实例级显著对象分割方法及性能
PDF格式 | 1.07MB |
更新于2025-01-16
| 30 浏览量 | 举报
1
实例级显著对象分割
李冠斌
1
、
2
谢元
1
梁林
1
宜州余
2
1
中山大学
2
香港大学
摘要
由于深度卷积神经网络,图像显著性检测最近取得
了快速进展。然而,现有的方法都不能识别对象
输入
显著区域
已过滤的突出
对象提案
显著实例分割
检测到的显著区域中的实例。在本文中,我们提出了
一个显着的实例分割方法,产生一个显着性掩模与不
同的对象实例标签的输入图像。我们的方法包括三个
步骤,估计显著图,检测显著对象轮廓和识别显著对
象实例。对于前两步,我们提出了一个多尺度显着性
细化网络,它生成高质量的显着区域掩模和显着对象
轮廓。一旦与多尺度组合分组和基于
MAP
的子集优化
框架相结合,我们的方法可以产生非常有前途的显著
对象实例分割结果。为了促进显著实例分割的进一步
研究和评价,我们还构建了一个新的数据库,包含
1000
幅图像及其逐像素显著实例标注。实验结果表
明,我们提出的方法是能够
achieev- ing
国家的最先进
的性能在所有公共基准的显著区域检测,以及我们的
新数据集的显著实例分割。
1.
介绍
显著对象检测试图定位图像中最显著和吸引眼球的
对象区域。它是计算机视觉中的一个基本问题,并作
为预处理步骤,以促进广泛的视觉应用,包括内容感
知图像编辑[4],对象检测[38]和视频摘要[36]。
最近,由于深度卷积神经网络的部署,显著对象检
测的 准确 性得 到了快 速提 高[29, 30, 33 ,45]。然
而,大多数先前的方法仅被设计为检测属于任何显著
对象的像素,即,一个密集的显着性图,但不知道显
着对象的个体实例。我们将这些方法执行的任务称为
通讯作者(电子邮件:yizhouy@acm.org)。
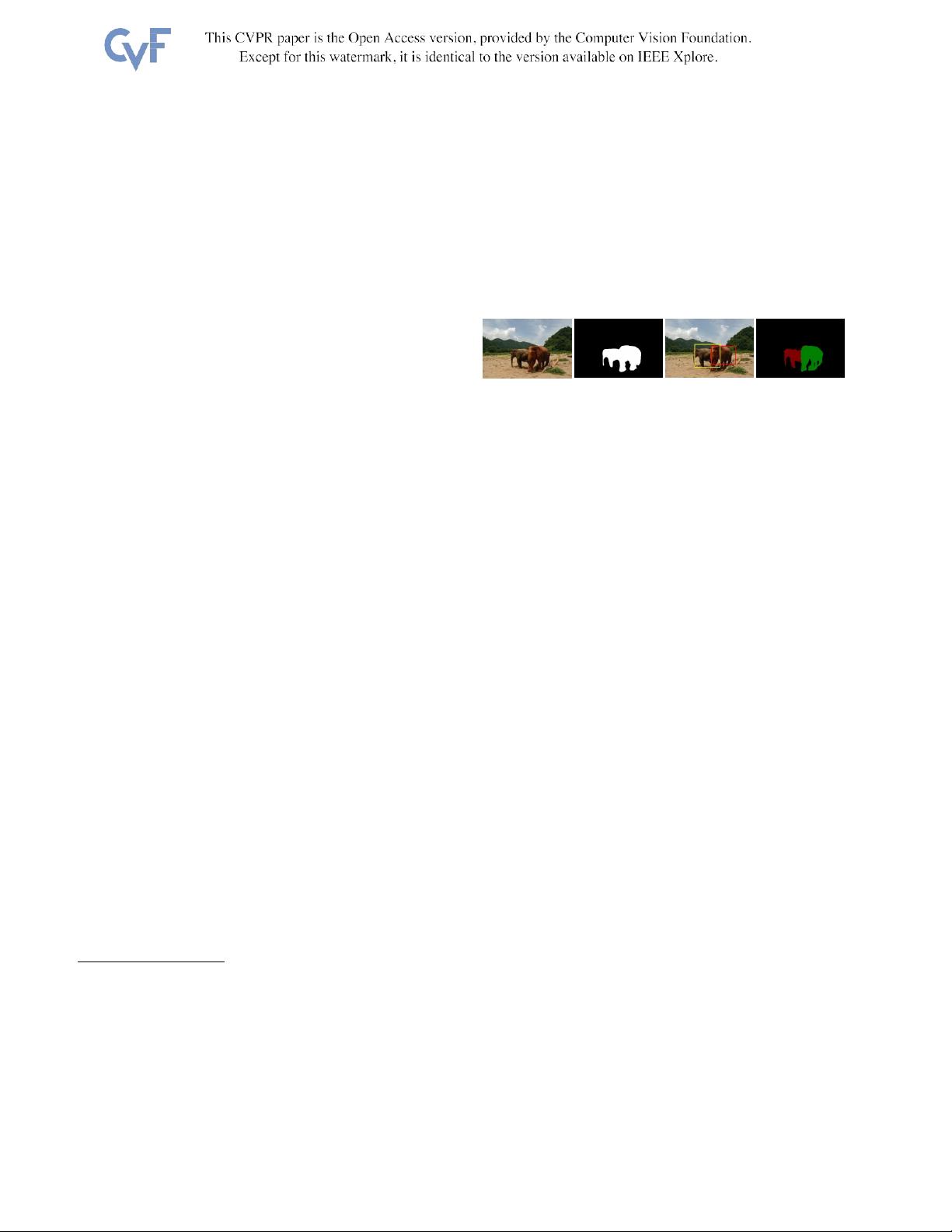
图1.实例级显著对象分段的示例
第左:输入图像。左中:检测到的显著区域。中间右侧:过
滤突出对象建议。右:显著实例分割的结果。不同的颜色指
示检测到的显著区域中的不同对象实例。
区域检测在本文中,我们解决了一个更具挑战性的任
务 , 即 实 例 级 显 著 对 象 分 割 (或 简 称
显 著 实 例 分
割
),其目的是在检测到的显著区域中识别单个对象
实例(图1)。①的人。下一代显著对象检测方法需要
在检测到的显著区域内执行更详细的解析以实现这一
目 标 , 这 对 于 实 际 应 用 至 关 重要 , 包 括 图 像 字 幕
[25],多标签图像识别[46]以及各种弱监督或无监督学
习场景[28,9]。
我们建议将突出实例分割任务分解1)估计二进制显
着图。在该子任务中,预测像素级显著性掩模,指示
输入图像中的显著区域2)检测显著对象轮廓。在这个
子任务中,我们对单个显著对象实例执行轮廓检测。
这样的轮廓检测预期抑制虚假的边界以外的对象轮
廓,并指导显着的对象的建议的生成。3)识别显著对
象实例。在该子任务中,生成显著对象提议,并且选
择显著对象提议的小子集以最好地覆盖显著区域。最
后,基于CRF的细化方法被应用于改善显著对象实例
的空间一致性。
最近的一些论文已经探索了使用全卷积神经网络来
生成显着性掩模[30,33,45]。虽然这些方法是有效
的,并能产生良好的效果,但它们都有自己的局限
性。这些方法中的大多数通过从单个VGG网络的内部
多层结构中学习对比来推断显着性[45,33]。由于它
们的输出是从具有统一大小的接收字段中导出的,因
此它们的性能可能不佳
2386
下载后可阅读完整内容,剩余9页未读,立即下载
相关推荐



cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- A7Demo.appstudio:探索JavaScript应用开发
- 百度地图范围内的标注点技术实现
- Foobar2000绿色汉化版:全面提升音频播放体验
- Rhythm Core .NET库:字符串与集合扩展方法详解
- 深入了解Tomcat源码及其依赖包结构
- 物流节约里程法的文档整理与实践分享
- NUnit3.vsix:快速安装NUnit三件套到VS2017及以上版本
- JQuery核心函数使用速查手册详解
- 多种风格的Select下拉框美化插件及其js代码下载
- Mac用户必备:SmartSVN版本控制工具介绍
- ELTE IK Web编程与Web开发课程内容详解
- QuartusII环境下的Verilog锁相环实现
- 横版过关游戏完整VC源码及资源包
- MVC后台管理框架2021版:源码与代码生成器详解
- 宗成庆主讲的自然语言理解课程PPT解析
- Memcached与Tomcat会话共享与Kryo序列化配置指南
