
可以表示为
m
k
+1
(
t
)
:
=
m
ax
.
g
i
(
s
)
+
f
i
j
(
s
,
t
)
+
m
k
(
s
)
,
(
4
)
n∈N
(
i
)
\j
B
i
(
x
i
=
s
)
=
s
of
t
m
ax
b
i
(
s
)
,
(
7
)
S
其
中
t
的s
m
ax
s
b
i
(
s
)
=
e
b
i
(
s
)
/
s
e
b
i
(
s
)
.
以这种
方式
构造的信念
边缘或作为后续层的输入,类似于简单的逻辑回归模
型如何组成以形成S形神经网络。这种方法类似于以前
的工作,在随后
细化步骤[18],但更好地解释和学习
我们的方法。
其中m是对数域消息,定义为加法常数。对数
信念
分
别为
3.
扫描BP层
b
i
(
x
i
)
=
g
i
(
x
i
)
+
n∈N
(
i
)
m
ni
(x
i
).
(
五)
当BP应用于一般图时,更新的时间表变得重要。我
们发现并行同步更新调度[38]需要太多的迭代
log域中的
最大乘积
BP采用相同的形式
与(4)相同,但具有硬最大操作。最大乘积解决了找
到最大概率的配置x(MAP解决方案)的问题,并通过
(5)计算
最大边际
。它可以被看作是边际问题的近
似,因为
以在图像上传播信息并且很少会聚。对于深度学习中
的应用,我们发现[43]提出的在不同方向上进行顺序扫
描的时间表更合适。对于给定的扫描方向,我们可以
计算所有顺序更新的结果这允许任意
最大
值
a
i
我
≤max
a
i
我
≤max
a
i
我
+
logn
(
6
)
在扫描方向远处,当在像素级上工作
p
p
n∈N
(
i
)
[1
]在最小化的背景下,负的分数被称为
成本
这使得这个时间表非常强大。
剩余11页未读,继续阅读
161 浏览量
1009 浏览量
160 浏览量
3243 浏览量
449 浏览量
点击了解资源详情
550 浏览量
115 浏览量
672 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现ART与SART算法在医学CT重建中的应用
- S2SH整合版:快速搭建Struts2+Spring+Hibernate开发环境
- 托奇卡项目团队成员介绍
- 提升外链发布效率的SEO推广神器——搜易达网络推广大师v2.035
- C#打造简易记事本应用详细教程
- 探索虚拟现实地图VR的奥秘
- iOS模拟器屏幕截图新工具
- 深入解析JavaScript在生活应用开发中的运用
- STM32F10x函数库3.5中文版详解与应用
- 猎豹浏览器v6.0.114.13396 r1:安全防护与网购敢赔
- 掌握JS for循环输出的最简洁代码技巧
- Java入门教程:TranslationFileGenerator快速指南
- OpenDDS3.9源码解析及最新文档指南
- JavaScript提示框插件:鼠标滑过显示文章摘要
- MaskRCNN气球数据集:优质图像识别资源
- Laravel日志查看器:实现Apache多站点日志统一管理
